Автоматизированный участок металлообработки
Рассмотрим автоматизированный участок металлообработки фирмы Murata (рисунок 8.2) [18].
Рисунок 8.2
На рисунке 8.2 приняты следующие обозначения:
1 – трасса передвижения робокаров; 2 – робокар; 3 – устройство автоматической смены спутников; 4 – участок механической обработки; 5 –участок доставки заготовок на склад; 6 – кран-штабелер; 7 – многоярусный склад с автоматическим складированием и поиском; 8 – конвейер готовых деталей; 9 – подготовительный участок.
Для обслуживания шести входящих в ГПС роботизированных технологических комплексов, созданных на базе трех токарных обрабатывающих центров, многоцелевого, кругло- и плоскошлифовального станков, в складе предусмотрено 543 стеллажа. Все станки оснащены ЧПУ типа CNC и обслуживаются двумя робокарами модели Roevatran фирмы Poivak Automaithen.
Для привода робокаров обычно используют электродвигатели постоянного тока со смешанным возбуждением. Скорости движения от 30 для небольших робокаров до 60 м/мин для большинства типов, используемых в механических цехах. В робокарах применяют рекуперативное торможение и механическое торможение с помощью электромагнитов.
На автоматизированном участке металлообработки фирмы Murata применяют робокары с индуктивным управлением, которые имеют возможность поворота на угол 90°, а некоторые даже на угол 360°. Обычно индуктивный кабель размещают в полу цеха в узких траншеях шириной 3... 10 мм на глубине 10...200 мм. Индуктивное управление робокарами обеспечивается подаваемым по индуктивному кабелю переменным током низкой частоты. Вокруг кабеля возникает концентрическое электромагнитное поле. На робокаре установлены две отклоняющие катушки, регистрирующие напряжение, подаваемое на управляющее устройство робокара. Для сохранения постоянства перемещения робокара вдоль кабеля управляющее устройство непрерывно воздействует на управляющий двигатель для того, чтобы устранить разность напряжений между двумя катушками.
На некоторых робокарах устанавливают систему управления по световому лучу. Луч освещает выполненную на полу цеха флуоресцирующую полосу или уложенную на нем флуоресцирующую ленту. Фотодатчики регистрируют флуоресценцию и передают полученные сигналы на отклоняющие катушки робокара.
Кроме возможности перемещения робокара вдоль индуктивного кабеля нередко требуются сведения об его местонахождении и наличии груза. Для получения подобной информации в полу цеха в определенных местах устанавливают постоянные магниты. Такие места находятся, например, до пересечения трасс или непосредственно перед позицией загрузки-разгрузки. Для передачи управляющих сигналов перемещающимся робокаром в полу цеха могут быть вмонтированы также переключаемые катушки.
О наличии груза на робокаре сигнализируют фотоэлектрические датчики или конечные выключатели. Когда робокар прибывает на рабочую позицию станка, готовность к его приему определяется с помощью различных датчиков, например инфракрасных. После приема сигнала о готовности позиции (станции) робокар разгружается, а по окончании загрузочно-разгрузочных работ производится дальнейший обмен сигналами о готовности тележки к перемещению.
Для загрузки робокаров применяют несколько различных систем, простейшей из которых является встроенный гидравлический подъемник. Робокар с опущенной платформой входит между двумя опорными направляющими спутниками, затем приподнимает платформу, чтобы снять спутник с направляющих, и выходит обратно. Такая система пригодна для транспортирования спутников со складов на подготовительные участки или к промежуточным накопителям, но не может применяться при наличии на станках устройств автоматической смены спутников.
Управление робокарами осуществляется от ПК или технологического контроллера. Управление планированием маршрута робокара производится с помощью установленного на нем контроллера.
Кроме робокаров могут применяться транспортные тележки, которые перемещаются по стальным рельсам, прикрепленным к полу цеха. Для направления роликов тележки служит центральный рельс. Тяговое усилие тележки обеспечивает электродвигатель переменного тока. Загрузочно-разгрузочное устройство имеет гидравлический привод. При подъезде к рабочей позиции станка тележка считывает установленные на полу цеха кодовые пластины, и ее управляющее устройство останавливает тележку на соответствующей позиции.
Системы ЧПУ
Внедрение в технологические процессы вычислительной техники позволило экономически эффективно осуществить идею числового программного управления технологическим оборудованием, которая нашла широкое применение в первую очередь в управлении станками.
Числовое программное управление это управление обработкой заготовки на станке или роботом по управляющей программе (УП), заданной в цифровой форме. Станки с устройствами числового программного управления (УЧПУ) превратились сегодня в важнейший вид высокоэффективного металлорежущего оборудования. Этому способствовала не только высокая степень автоматизации обработки, но и возможность быстрой переналадки их на обработку любой детали в пределах технологических возможностей станка.
Управляющая программа включает в себя геометрическую технологическую информацию. Геометрическая информация содержит данные о траектории движения инструмента и ее параметрах. Большинство траекторий, воспроизводимых УЧПУ, представляют собой прямые и дуги окружностей, поэтому прямая и дуга окружности – это основные элементы траектории, задаваемые в управляющей программе. Более сложные, аналитически неописываемые кривые обычно аппроксимируются отрезками прямых и дугами окружностей.
Технологическая информация в УП включает в себя данные о технологических режимах станка и режущем инструменте, а также функциях дискретно-логического управления вспомогательными системами станка.
Любое устройство ЧПУ имеет четыре основных функции: цифровое управление; обработку УП; связь с оператором; диагностирование УЧПУ, тестирование программного обеспечения и аппаратных средств УЧПУ.
На рисунке 8.3 отображено содержание этих функций.
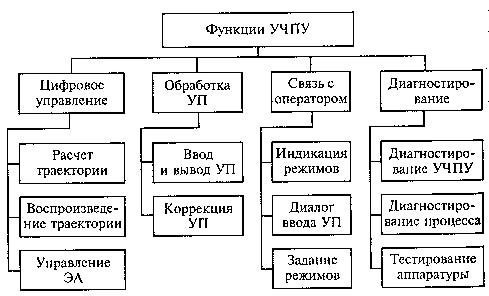
Рисунок 8.3
Группа функций цифрового управления определяет преобразование УП в сигналы управления исполнительными механизмами станка. Функция расчета траектории включает в себя: интерпретацию текста УП, коррекцию траектории движения с учетом геометрических параметров реального инструмента, расчет оптимальных режимов разгона и торможения. Функция воспроизведения траектории обеспечивает управление приводами осей геометрии станка и отслеживание правильности воспроизведения траектории. Для реализации заданной траектории необходимо в режиме реального времени вычислять координаты промежуточных точек траектории. Этот процесс называют интерполяцией. Функция воспроизведения траектории включает в себя реализацию замкнутого контура регулирования положения осей станка. Функция управления электроавтоматикой (ЭА) также осуществляется в режиме реального времени и обеспечивает выполнение технологических команд управляющей программы.
Другую группу функций составляют функции обработки УП, которые зависят от способа ее подготовки.
Различают следующие способы подготовки:
аналитический, предполагающий введение программы на языке технолога. Этот способ наиболее распространен при программировании станков с ЧПУ;
непосредственное обучение, при котором координаты точек по всем осям заносятся в память после вывода всех исполнительных механизмов в заданную точку. Этот способ используется, как правило, в промышленных роботах;
полуаналитический, при котором координаты опорных точек записываются в память УЧПУ, а участки кривых между ними аппроксимируются элементарными кривыми. Этот способ используется в контурных УЧПУ роботами (когда траектория задается пространственной кривой).
Современные УЧПУ имеют развитые инструментальные среды для интерактивного создания, коррекции и моделирования выполнения УП.
Следующая группа функций отвечает за взаимодействие оператора с УЧПУ. Традиционно ввод команд оператора в УЧПУ производится при помощи функциональной клавиатуры. Однако функциональные возможности современных УЧПУ значительно расширились, поэтому наряду со стандартной функциональной клавиатурой широко используются так называемые программные клавиши (SoftKey), назначение которых изменяется в зависимости от режима УЧПУ. Текущее назначение программных клавиш отображается на экране панели оператора. На экране также отображаются: текущее состояние и режим работы устройства, сообщения оператору, координаты текущего положения инструмента в различных системах координат, текущие технологические режимы, текст текущей управляющей программы и др.
Существует также группа функций диагностирования аппаратных средств, системного программного обеспечения, протекания технологических процессов, а также правильности вводных УП. Чем точнее указано место неисправности, тем меньше время восстановления работоспособности системы.
Для диагностирования в УЧПУ используются различные программно-аппаратные средства (датчики положения, программные счетчики и пр.).
В зависимости от выполняемого задания УЧПУ работает в различных режимах. Можно выделить несколько основных режимов работы, которые соответствуют функциям УЧПУ:
режим наладки станка. В этом режиме оператор имеет возможность управлять перемещениями станка вручную при помощи клавиатуры или специальных задающих устройств. Этот режим используется при установке и базировании заготовки на станке;
режим выхода в исходное состояние. Большинство станков оснащено инкрементальными датчиками положения осей. Следовательно, после включения УЧПУ абсолютные координаты осей станка неизвестны. Режим выхода в исходное состояние позволяет осуществить поиск ноль-меток измерительных датчиков и определить положение осей станка в его системе координат;
режим ввода и вывода информации по каналам связи. Он используется при подготовке УП и связи с внешними устройствами и модулями УЧПУ;
режим выполнения УП. Этот режим соответствует функции цифрового управления, а также включает в себя контроль состояния оборудования и работы программного обеспечения. При сбоях в работе УЧПУ должно связываться с оператором и сообщать об ошибке через интерфейс оператора. При выполнении этого задания одновременно выполняется несколько задач – интерпретация, интерполяция и др. Дискретно-логическое управление, основанное на логическом анализе поступающей с датчиков информации и соответствующей реакции на события, предусматривает также адаптацию управления к возмущениям, возникающим во время работы.
Изготовление продукции на станках с ЧПУ во многом основывается на проверенных практикой надежных типовых технологических решениях, применяющихся на универсальном оборудовании, обслуживаемом рабочим-станочником. Эти решения закладываются в основу технологических УП для станков с ЧПУ.
Рекомендуемая литература
1. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов: учебник для вузов / М.П. Белов, В.А. Новиков, Л.Н. Рассудов. – М.: Изд. центр «Академия», 2004. – С. 257-264, 514-528.
2. Лебедев А.М., Орлова Р.Т., Пальцев А.В. Следящие электроприводы станков с ЧПУ. – М.: Энергоатомиздат, 1988. – 223 с.
Лекция 9
Дата добавления: 2016-01-26; просмотров: 2626;