Тормозные устройства и динамометры
В условиях стендовых испытаний нагрузка двигателя осуществляется тормозным механизмом, оснащенным динамометром, с помощью которого определяется развиваемый двигателем крутящий момент.
Современные испытательные стенды оснащены гидравлическим или электрическим тормозными механизмами. Наибольшее распространение получили гидравлические тормозные механизмы, отличающиеся сравнительной простотой конструкции и большой энергоемкостью.
Основными узлами гидравлического тормозного механизма (рис. 1) являются статор, установленный на подшипниках в опорах станины, и ротор, вращающийся в подшипниках, соединенный муфтой с валом двигателя. Через гидравлический тормозной механизм протекает вода. При вращении ротора вследствие гидродинамического сопротивления воды создается тормозной момент, равный моменту, развиваемому двигателем. Энергия, полученная при вращении ротора, передается статору, на котором также создается момент, равный моменту, развиваемому двигателем. От проворачивания статор удерживается динамометром, с которым он соединен с помощью рычага.
Изменение тормозного момента осуществляется за счет изменения активной площади взаимодействия ротора с водой. В зависимости от степени заполнения водой используются гидравлические тормозные механизмы полного или частичного заполнения. В тормозных механизмах полного заполнения активная площадь ротора изменяется перемещением заслонок-шиберов, установленных между ротором и статором, а в тормозных механизмах частичного заполнения — изменением количества подаваемой в гидравлический тормозной механизм воды.
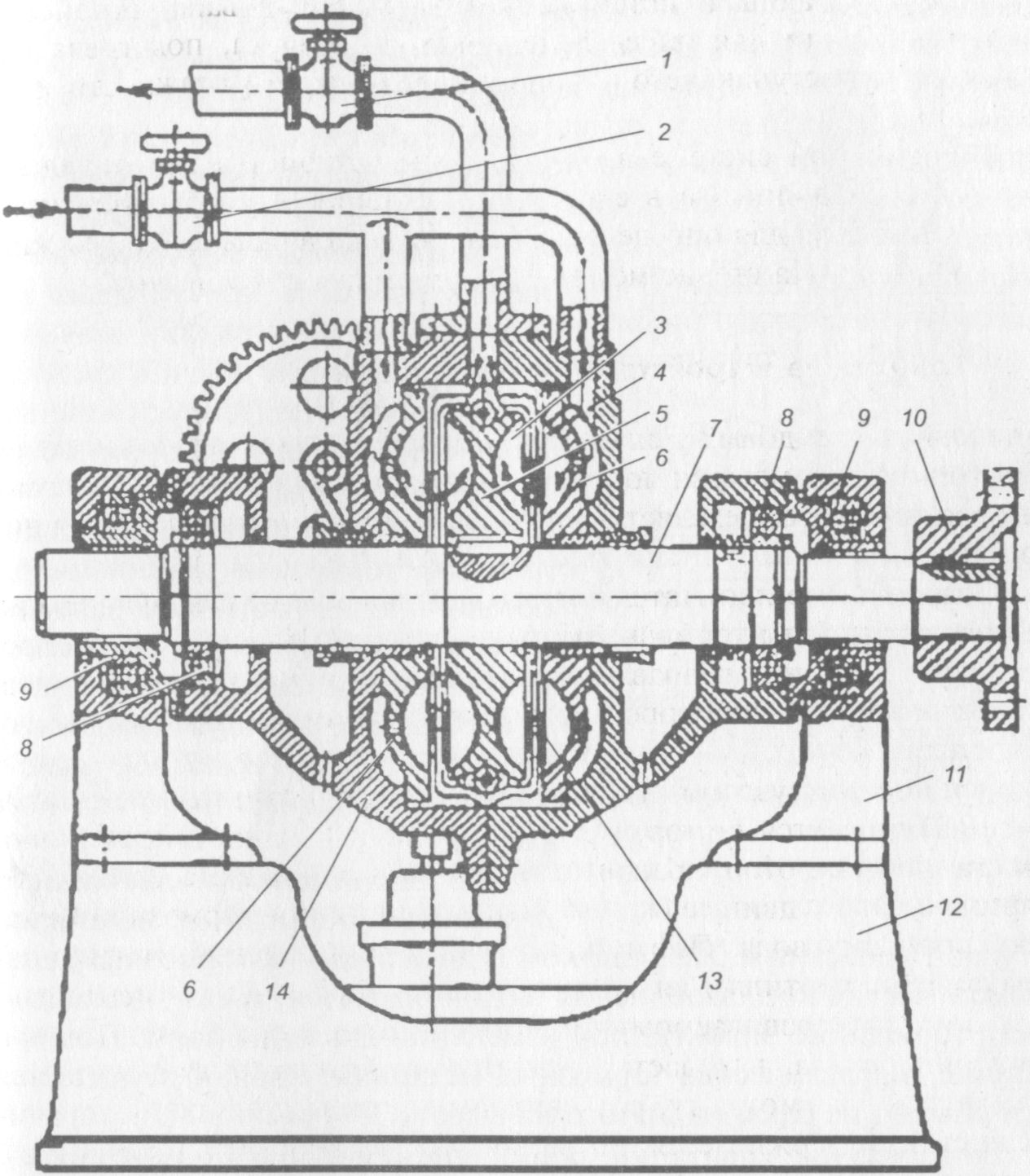
Рис. 1. Лопастной гидравлический тормозной механизм:
1 и 2 — вентили; 3 — лопатки ротора; 4 — лопатки статора; 5 — ротор;
6 — диск статора; 7 — вал ротора; 8 — подшипник ротора;
9 — подшипник статора; 10 — соединительная муфта; 11 — опора статора;
12 — станина; 13 — заслонки-шиберы; 14 — статор
Ротор и статор гидравлического тормозного механизма могут иметь различное конструктивное исполнение.
Лопастные гидравлические тормозные механизмы в роторе и в дисках статора имеют карманы овального сечения, между которыми образуются лопатки. Эти тормозные механизмы работают при полном их заполнении водой. Изменение тормозного момента осуществляется перемещением заслонок-шиберов.
В дисковых гидравлических тормозных механизмах (рис. 2) ротор выполняется в виде диска с отверстиями, а к статору крепятся диски, имеющие сотовидные рабочие поверхности.
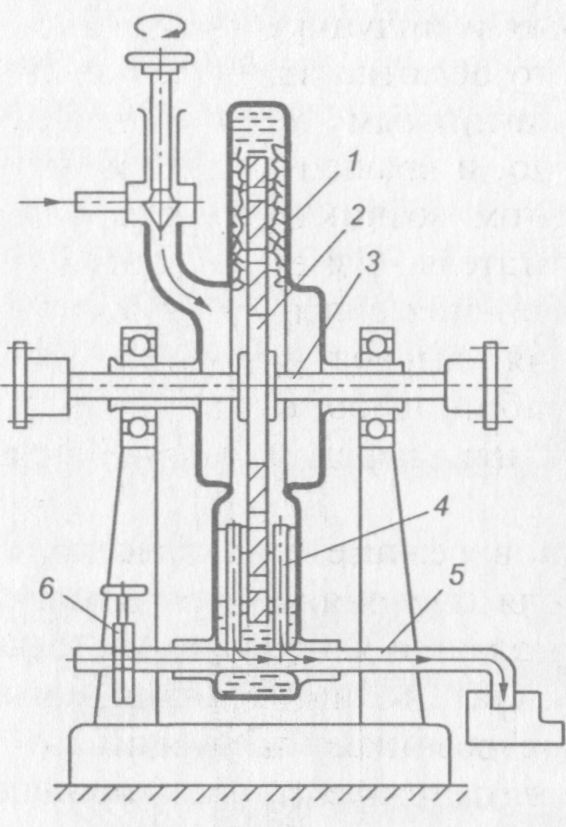
Рис. 2. Дисковый гидравлический тормозной механизм:
1 — диск статора; 2 — ротор; 3 — вал ротора; 4 — сливной патрубок;
5 — сливная трубка; 6 — червячное колесо
В штифтовых тормозных механизмах на ободе прикреплены два или несколько рядов стальных штифтов, которые обычно крепятся и к статору. Штифты устанавливаются с небольшим зазором между штифтами ротора.
Дисковые и штифтовые гидравлические тормозные механизмы работают при их частичном заполнении водой. Вода под действием центробежной силы отбрасывается к периферии, образуя вращающее водяное кольцо. Тормозной момент зависит от толщины этого водяного кольца.
По энергоемкости дисковые и штифтовые тормозные механизмы уступают лопастным. Недостатком гидравлических тормозных механизмов частичного заполнения водой является также нестабильность тормозного момента при изменении давления воды. Поэтому питание гидравлических тормозных механизмов водой осуществляется обычно из бака, поднятого на высоту 3—4 м.
Во избежание кавитации, повышенной коррозии и образования накипи температура воды на выходе из гидравлического тормозного механизма не должна превышать 333—338 К.
В электрических тормозных механизмах статор балансирно установлен на опорах фундаментной рамы, а вал ротора соединен с двигателем.
Механическая энергия в этих тормозных механизмах преобразуется в электрическую. Так как электрические машины имеют возможность рекуперации, то в случае питания электроэнергией от внешнего источника электроэнергии они работают в режиме электрического двигателя и преобразуют электрическую энергию в механическую. Обычно используют электрические машины постоянного тока. При работе их в тормозном режиме (в режиме генератора) ток поступает на обмотку возбуждения и индуцирует магнитное поле. При вращении якоря (ротора) в его обмотке возникает электродвижущая сила. Ток якоря своим магнитным полем противодействует вращению якоря, следовательно, и вращению вала испытываемого двигателя. На статоре при этом возникает реактивный момент, равный крутящему моменту двигателя. Изменение тормозного момента осуществляется путем изменения силы тока в обмотках возбуждения. Электрическая энергия, вырабатываемая электрическим тормозным механизмом при работе в тормозном режиме, поглощается нагрузочными реостатами или передается в общую электрическую сеть.
При работе электрической машины в режиме электрического двигателя (например, для пуска двигателя или снятия его тормозных характеристик) электрический ток подается как в обмотку возбуждения, так и на цепь якоря. В результате взаимодействия магнитных полей якоря и статора на якоре возникает крутящий момент, а на статоре — реактивный момент, направленный в сторону, противоположную направлению вращения якоря.
Зависимость тормозной мощности от частоты вращения коленчатого вала определяется характеристикой тормозного механизма. Область возможных режимов работы тормозного механизма показана на рис. 3.
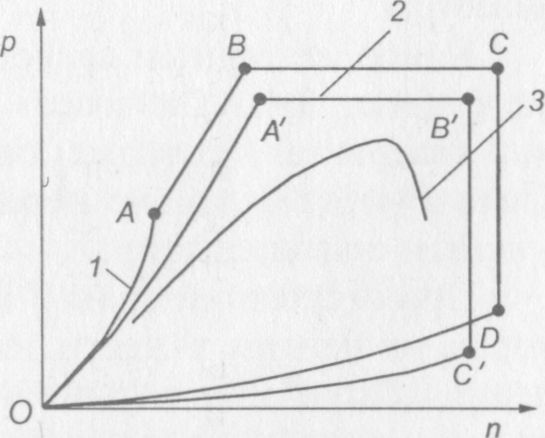
Рис. 3. Внешние характеристики:
1 — гидравлического тормозного механизма;
2 — электрического тормозного механизма; 3 — двигателя
Кривая OA на рис. 3 соответствует работе гидравлического тормозного механизма при максимально разведенных заслонках или при полном заполнении водой. На этом участке тормозная мощность изменяется в зависимости от частоты вращения коленчатого вала: Рт = an3, где а — коэффициент пропорциональности.
В точке А тормозной момент достигает максимального значения. Дальнейшее поглощение мощности возможно только при постоянном максимальном моменте, который поддерживается прикрытием заслонок или уменьшением расхода воды.
В точке В поглощаемая мощность ограничивается допустимой температурой воды. Дальнейшее повышение частоты вращения коленчатого вала возможно при постоянной мощности двигателя, следовательно, уменьшении крутящего момента пропорционально росту частоты вращения коленчатого вала. Это достигается сближением заслонок или уменьшением расхода воды.
В точке С частота вращения ограничена показателем прочности ротора. На участке CD кривой внешней характеристики крутящий момент и мощность уменьшаются пропорционально. Кривая DO соответствует изменению тормозной мощности, затрачиваемой на трение в подшипниках и ротора о воздух при отсутствии воды в гидравлическом тормозном механизме.
В электротормозе при максимально допустимой силе тока в обмотке возбуждения тормозная мощность в зависимости от частоты вращения коленчатого вала изменяется по кривой OA', которая описывается уравнением
Рт = бn2. В точке А' тормозная мощность ограничивается допустимой температурой нагрева обмоток якоря. Для дальнейшего повышения частоты вращения коленчатого вала (кривая А'В') необходимо снизить крутящий момент путем увеличения сопротивления в цепи якоря или уменьшения силы тока возбуждения. Ограничение частоты вращения коленчатого вала в точке В' обусловлено механической прочностью обмотки якоря.
Кривая С'О соответствует тормозной мощности, поглощаемой электротормозом, при отсутствии тока возбуждения.
Тормозной механизм считается пригодным для испытания двигателя, если внешняя характеристика двигателя (рис. 3) полностью соответствует площади, ограниченной внешней характеристикой тормозного механизма. В этом случае тормозной механизм обеспечивает испытание двигателя на всех возможных режимах его работы.
Для измерения крутящего момента, развиваемого двигателем, используются механические, гидравлические и электрические динамометры.
Наиболее точным является механический квадрантный динамометр
(рис. 4). Он имеет два маятника, укрепленных на кулаках-квадрантах, которые подвешены на тонких стальных лентах. Сила F через балансир передается кулакам, конструктивно объединенным с квадрантами.

Рис. 4. Схема механического квадрантного динамометра:
1 — маятник; 2 — кулак-квадрант; 3 и 7 — ленты; 4 — стрелка; 5 — кулак;
6 — зубчатая рейка; 8 — груз; 9— балансир; 10— зубчатое колесо
При отсутствии силы F маятники занимают положение, при котором их центры тяжести лежат на одной вертикали с точкой крепления ленты. Под влиянием силы F, которая передается от рычага статора тормозному механизму, маятники совершают сложное движение, перекатываясь по стальным лентам квадрантами и отклоняясь от положения равновесия. Балансир, к которому приложена сила F, сместится при этом вниз. При перемещении балансира связанная с ним зубчатая рейка поворачивает стрелку, которая указывает показание динамометра, соответствующее крутящему моменту, развиваемому двигателем:

где k = 716,2/l — постоянная (указывается в паспорте динамометра).
Дата добавления: 2016-01-26; просмотров: 900;