Основные задачи автоматизации водоотливных установок
Задачи, решаемые системами автоматизации водоотливных установок различных АТК, как правило, сходны либо близки по основным положениям. В этой связи показателен перечень основных задач автоматизации процесса откачки воды из шахт и рудников.
Основными задачами автоматизации процесса откачки воды из шахт являются следующие:
– обеспечение нормального функционирования водоотлива без постоянного присутствия обслуживающего персонала;
– пуск и остановка насосов в зависимости от уровня воды в водосборнике в пределах регулировочной емкости;
– автоматическое управление насосными агрегатами;
– поочередная работа насосных агрегатов;
– автоматическое включение резервных насосных агрегатов при неисправности и автоматическом отключении работавших;
– возможность применения различных способов заливки: баковыми аккумуляторами; с применением погружных насосов или погружных камер; из нагнетательного трубопровода; вспомогательным насосом и сифонным способом;
– дозирование заливки по времени;
– быстрое переключение с автоматического управления на ручное.
Кроме того, система автоматизации процесса откачки воды должна обеспечивать:
– местное (ручное) управление отдельными агрегатами для наладочных и ремонтных работ;
– местное управление любым числом насосных агрегатов без нарушения работы остальных агрегатов в автоматическом режиме;
– аварийный останов насосов пи снижении или потере производительности, перегреве подшипников, исчезновении напряжения в цепях управления, коротких замыканиях;
– блокировки, исключающие возможность: пуска насосного агрегата при незалитом насосе, включения моторного привода задвижки до пуска насосного агрегата, останова насосного агрегата до полного закрытия задвижки, дистанционного включения насосов при отсутствии воды в водосборнике, повторного включения аварийно отключившегося насоса до устранения причины аварийного отключения;
– контроль производительности насосов, перегрева подшипников и положения задвижек;
– гидравлическую защиту, защиту от перегрева подшипников скольжения и другие виды защит;
– сигнализацию: в камере водоотлива – об аварийном отключении насосного агрегата и о наличии напряжения в цепях управления; в центральном диспетчерском пункте шахты – о работе насосных агрегатов (световую), об аварийном отключении насосных агрегатов (обезличенный сигнал), аварийном уровне воды в водосборнике, неисправности сигнальных цепей (звуковую и световую) и о наличии напряжения в цепях управления.
Независимо от технологической схемы водоотлива существуют общие задачи автоматизации водоотливных установок:
– высвобождение обслуживающего персонала;
– повышение надежности и безопасности горных работ;
– обеспечение оптимальных режимов работы насосов за счет регулирования их производительности.
С позиций управления и экономической эффективности процесс автоматизации водоотливных установок в СССР развивался двумя этапами:
первый этап – автоматизация процесса пуска и остановки насосов в функции уровня воды в водосборнике;
второй этап – автоматическое управление насосом в целях обеспечения оптимальных режимов работы водоотливной установки.
Экономическая эффективность первого этапа автоматизации обеспечивается высвобождением обслуживающего персонала. На втором этапе автоматизации эффективность достигается:
а) упрощением гидравлических и электрических схем водоотлива, т.к. не требуется заливочных систем и сложных программирующих устройств;
б) сокращением емкости водосборников на 30-50%;
в) сокращением на 35-75% мощности электродвигателей и производительности насосов;
г) повышением надежности водоотливных установок, т.к. известно, что около 80% всех отказов возникает в момент пуска насосов в работу;
д) снижением количества модификаций насосов за счет увеличения рабочей зоны промышленного использования насосов.
В СССР основное внимание уделялось первому этапу автоматизации. В соответствии с требованиями первого этапа автоматизации аппаратура управления должна обеспечивать три вида управления: автоматическое, местное (в камере водоотлива) и дистанционное (от диспетчера).
Следует отметить, что в последние годы получило известность и другое направление автоматизации водоотливных насосов (более распространенное в дальнем зарубежье), как отмечалось выше, основанное на использовании одного насоса с частотно-регулируемым асинхронным электроприводом. В этом случае мощность двигателя выбирается из расчета максимально возможного водопритока, т.е. с учетом максимально возможной нагрузки на привод. Таким образом, при средних и малых водопритоках наблюдается явный недогруз двигателя, который однако компенсируется путем изменения его угловой скорости и, как следствие, уменьшением нагрузки и потребляемой мощности электропривода.
7.3 Промышленная аппаратура автоматизации водоотлива
Для автоматического управления водоотливными установками применяется следующая аппаратура:
АВО-3 для установок, оборудованных одним насосом с короткозамкнутым асинхронным двигателем до 120 кВт;
УАВ для установок, оборудованных насосами с высоковольтными и низковольтными асинхронными короткозамкнутыми электродвигателями. Унифицированная аппаратура УАВ имеет нормальное исполнение и может укомплектовываться для автоматизации насосов;
ВАВ для установок, оборудованных насосами (до девяти) с высоковольтными и низковольтными асинхронными короткозамкнутыми электродвигателями. Аппаратура имеет взрывозащищенное исполнение и может использоваться в шахтах, опасных по газу или пыли.
К важнейшим операциям по управлению водоотливной установкой относится заливка насоса перед включением его в работу. В настоящее время наибольшее распространение получил способ заливки при помощи заливочного погружного насоса ЗПН, который находится в водосборнике ниже нижнего уровня и постоянно залит водой.
На рисунке 7.1 представлена гидравлическая схема автоматической водоотливной установки.
Рисунок 7.1. Гидравлическая схема автоматической водоотливной установки
Здесь изображены: 1 – датчики уровня; 2 – аппарат управления (реле контроля уровня); 3 – исполнительный механизм задвижки с электроприводом; 4 – водоотливной трубопровод с обратным клапаном; 5 – датчик-реле давления; 6 – датчики температуры; 7 – датчик-реле производительности; 8 – погружной заливочный насос.
Аппаратура ВАВ обеспечивает автоматическое, дистанционное и ручное управление насосными агрегатами.
В автоматическом режиме аппаратура включает насосные агрегаты в зависимости от уровня воды в водосборнике; обеспечивает включение электродвигателей насосов с выдержкой времени при параллельной работе насосных агрегатов для исключения наложения пусковых токов и гидравлического удара; включает резервный насос при выходе из строя рабочего; заливает погружным или вспомогательным насосом главные насосы и осуществляет контроль заливки по времени, контроль работы по производительности и защиты от аварийных режимов.
Рассмотрим работу схемы ВАВ в автоматическом режиме. Приведенная на рис. 7.2 принципиальная электрическая схема автоматизации одного насоса соответствует исходному состоянию.
Рисунок 7.2. Принципиальная электрическая схема аппаратуры ВАВ
Переключатель положения ПР установлен в положение для работы насоса верхнего уровня (В). при подаче напряжения в блок управления в нем загорается сигнальная лампочка и срабатывает реле защиты РЗ1 по цепи: обмотка III трансформатора Тр3, конденсатор С7, контакт термодатчика ТДЛ, контакт конечного выключателя ПЗ1, переключатель режима работы ПР, резистор R7, конденсатор С7, диодный мост Д10-Д13, резистор R3, обмотка III Тр3. Своим замыкающим контактом реле Р31 включает реле защиты РЗ, которое подготавливает к включению цепи включения заливочного и главного насосов.
При контактировании датчика верхнего уровня ЭВ с водой замыкается цепь питания промежуточного реле РУ1 и оно срабатывает (обмотка IV Тр3, Д14, Д17, R5, РУ1, РВП1, ПР, ЭВ, вода-земля, обмотка IV Тр3). Реле РУ1 своим замыкающим контактом включает реле управления РУ (ввод б, Д21-Д24, РУ1, РУ, ПР, ввод а), которое своим замыкающим контактом РУ и электродом ЭН шунтирует контакт реле РУ1 до тех пор, пока вода в водосборнике не опустится ниже уровня электрода ЭН.
Реле РУ замыкающим контактом включает пускатель заливочного насоса (начинается заливка главного насоса) и двигатель М моторного реле времени осуществляется программа заливки, пуска и работы главного насоса.
С выдержкой времени замыкается контакт реле РВ4 и включается реле РП (обмотка II Тр3, С6, Р3-РВП2, РУ, РДВ, РВ4, R6, С6, Д6-Д9-R2, обмотка II Тр 3), которое своим замыкающим контактом включает реле пуска главного насоса Р. Последнее замыкающим контактом включает пускатель ППВ1 привода задвижки на открывание и ячейку РВД6 (если двигатель высоковольтный) или пускатель (если двигатель низковольтный) главного насоса.
Через 383 с (время работы главного насоса) замыкается контакт реле РВ2 и включается реле РВП2, которое разрывает цепи питания двигателя моторного реле РВ и реле РП. Двигатель М выключается, а реле РВП2 будет в этом случае шунтировано контактом реле РПН.
После откачки воды до нижнего уровня размыкается цепь питания реле РУ1, которое отключается и разрывает цепь питания реле РУ. Это приводит к включению пускателя ППВ1 привода задвижки, и она закроется.
При закрывании задвижки размыкается контакт КВЗ2 и обесточивается реле РП. Двигатель главного насоса отключается от сети. После полного закрывания задвижки ее пускатель ППВ1 отключается контактом конечного положения КВЗ1.
Реле РУ своим контактом включает двигатель М, и моторное реле времени РВ будет возвращено в исходное состояние, в котором двигатель М будет отключен от цепи питания контактом РВП1.
7.4 Анализ типовых алгоритмов работы
В соответствии с типовым алгоритмом работы шахтных водоотливных установок, получившим распространение в серийной аппаратуре советского изготовления, функционирование водоотлива осуществляется следующим образом [3,12-14,22,23].
После включения в работу аппаратуры и ее программного устройства контролируется уровень воды в водосборнике при помощи электродных датчиков (логическое условие р). Когда вода поднимается к датчику верхнего уровня, поступает команда на включение заливочного насоса ЗПН, который подает воду в насос в течение времени, предусмотренного программным блоком. Качество заливки контролируется реле давления РДВ (логическое условие k). Если в момент контроля уровня он достиг повышенного или аварийного уровня (р=0), программный блок сначала переключает схему на включение n насосов одновременно, а лишь затем включает заливочный насос.
Когда насос (или насосы) будет залит, подается команда на ввод его в работу с последующем контролем за производительностью при помощи флажкового реле производительности РПН (логическое условие r).
Если насос развил заданную производительность (r=1), то схема переключается на контроль нижнего уровня, при достижении которого насос будет отключен.
Если насос по какой-либо причине не развил заданной производительности, он отключается и подается сигнал диспетчеру, а аппаратура начнет новый цикл по включению в работу очередного насоса.
Приведенный алгоритм отражает только порядок выполнения основных функций по включению и отключению насосов. Наряду с ними аппаратура автоматизации обеспечивает выполнение различных контрольных и защитных функций, например, контроль температуры подшипников при помощи датчиков ТДЛ.
Таким образом, существующая аппаратура автоматизации шахтного водоотлива типа АО, ВАВ, КАВ, УАВ и др. предполагает только двухпозиционный принцип управления насосными агрегатами, обеспечивающий изменение производительности насосных комплексов лишь за счет изменения количества работающих насосов [3,12-14,22,23].
Дальнейшее повышение эффективности работы водоотливных установок может быть достигнуто при создании систем, обеспечивающих регулирование производительности насосов по алгоритму или перевод их на непрерывную откачку воды (работа на «приток»).
При этом:
- сокращается необходимая емкость водосборников на 30- 50%;
- сокращается на 35-75% мощность электродвигателей насосных агрегатов и появляется возможность применять меньшие по производительности насосы;
- повышается безотказность работы водоотливной установки, так как примерно 60% отказов возникают в момент пуска насосов;
- уменьшаются затраты на водоотлив за счет интенсивной откачки воды в часы минимума энергопотребления, когда тариф за электроэнергию минимален.
Автоматическое регулирование производительности центробежных насосов может производиться путем изменения окружной скорости рабочего колеса и без ее изменения [1].
Объект регулирования в САУ водоотливной установкой – водосборник В, а его выходной параметр – уровень воды Н, который необходимо поддерживать постоянным путем изменения производительности Qн насоса. Возмущающее воздействие в этой системе – приток воды Qпр. Дифференциальное уравнение такого объекта

где dH/dt – скорость изменения уровня воды в водосборнике, м/с;
Qпр – приток воды, м3/с;
kв = 1/F – передаточный коэффициент объекта (F – площадь водосборника, м2);
Qн – производительность насоса, м3/с.
Следовательно, объект представляет собой астатическое звено первого порядка, передаточная функция которого
Насос характеризуется угловой скоростью рабочего колеса w на входе и производительностью Qн на выходе. Он может быть представлен апериодическим звеном первого порядка с передаточной функцией
Угловая скорость рабочего колеса насоса может быть изменена путем изменения частоты f напряжения, питающего электродвигатель насоса.
Регулирование частоты в САУ в этом случае осуществляется тиристорным преобразователем частоты ТПЧ, сигнал управления a на который подается от блока управления БУ. Измерение выходного параметра объекта Н производится датчиком уровня ДУ. Знак и уровень сигнала рассогласования DU между фактическим Uф и заданным U3 значениями уровней определяет характер выходного сигнала блока управления БУ. Сигналы Uф и U3 соответственно пропорциональны Н3 и Нф. Для получения непрерывного сигнала Uф используются индуктивные и реостатные датчики с поплавковым чувствительным элементом, а также другие типы уровнемеров.
В последние годы в горной промышленности также получил распространение способ регулирования производительности насоса при неизменной частоте вращения рабочего колеса за счет впуска воздуха во всас. Этот способ отличается простотой и достаточно экономичен [1].
Режим саморегулирования возникает в результате того, что давление в точке а (место подвода воздушной трубки к всасывающему трубопроводу насоса) определяется гидростатическим давлением Ра, пропорциональным уровню воды в водосборнике и потере напора на участке а-b.
Если при некотором уровне Н давление Ра больше потерь во всасывающем трубопроводе на участке a – b , т.е. (Ра – Рат) < 0, то воздух в насос не поступает и его производительность максимальна. При (Ра – Рат) > 0 воздух засасывается в насос и его производительность падает.
Гидравлическая схема САУ производительности насоса подачей воздуха во всас в режиме саморегулирования приведена на рисунке 7.3,а.
Объектом регулирования в САУ при подаче воздуха во всас также можно считать водосборник В (рисунок 7.3,б).

Рисунок 7.3. Гидравлическая (а) и функциональная (б) схемы САУ производительности насоса подача воздуха на всас
Дифференциальное уравнение звена «насос – трубопровод» (Нс – насос)
где Тн – постоянная времени звена;
q – объемный расход воздуха.
Следовательно, звено «насос – трубопровод» представляет собой периодическое звено первого порядка, передаточная функция которого
Уравнение звена «подводящая трубка» Т описывается безынерционным, усилительным звеном:
В зависимости от постановки задачи при автоматическом регулировании производительности насосных агрегатов могут быть реализованы различные алгоритмы управления: поддержание постоянного уровня воды в водосборнике; изменение уровня воды по заданной программе; выравнивание нагрузки на шинах шахтной подстанции.
В то же время более современным является регулирование с помощью преобразователей частоты, которые позволяют плавно изменять частоту вращения электродвигателя насоса и, таким образом, регулировать его производительность и поддерживать заданный уровень при различных водопритоках.
При малом притоке двигатель насоса вращается с малой скоростью, достаточной для поддержания низкого уровня воды в водосборнике (зумпфе), и расходует минимум энергии. При повышении водопритока, достигающего определенного значения, скорость двигателя и, как следствие, производительность увеличивается [1,2].
7.5 Система управления насосом с преобразователем частоты
Наиболее современным, как отмечалось ранее, является регулирование с помощью преобразователей частоты, которые позволяют плавно изменять частоту вращения электродвигателя насоса и, таким образом, регулировать его производительность и поддерживать уровень в водосборнике при различных притоках перекачиваемой жидкости. При малых притоках жидкости двигатель насоса вращается с малой скоростью, необходимой только для поддерживания минимального (нижнего) уровня, и расходует минимум энергии.
На рисунке 7.4 показана функциональная схема регулирования электродвигателя насоса с использованием преобразователя частоты FR-A500 фирмы Mitsubishi Electric.
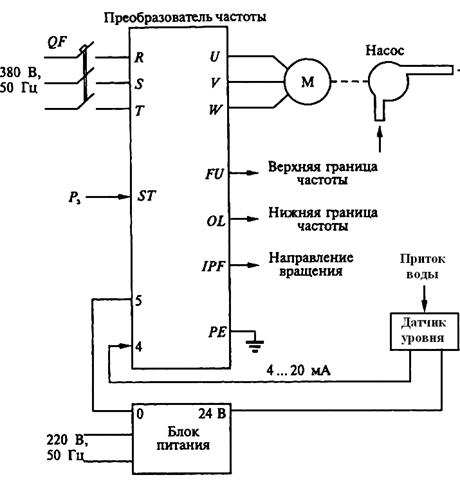
Рисунок 7.4. Функциональная схема регулирования электродвигателем насоса с использованием преобразователя частоты
На вход системы подаются сигнал задания и сигнал, получаемый с датчика уровня. Отклонение между реальным и заданным значениями уровня преобразуется регулятором в сигнал задания частоты, под воздействием которого преобразователь изменяет частоту вращения двигателя насоса, стремясь свести разность между заданием и реальным значением уровня к нулю. Таким образом, минимальный уровень воды в водосборнике поддерживается независимо от притока жидкости.
Современные преобразователи частоты позволяют создавать системы управления любой сложности без дополнительных аппаратных средств – программным способом с использованием программируемого промконтроллера.
В этом случае возможно также использование алгоритма работы САУ водоотливного насоса на основе правил нечеткой логики.
Дата добавления: 2016-01-26; просмотров: 7254;