Динамические параметры lti-моделей
Динамические свойства систем управления определяются величинами и соотношением полюсов (собственных значений) и нулей их lti-моделей. Поэтому для расчета нулей и полюсов были разработаны соответствующие функции.
Для определения полюсов используются функции pole и eig, которые можно применять к lti-моделям любого подкласса:
p=pole(sys)
p=eig(sys),
где р – массив полюсов в виде вектор-столбца.
При этом следует иметь в виду, что обе функции дают надежный результат только для некратных полюсов.
Пример 2.1. Вычисление полюсов непрерывной системы с ПФ Ф(s):
>> p1=pole(f)
p1 = -2.7524 +24.1162i
-2.7524 -24.1162i
-19.5359
-2.6558 + 2.4233i
-2.6558 - 2.4233i
-1.4289
-0.5474
Задание 2.1. Определите с помощью функции eig полюсы дискретной системы, заданной передаточной функцией T(z).
Для определения нулей используется одна функция tzero в двух вариантах обращения:
z=tzero(sys)
[z, gain]=tzero(sys)
где z – вектор возвращаемых нулей lti-модели sys; gain – коэффициент передачи в zpk-модели.
Пример 2.2. Вычисление нулей динамической системы с ПФ Ф(s):
>> z2=tzero(f)
z2 = -0.7166
-0.6461
Задание 2.2. Определите нули дискретной системы с ПФ Т(z).
Вместе с этими основными функциями часто используются еще две дополнительные функции для сортировки нулей и полюсов:esort – для непрерывных систем, dsort– для дискретных систем.
Функция esort используется для сортировки полюсов и нулей в порядке убывания их действительных частей, а функция dsort в порядке убывания их модулей.
Обе функции имеют две формы обращения:
q= esort(p), q= dsort(p)
[q, ndx]= esort(p), [q, ndx]= dsort(p),
где p – нули или полюсы lti-модели; q – вектор возвращаемых нулей (полюсов); ndx – вектор индексов нулей (полюсов), т.е. их порядковые номера до сортировки.
Пример 2.3. Сортировка полюсов и нулей непрерывной системы с ПФ Ф(s).
>> p3=esort(p1)
p3 = -0.5474
-1.4289
-2.6558 + 2.4233i
-2.6558 - 2.4233i
-2.7524 +24.1162i
-2.7524 -24.1162i
-19.5359
>> z3=esort(z2)
z3 = -0.6461
-0.7166
Задание 2.3. Произведите сортировку нулей и полюсов замкнутой дискретной системы с ПФ Т(z).
Для графического отображения расположения полюсов и нулей на комплексной плоскости используется функция pzmap, которая имеет следующий синтаксис:
pzmap(sys),
где sys – непрерывная или дискретная lti-модель.
Комплексная плоскость строится по команде автоматически. Полюсы на ней изображаются маркером х, а нули – маркером о.
Пример 2.4. Получение схемы расположения нулей и полюсов непрерывной системы с ПФ Ф(s) на комплексной плоскости (рис.2.1) с помощью команды pzmap.
>> pzmap(f)
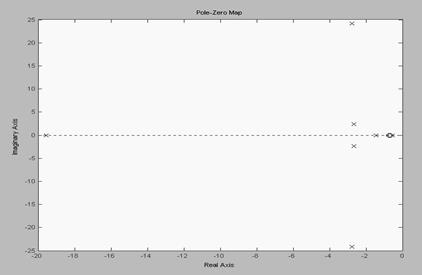
Рис. 2.1. Схема расположения нулей и полюсов
Задание 2.4. Постройте на z-плоскости план расположения нулей и полюсов дискретной системы с ПФ Т(z).
Имеется еще один вариант использования функции pzmap:
[p,z]= pzmap(sys),
при котором возвращаются значения полюсов и нулей lti-модели sys соответственно в виде векторов p и z, но без построения их схемы расположения на комплексной плоскости. Эта форма по существу объединяет действие функций pole и tzero.
Пример 2.5. Определение нулей и полюсов непрерывной системы с ПФ Ф(s) с помощью функции pzmap:
>> [p5,z5]= pzmap(f)
p5 = -2.7524 +24.1162i
-2.7524 -24.1162i
-19.5359
-2.6558 + 2.4233i
-2.6558 - 2.4233i
-1.4289
-0.5474
z5 = -0.7166
-0.6461
Задание 2.5. Вычислите полюсы и нули дискретной системы с ПФ Т (z) с помощью функции pzmap и сравните их значения с ранее полученными результатами.
Если lti-модель sys содержит комплексно сопряженные полюсы, то с помощью функции damp можно рассчитать собственные частоты ω0 и коэффициент демпфирования ξ соответствующего им колебательного оператора s2 + 2ξω0s + ω02.
Функция имеет три формы обращения:
[W,Q]= damp(sys)
[W,Q,P]= damp(sys)
damp(sys)
В первом случае возвращаются значения собственных частот ω0 и коэффициентов демпфирования  соответственно в виде векторов W, Q, во втором – дополнительно полюсы lti-модели в виде вектора Р, в третьем – полюсы в порядке возрастания их модуля, собственно модули и соответствующие им собственные частоты и коэффициенты демпфирования. При этом для операторов первого порядка коэффициент демпфирования принимается равным единице, а собственная частота – абсолютному значению полюса или нуля.
соответственно в виде векторов W, Q, во втором – дополнительно полюсы lti-модели в виде вектора Р, в третьем – полюсы в порядке возрастания их модуля, собственно модули и соответствующие им собственные частоты и коэффициенты демпфирования. При этом для операторов первого порядка коэффициент демпфирования принимается равным единице, а собственная частота – абсолютному значению полюса или нуля.
Для дискретной системы программа предварительно рассчитывает эквивалентные полюсы непрерывной lti-модели из соотношения zi=exp(piTs), где Ts – период квантования, а затем эквивалентные собственные частоты и коэффициенты демпфирования.
Пример 2.6. Расчет собственных частот и коэффициентов демпфирования непрерывной системы с ПФ Ф(s):
>> [W6,Q6]= damp(f)
| W6 = 0.5474 1.4289 3.5952 3.5952 19.5359 24.2728 24.2728 | Q6 = 1.0000 1.0000 0.7387 0.7387 1.0000 0.1134 0.1134 |
Задание 2.6.Вычислите эквивалентные значения полюсов, собственных частот и коэффициентов демпфирования дискретной системы с ПФ Т(z).
Кроме рассмотренных выше функций расчета динамических параметров имеется еще одна полезная функция dcgain, которая используется для вычисления коэффициента передачи lti-модели sys:
k= dcgain(sys).
Пример 2.7. Определение коэффициента передачи замкнутой САУ, заданной ПФ Ф(s):
>> k7= dcgain(f)
k7 = 9.9690
Задание 2.7.Вычислите коэффициент передачи дискретной системы с ПФ Т(z).
Дата добавления: 2016-01-18; просмотров: 877;