Рабочие органы манипуляторов
Рабочие органы манипуляторов служат для непосредственного взаимодействия с объектами внешней среды и делятся на захватные устройства и специальный инструмент. Рабочие органы могут быть постоянными и съемными, в том числе с возможностью их автоматической замены в ходе выполнения технологической операции.
Захватные устройства.Они предназначены для того, чтобы брать объект, удерживать его в процессе манипулирования и освободить по окончании этого процесса. Существуют следующие основные типы захватных устройств - схваты:
· механические,
· пневматические,
· электромагнитные.
Схваты могут быть нерегулируемыми и регулируемыми. Нерегулируемые схваты требуют дополнительных устройств для съема деталей.
Схват — это механическое захватное устройство, аналог кисти руки человека. Самые простые двухпальцевые схваты напоминают обычные плоскогубцы, снабженные приводом. На рис. 7.8 показана конструкция подобного схвата с пневматическим приводом. В зависимости от объектов манипулирования применяют схваты с 3, 4 и реже с большим числом пальцев. На рис. 7.9 показан пневматический схват с 5 гибкими надувными пальцами. За счет разной жесткости пальцев в сечении при подаче в них сжатого воздуха они изгибаются, захватывая находящиеся в их зоне предметы.
Схваты часто очувствляют с помощью контактных датчиков, датчиков проскальзывания, усилия и дистанционных датчиков (ультразвуковых, оптических и др.), выявляющих предметы вблизи схвата и между его пальцами.
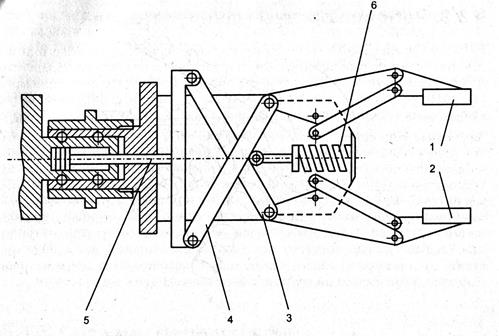
Рис. 7.8. Двухпальцевый схват: 1; 2 — пальцы (губки);
3; 4 — рычажная передача; 5 — шток пневматического двигателя
(пневмоцилиндра); 6 — возвратная пружина

Рис. 7.9. Пневматический схват с 5 гибкими надувными пальцами:
а — внешний вид; б — разрез пальца; I — тонкостенная часть;
2 — гофры; 3 — толстостенная часть; 4 — подвод воздуха;
5 — деформация оси пальца при подаче сжатого воздуха
В наиболее распространенном типе вакуумного захватного устройства использованы вакуумные присоски, которые удерживают объекты за счет разряжения воздуха при его отсосе из полости между присоской и захватываемым объектом. Для захватывания объектов сложной формы применяют вакуумные захватные устройства с несколькими присосками.
Магнитные захватные устройства используются для взятия ферромагнитных объектов. В роботах нашли применение в основном захватные устройства с электромагнитами, но имеются устройства и с
постоянными магнитами. (Для освобождения захваченного предмета они снабжены специальными механическими выталкивателями.)
Захватные устройства бывают универсальными и специальными (для работы с хрупкими и протяженными предметами и т. д.).
Захватные устройства часто присоединяют к последнему звену манипулятора через промежуточные, податливые конструктивные элементы. С их помощью осуществляется компенсация возможных неточностей позиционирования и устраняются возникающие при этом механические напряжения в звеньях манипулятора.
Рабочий инструмент.В случаях, когда объектом манипулирования является рабочий инструмент, с помощью которого робот выполняет основные технологические операции (нанесение покрытий, сварка, завинчивание гаек, зачистка поверхностей и т. п.), как правило, не берется захватным устройством, а непосредственно крепится к манипулятору вместо него. Часто при этом к инструменту необходимо обеспечить подвод энергии или какого-либо рабочего тела. Для окрасочного робота — это краска и воздух к пульверизатору, для сварочного робота — сварочный ток к сварочным клещам при точечной сварке или проволочный электрод, газ и охлаждающая вода при дуговой сварке и т. д. Для этого требуется разработка специальной конструкции всего манипулятора.
Контрольные вопросы:
1. Что такое манипулятор?
2. Какое минимальное число переносных степеней подвижности должен иметь робот?
3. В каких системах координат могут работать промышленные роботы?
4. Какие формы рабочих зон у роботов?
5. Какие манипуляторы называются антропоформными?
6. Какую кинематическую схему соединения звеньев использует платформа Стюарта?
7. Какие предельные варианты расположения приводов у манипуляторах?
8. Приведите примеры кинематических схем роботов с управляемой деформацией.
9. Какие основные типы захватных устройств используют промышленные роботы?
10. Какой недостаток нерегулируемого схвата?
11. На какие группы делятся захватные устройства по степени универсальности?
Лекция №12
Дата добавления: 2016-01-18; просмотров: 3300;