Релейные характеристики электромагнитов
Релейной называют характеристику, в которой изменение входной величины ведёт к скачкообразному изменению выходной величины.
Рассмотрим РХ контактных систем. Пусть y = f(x)
 Y Y
Y Y
 0 Xотл Xcp X
0 Xотл Xcp X
0 Xотл Хср Х
Для РХ бесконтактных систем характерно изменение «Y» от Ymin до Ymax. Y=0 возможен только в идеале.
 Y
Y
Ymax соответствие
Ymin
Х

Y Y
M
Смещение релейной петли
на ось ординат
N

-X +X
Относительную ширину релейной петли характеризует Кв:
 .
.
В релейный устройствах защиты стремятся к Кв = 1.
8.3 Тяговые и механические характеристики электромагнитов «-I»
Тяговая характеристика – зависимость от электромагнитного усилия между якорем и сердечником.
Механическая характеристика – зависимость механических сил, приведённых к зазору между якорем и сердечником, от величины этого зазора. Тяговая характеристика:
 , (10)
, (10)
где  ;
;  – сечение воздушного зазора, м2; δ – воздушный зазор, м; I – ток, А; W – число витков обмотки электромагнита.
– сечение воздушного зазора, м2; δ – воздушный зазор, м; I – ток, А; W – число витков обмотки электромагнита.
Для электромагнита клапанного типа:
 Pэ
Pэ
(IW)2>(IW)1
Pэmax (IW)2
(IW)1
 δмин δ0 δ
δмин δ0 δ
Рисунок 21 – Тяговые характеристики электромагнита на срабатывание (IW)2 и отпускание (IW)1:
δ0 – начальный зазор; δ – текущий (промежуточный) зазор. δмин – минимальный зазор

δ→δмин
-I δ
Теоретически Рэ = f(δ) при δ < δмин уходит в бесконечность, однако реально она достигает только Рэ.maxиз-за насыщения стали сердечника при малых возд. зазорах. Из-за остаточного магнетизма в стали сердечника якорь, после снятия сигнала с обмотки сердечника, может не «отлипнуть» т.е. останется притянутым к сердечнику, поэтому минимальный зазор регулируется с помощью штифта отлипания.
Механическая характеристика:
 Pм
Pм
0 δмин δо δ
Рисунок 22 – Совмещенная механическая характеристика электромагнита
Составлена из суммы характеристик возвратной пружины ВП и характеристик контактных пружин нормального открытого и нормального закрытого контактов.
Тяговая и механическая характеристика должны быть согласованы. Согласно рисунку ниже они должны пересекаться в точках 1 и 2.
 Рэ
Рэ
Рм (IW)cр
(IW)отп
Удачное согласование
0 δмин δо
Рисунок 23 – Удачное согласование характеристик: (IW)cр – тяговая характеристика при токе срабатывания
(IW)отп – то же, но при токе отпускания
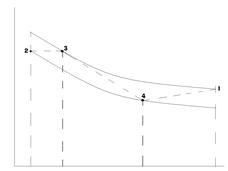 Pэ Рм
Pэ Рм
Неудачное согласование!!!
0 δмин δ3 δ4 δо
Рисунок 24 – Неудачное согласование характеристик
В точках 3 и 4 наблюдается равновесие Рэ и Рм, поэтому якорь в точках 3 и 4 может как бы «застрять», т.е. работать неустойчиво.
Для электромагнитов с вращающимся и втягивающимся якорем в качестве тяговой выступает характеристика:
 f(α), F= f(α),
f(α), F= f(α),
где М – момент силы; α – угол поворота якоря.
 |
1 – вращающийся якорь
2 – втягивающийся якорь
Рисунок 25 – Тяговая характеристика электромагнита с вращающимся (M) и втягивающимся якорем (F)
8.4 Особенности электромагнитов «~» тока
1. На «~» I в стали магнитопроводе создаётся потери, вызываемые вихревыми токами и гистерезисом. Для уменьшения потерь электромагнит выполняют из электротехнической стали.
Потери в стали:
Рст = Руд∙ f 1,3 ∙Вмакс∙ Gст, (11)
где Руд – удельные потеримв стали данной марки и сечения,Вт; Bмакс – амплитудное значение индукции, тесла; Gст – масса магнитопровода, кг; f – частота тока
(отметить влияние петли гистерезиса на потери в стали!!!)
2. Ток в обмотке зависит главным образом от её индуктивного сопротивления, тяговой характеристики и от способа включения обмотки.
Тяговое усилие электромагнита «~» тока примерно вдвое меньше, чем у электромагнита «-» тока при одинаковых условиях включения.
Если обмотка электромагнита включается последовательно с какой-либо нагрузкой, определяющей ток обмотки, то при U = const тяговое усилие почти не зависит от величины «δ» и практически постоянно. Поэтому «δ» может быть для электромагнита «~» тока относительно большим.
Рэ=Рэ ср(1-cos2ωt). (12)
3. Вибрации якоря, поскольку Рэ складывается из двух составляющих: переменной и постоянной. Первая изменяется с двойной частотой и зависит от времени. Уменьшение Рэ при переходе тока через нуль вызывает вибрации, поскольку Рэ то меньше, то больше момента возвратной пружины.
Способы устранения вибрации:
1. Двухобмоточный сердечник, у которого одна обмотка подключена к индуктивности, другая – к ёмкости, в результате чего усилие Рэ не зависит от «t»
Рисунок 26 – Подключение двух обмоток на сердечник электромагнита
Создаётся сдвиг фаз токов в индуктивности и емкости во времени. Результирующий ток не равен нулю в любой момент времени.
2. Короткозамкнутый виток.
Рисунок 27 – Короткозамкнутые витки на сердечнике
Один из полюсов сердечника расщепляется и большую его часть охватывает КЗР виток.
Результат: поток «Ф» расщепляется на Фа и Фв, сдвинутые по фазе во времени и одновременно не могут быть равны нулю.
Дата добавления: 2016-01-16; просмотров: 1775;