Классификация зажимных механизмов
Зажимные механизмы приспособлений делят на простые и комбинированные. К простым (или элементарным) механизмам относятся: винтовые, клиновые, эксцентриковые, рычажные, шарнирно-рычажные, пружинные. Комбинированные состоят из двух–тpex сблокированных последовательно простых приспособлений. По числу точек приложения силы зажима механизмы делят на единичные и многократные (многозвенные). Многократные механизмы зажимают одну деталь по нескольким точкам или несколько деталей одновременно и с равными силами.
По степени механизации зажимные механизмы делят на:
1) ручные – требующие применения мускульной силы и утомляющие рабочего; их применяют в единичном и мелкосерийном производствах;
2) механизированные – работающие от силового привода, в связи с этим их нередко называют механизмами-усилителями; их применяют в серийном и массовом производствах;
3) автоматизированные – приводящиеся в действие перемещающимися частями станков, силами резания или центробежными силами вращающихся масс; осуществляют зажим и раскрепление заготовки без участия рабочего; их применяют в крупносерийном и массовом производствах.
При конструировании приспособления всегда возникает задача по известной силе зажима Q установить тип и основные размеры зажимного устройства и определить силу, развиваемую приводом. Для любого зажимного механизма можно записать уравнения сил и перемещений:
где: W, Sw – сила и перемещение, передаваемые от силового привода зажимному механизму;
i, iп – передаточные отношения сил и перемещений, характеризующие конструктивные параметры механизма;
SQ – перемещение (ход) исполнительного звена механизма.
Передаточные отношения комбинированных механизмов определяют как произведение входящих в них простых:
 (2.69)
(2.69)
Уравнения для таких механизмов принимают вид
 (2.70)
(2.70)
где: n – число простых механизмов, входящих в комбинированный.
Для правильного выбора типа зажимного механизма и расчета его конструктивных параметров необходимо для всех разновидностей механизмов иметь развернутые уравнения, для этого определяют передаточные отношения каждого механизма через его конструктивно-размерные параметры.
Винтовые механизмы
Винтовые механизмы широко используют в приспособлениях с ручным закреплением заготовок, с механизированным приводом, а также на автоматических линиях при использовании приспособлений-спутников. Достоинством их является простота конструкции, невысокая стоимость и высокая надежность в работе.
Винтовые механизмы используют как для непосредственного зажима, так и в сочетании с другими механизмами. Непосредственный зажим осуществляется либо винтом при неподвижной резьбовой втулке, либо гайкой при неподвижной шпильке (рисунке 2.36 – схемы винтовых зажимов). Силу на рукоятке, необходимую для создания силы зажима Q, можно рассчитать по следующей формуле (2.71):
 (2.71)
(2.71)
где: rср – средний радиус резьбы, мм;·
l- вылет ключа, мм;
α - угол подъема резьбы;
φ1 – угол трения в резьбовой паре.
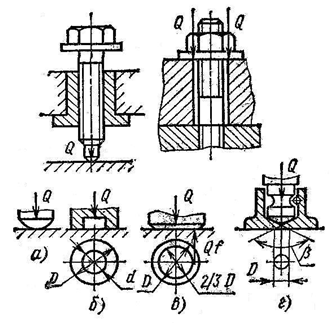
Рисунок 2.36 - Схемы винтовых зажимов
При расчете силы, развиваемой винтовым зажимом, необходимо учитывать дополнительные потери на трение в месте контакта винта (гайки) с заготовкой. Условие равновесия винта (гайки) в этом случае можно записать в следующем виде:
 (2.72)
(2.72)
где: Мтр – момент трения на опорном торце винта (гайки).
Величина МТР зависит от конструкции пяты зажимного винта. На рисунке 2.36 – схемы винтовых зажимов, приведены варианты конструкций пят зажимных винтов.
Для винтов со сферической пятой (рисунок 2.36, а – схемы винтовых зажимов)
МТР ≈0
так как, винт с заготовкой контактируют в точке.
Для винтов с пятой (рисунок 2.36, б - схемы винтовых зажимов ) и для зажима гайкой
 (2.73)
(2.73)
Для винтов с плоской пятой (рисунок 2.36, б - схемы винтовых зажимов)
 (2.74)
(2.74)
Для винтов с неподвижным наконечником (рисунок 2.36, г - схемы винтовых зажимов)
 (2.75)
(2.75)
В формулах f – коэффициент трения пяты винта по поверхности заготовки (наконечника).
Для расчета силы зажима Q винтового зажима необходимо в условие равновесия ввести соответствующее конструкции значение Мтр из формул (2.73 – 2.75).
Дата добавления: 2016-01-03; просмотров: 5687;