Первая и вторая производные от функции положения по углу называются аналогами скоростей и ускорений.
Найдем зависимости для вычисления аналогов скоростей и ускорений звеньев и точек механизма.
Дифференцируя дважды уравнение (3.4) по  , получим выражения для аналогов угловой скорости и углового ускорения шатуна
, получим выражения для аналогов угловой скорости и углового ускорения шатуна  ; (3.7)
; (3.7)  . (3.8)
. (3.8)
Дифференцируя дважды уравнение (3.5) по  , получим зависимости для нахождения аналогов скоростей и ускорений ползуна :
, получим зависимости для нахождения аналогов скоростей и ускорений ползуна :  (3.9)
(3.9)
 . (3.10)
. (3.10)
Дифференцируя дважды уравнения (3.6) по  , получим в проекциях на оси X,Y выражения аналогов скорости и ускорения произвольной точки С шатуна:
, получим в проекциях на оси X,Y выражения аналогов скорости и ускорения произвольной точки С шатуна:
 ;
;  ; (3.11
; (3.11
 ); (3.12)
); (3.12)
 .
.
При значениях  для определения перемещения, аналогов скорости и ускорения ползуна можно использовать приближенные завис
для определения перемещения, аналогов скорости и ускорения ползуна можно использовать приближенные завис
 . (3.13)
. (3.13)  . (3.14) .
. (3.14) .  (3.15)
(3.15)
Для наглядного представления о характере изменения геометрических и кинематических параметров механизма строятся кинематические диаграммы. 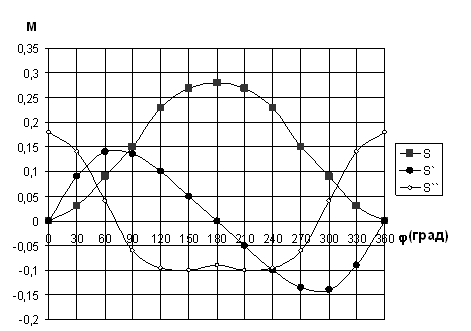
Рис.3.2
При построении необходимо учитывать взаимосвязь между ними, выражающуюся в согласованном расположении характерных точек. Нулевому значению аналога скорости соответствует максимальное (или минимальное) значение перемещения ползуна. Нулевым значениям аналога ускорения соответствуют точки максимума или минимума на графике аналога скорости и точки перегиба на графике перемещения. Точкам максимума или минимума на графике аналога ускорения соответствуют точки перегиба на графике аналога скорости.
Дата добавления: 2016-01-26; просмотров: 905;