Клиновые зажимные механизмы
Клин очень широко используют в зажимных механизмах приспособлений, этим обеспечивается простота и компактность конструкции, надежность в работе. Клин может быть как простым зажимным элементом, действующим непосредственно на заготовку, так и входить в сочетание с любым другим простым при создании комбинированных механизмов.
Назначение клиновых механизмов: увеличение исходной силы привода, перемену направления исходной силы, самоторможение механизма (способность сохранять силу зажима Q при прекращении действия силы W, создаваемой приводом). Если клиновой механизм применяют для перемены направления силы зажима, то угол клина обычно равен 45º, а если для увеличения силы зажима или повышения надежности, то угол клина принимают равным 6 – 15º (углы самоторможения).
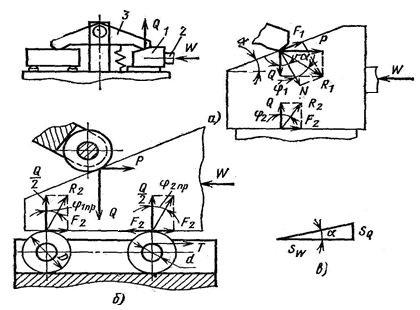
Рисунок 2.37 - Схема механизма с плоским односкосым клином и силы, действующие на клин
Клин применяют в следующих конструктивных вариантах зажимов:
а) механизмы с плоским односкосым клином (рисунок 2.37);
б) многоклиновые (многоплунжерные) механизмы (рисунок 2.38);
в) эксцентрики (механизмы с криволинейным клином) (рисунок 2.39);
г) торцовые кулачки (механизмы с цилиндрическим клином) (рис. 2.40).
На рисунке 2.37 представлена схема механизма с плоским односкосым клином и силы, действующие на клин приведена схема комбинированного зажима. Он образован последовательным соединением плоского односкосого клина 1, на который действует через шток 2 привода сила W, и рычажного зажима 3, передающего на заготовку силу зажима Q.
При зажиме заготовки клин под действием силы W движется влево, поворачивая рычаг вокруг оси вращения. При движении клина на его плоскостях возникают нормальные силы Q и N и силы трения F1 и F2 (Рисунок 2.37, а - Схема механизма с плоским односкосым клином и силы, действующие на клин), причем
 (2.76)
(2.76)
где: φ1 и φ2, f1 и f2 – углы и коэффициенты трения на соответствующих поверхностях клина.
В конечном положении, когда заготовка зажата, клин находится в равновесии.
Рассмотрим равновесие клина под действием всех приложенных к нему сил. Для этого равнодействующую R1 сил N и F1 разложим на силы Q и Р. Так как в зажатом состоянии клин находится в равновесии, то вертикальная составляющая по величине равна Q. Горизонтальная составляющая Р из силового многоугольника равна
 (2.77)
(2.77)
Сумма проекций всех сил на направление силы W
 (2.78)
(2.78)
откуда.
 (2.79)
(2.79)
Если трение существует только на наклонной поверхности клина, т.е. закрепляемая заготовка перемещается вместе с клином в направлении действия силы W, то tgφ2 = 0 и  Усилие, развиваемое односкосым клином
Усилие, развиваемое односкосым клином  (2.80)
(2.80)
Существенным недостатком рассмотренного механизма является низкий коэффициент полезного действия (КПД), т.е. большие потери на трение, резко увеличивающиеся с уменьшением угла клина. В таблице 2.1 - Значение потерь на трение и силы W в зависимости от различных углов клина a, приведены потери на трение в клиновом механизме в зависимости от угла клина α.
Таблица 2.1 - Значение потерь на трение и силы W в зависимости от различных углов клина a.
| a, град | W, доли от Q | Потери на трение, % | |
| Без учета сил трения | С учетом сил трения | ||
| 0,087 0,37 | 0,29 0,59 1,25 |
Для повышения КПД клинового механизма на поверхностях клина трение скольжения заменяют трением качения, применяя опорные ролики (Рисунок 2.37, б - Схема механизма с плоским односкосым клином и силы, действующие на клин). Схема действующих сил принципиально ничем не отличается от механизма с плоским односкосым клином без роликов, поэтому для расчета этого механизма вполне можно применить формулу, заменив углы трения скольжения φ1 и φ2 на приведенные углы трения качения φ1 ПР и φ2 ПР:
 (2.81)
(2.81)
Углы φ1 ПР и φ2 ПР углы с трением качения можно определить, рассмотрев равновесие роликов. Рассмотрим равновесие нижнего ролика, приравняв нулю сумму моментов всех сил относительно оси ролика:
 (2.82)
(2.82)
где:  - сила трения качения между роликом и клином;
- сила трения качения между роликом и клином;
 – сила трения скольжения между роликом и осью, отсюда
– сила трения скольжения между роликом и осью, отсюда
 (2.83)
(2.83)
или
 (2.84)
(2.84)
Соответственно для верхнего ролика  В конструкциях с роликами потери на трение снижаются, а сила зажима возрастает на 30-50% по сравнению с клином без роликов.
В конструкциях с роликами потери на трение снижаются, а сила зажима возрастает на 30-50% по сравнению с клином без роликов.
Уравнение перемещений рассматриваемых механизмов (Рисунок 2.37, в - Схема механизма с плоским односкосым клином и силы, действующие на клин)
 (2.85)
(2.85)
Дата добавления: 2016-01-03; просмотров: 5113;