Целевые задачи мехатроники
Целевой задачей мехатроники является проектирование и производство качественно новых модулей и движущихся машин. Фундаментальное понятие «качество машины» было введено в обиход российскими учеными. Качество машины оценивается совокупностью специально подобранных показателей (критериев), выбор которых определяется его служебным (функциональным) назначением.
К числу современных требований к функциональным и техническим показателям модулей и машин относятся:
1 – выполнение машинами и системами качественно новых служебных и функциональных задач;
2 – сверхвысокие скорости движения рабочего органа с одновременно высокой точностью позиционирования и мягкостью;
3 – ультрапрецизионные движения модулей вплоть до микро- и нанотехнологий;
4 – компактность модулей и движущихся систем;
5 – новые кинематические структуры и конструктивные компоновки многокоординатных машин;
6 – интеллектуальное поведение систем, функционирующих в меняющихся и неопределенных внешних средах;
7 – выполнение пространственных движений по криволинейным траекториям и реализация сложных законов перемещения во времени.
1. Примером выполнения МУ новых служебных функций является применение мобильных роботов для инспекции и ремонта подземных трубопроводов. Особое значение имеют МС, функционирующие в условиях несовместимых с жизнедеятельностью человека либо опасных для его здоровья. Например, ликвидация последствий аварий на АЭС (Чернобыль). Другой пример, для предотвращения и ликвидации террористических операций необходимы МУ для инспекционных проверок и обезвреживания взрывных устройств, видеоразведки объектов и территорий, осмотр днищ, салонов и багажных отделений автомашин, обнаружение и ликвидация взрывчатых веществ.
2. Сверхвысокие скорости применения рабочих органов обрабатывающих станков решают три задачи:
Ø повышение производительности механообработки;
Ø улучшение качества поверхности обрабатываемых деталей;
Ø повышение точности обработки.
Примеры.
Прецизионные электрошпиндельные узлы, в которых объединены в единый конструктивный модуль опоры шпинделя, активные части двигателя, датчики информационных утройств. Скорость вращения этого электрошпиндельного МУ – 100 000 об/мин. Автоматический контроль состояния узла и параметров его движения (скорости, угла поворота и развиваемого момента) в процессе обработки обеспечивает заданный технологический режим с высоким качеством обработки.
3. Прецизионность (или сверхвысокая точность) перемещений конечного звена МУ – важнейшее требование к современным МС. Высокая точность позиционирования рабочих органов МС осуществляется с помощью линейных двигателей. Статор линейных двигателей закреплен на станке, а ротор – на перемещающейся детали. Точностные параметры линейного двигателя обеспечиваются применением высокоэрцитивных магнитов, а также управляющими измерительными устройствами МС. Ротор состоит из ряда прямоугольных постоянных магнитов и изготовлены из редкоземельных материалов.
4. Компактность модулей и движущихся систем. Требования к массогабаритным характеристикам иногда являются превалирующим требованием при создании МС. Предлагается три подхода к проектированию мехатронных модулей:
Ø замена электромеханических устройств на мехатронные модули движения, что исключает многоступенчатые модули движения, что исключает многоступенчатые кинематические цепи от двигателя до рабочего органа (например, МУ на основе линейных двигателей);
Ø конструктивное объединение в едином корпусе всех основных приводов элементов (примером могут служить авиационные электрические механизмы – бустеры, объединяющие в одном корпусе малогабаритный электродвигатель, планетарный редуктор, рабочие органы и датчики обратной связи (концевые выключатели);
Ø синергетическая интеграция позволяет исключить промежуточные блоки и интерфейсы и получать ультракомпактные конструкции.
5 – Новые кинематические структуры. Проблема выбора кинематической структуры МС является важной задачей при концептуальном проектировании и усложняется неоднозначностью выбора координатных базисов программирования исполнения движения рабочего органа и промежуточных звеньев кинематических цепей. Поэтому один из мехатронных способов создания машин с качественно новыми свойствами состоит в поиске нетрадиционных координатных базисов, оптимальных для поставленных функциональных задач.
6 – Интеллектуальное поведение систем. Главной чертой интеллектуальных систем управления является использование информационных технологий обработки знаний и управление на основе анализа внешних событий и ситуаций. Поэтому эти системы не обладают «интеллектом» в общепринятом смысле. Их свойства соответствуют пониманию латинского слова intelligent, что означает «разумны», «понимающий», «смышленый».
Архитектура любой интеллектуальной системы содержит следующие блоки:
Ø базу знаний с развитыми механизмами вывода;
Ø интеллектуальный решатель задач;
Ø интеллектуальный планировщик задач;
Ø систему объяснений;
Ø интерфейс с пользователем.
Интеллектуальная система обладает следующими функциональными возможностями:
Ø автономность и гибкость при планировании и исполнении движений с минимальным взаимодействием с оператором;
Ø адаптация и оптимизация исполнительных операций при любых внешних возмущениях;
Ø автоматический контроль и диагностика собственного состояния для надежной и безопасной работы.
7 – Пространственные движения по криволинейным траекториям. Движения многомерной мехатронной системы (МС) условно можно разделить на два: движение в пространстве и во времени.
Законы пространственного перемещения всех звеньев МС определяются технологической постановкой желаемого движения рабочего органа. Форма траектории рабочего органа определяется геометрией объекта работ, инструментом и технологией выполнения операций.
Закон движения во времени исполнительных приводов определяется как желаемым законом перемещения рабочего органа, так и кинематикой многомерной системы. В задачах автоматизированного машиностроения обычно задается простой профиль скорости рабочего органа. Например, при операции лазерной резки и окраски изделий требуется постоянная скорость по контуру рабочей поверхности. В МС с нелинейным базисом этот простой закон потребует движения исполнительных приводов по сложным законам.
Основное отличие мехатроники от робототехники заключается в классификационных признаках. Мехатроника изучает новый методологический подход к созданию модулей и машин с качественно новыми характеристиками. Роботы – это один из современных классов машин с компьютерным управлением движений. Мехатронный подход охватывает все основные фазы жизненного цикла машины (проектирование, производство, эксплуатация), а иногда требует привлечения других методологических подходов: методов технической кибернетики, бионики и САПР.
Современное проектирование МС основано на модульных принципах и технологиях. Из фундаментального словаря: «Модуль» – это унифицированная функциональная часть машины, конструктивно оформленная, как самостоятельное издание. Как правило ММ выполняют движения по одной координате (вращательной или поступательной), реже имеют две степени подвижности.
Мехатронные модули делятся на три группы:
Ø модули движения;
Ø мехатронные модули движения;
Ø интеллектуальные мехатронные модули.
Модуль движения – конструктивно и функционально самостоятельное изделие, в котором конструктивно объединены управляемый двигатель и механическое устройство. Главное отличие – использование вала двигателя в качестве одного из элементов механического преобразования движения.
Мехатронные модули движения – конструктивно и функционально самостоятельное изделие, включающее в себя управляемый двигатель, механическое и информационное устройства. Информационные устройства содержат датчики обратной связи, информации и электронные блоки для обработки и преобразования сигналов. Например, фотоимпульсные датчики (инкодеры), дающие информацию о скорости движения и об угловом перемещении, оптические линейки, вращающиеся трансформаторы т.д.
Интеллектуальный мехатронный модуль – конструктивно и функционально самостоятельное изделие, содержащее синергетическую интеграцию двигательной, механической, информационной, электронной и управляющей частей. Например, цифровые вычислительные устройства (микропроцессоры, сигнальные процессоры), электронные силовые преобразователи, компьютерные устройства сопряжения и связи.
Первая и вторая группа являются объекта ми серийного производства, третья группа появилась на рынке сравнительно недавно. В полной мере определению мехатронике соответствует только третья группа, содержащая все три определяющие подсистемы.
Лекция 4.
2.6. Модульный принцип создания МС
Мехатронные машины – это интеллектуальные многомерные системы, построенные на мехатронных принципах и технологиях и работающие в изменяющихся условиях внешней среды. ММ содержат два и более мехатронных модуля.
Внешнюю среду ММ можно разделить на две
Ø детерминированную, когда параметры возмущенных воздействий заранее можно определить с необходимой точностью;
Ø недетерминированную, когда внешние воздействия по своей природе являются заранее неопределенными (например, экстремальные подводные, подземные и космические среды).
В состав ММ входят четыре части:
1. механическое устройство с конечным звеном рабочего органа;
2. блок приводов, включающий силовые преобразователи и исполнительные двигатели;
3. устройство компьютерного управления, на вход которого подаются команды ЭВМ верхнего уровня или от человека-оператора;
4. информационное устройство, служащее для получения и передачи в устройство компьютерного управления данных о реальном перемещении машины и о состоянии ее подсистем.
Механическое устройство представляет собой многозвенный механизм, кинематическую цепь которого образуют движущиеся звенья (кинематические пары). Конечное звено – рабочий орган. Механическое устройство и двигатели объединены в группу исполнительных устройств.
По числу степеней подвижности  механические устройства делятся на:
механические устройства делятся на:
Ø специализированные устройства  ;
;
Ø универсальные устройства  ;
;
Ø избыточные устройства  .
.
Специализированные устройства по сравнению с универсальными имеют ограниченные кинематические возможности и проектируются под конкретную задачу.
Универсальные устройства обеспечивают в декартовом пространстве перемещение рабочего органа как твердого тела с 6 степенями свободы.
Избыточные механизмы самые сложные и дорогостоящие. Их применяют, когда требуется оптимизировать конфигурацию цепи в средах с препятствиями.
Рабочий орган мехатронной машины – это составная часть МУ для непосредственного выполнения технологических операций. В свою очередь рабочий орган может состоять из нескольких элементов (модулей) и иметь несколько степеней подвижности. Например: мотор-шпиндель.
Рабочая зона машины – совокупность всех точек декартового пространства, которые достигнуты рабочим органом машины.
Погрешность позицирования – отклонение положения рабочего органа от желаемого, заданного программой движения. Эти отклонения – случайные величины и представляют собой сферу, центр которой является координатой целевой точки, а радиус равен паспортной величине погрешности позиционирования машины.
 Погрешность отработки траектории – аналогичена погрешности позиционорования. Рабочий орган МС находится внутри пространственной трубки, ось которой есть программная траектория. Радиус трубки равен паспортной погрешности обработки траектории.
Погрешность отработки траектории – аналогичена погрешности позиционорования. Рабочий орган МС находится внутри пространственной трубки, ось которой есть программная траектория. Радиус трубки равен паспортной погрешности обработки траектории.
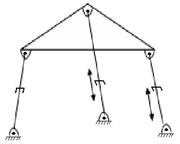
Машины МПК. Одним из наиболее перспективных и эффективных путей уменьшения погрешностей позиционирования рабочего органа является создание МПК[4]. В основе их конструкции обычно лежит платформа Стюарта. МПК имеет основание и подвижную платформу, соединенную подвижными стержнями управляемой длины. Шарниры стержней имеют не менее двух степеней подвижности. На подвижной платформе крепится рабочий орган. Изменяя длины стержней, управляют перемещением и ориентацией подвижной платформы.
Для МС, где требуется управление пространственным движением по шести степеням свободы, необходимо соответственно шесть стержней (они называются «гексаподы», гекса – шесть). Если управляемых стержней три, то это «трипод».
Преимущества МС с параллельной кинематикой:
Ø высокая точность исполнения движения;
Ø высокие скорости и ускорения рабочего органа;
Ø отсутствие традиционных направляющих.
Несущими элементами являются сами исполнительные механизмы, поэтому имеем улучшенные массо-габаритные параметры и низкую материалоемкость:
Ø высокая степень унификации мехатронных модулей.
Повышенная прецизионность МПК обеспечивается следующими факторами:
1. В МС с МПК не происходит суперпозиций (наложения) погрешностей звеньев при переходе от базы к рабочему органу.
2. Стержневые механизмы МПК обладают высокой жесткостью, так как двухстепенные шарниры крепления стержней не подвержены изгибающим моментам. Они работают только на растяжение-сжатие.
3. Применяются прецизиозные датчики обратной связи и измерительные системы лазерные и компьютерные методы коррекции перемещений рабочего органа.
Имея высокую точность позиционирования, МПК могут применяться как обрабатывающее оборудование на станках, так и в качестве измерительных машин.
Например, трипод-сканер для измерения размерностей или копиры. Полученная цифровая информация от копира о геометрии эталонного образца передается в CAD/CAM-систему для автоматического производства копий.
Обобщенными координатами для МПК принимают длины управляющих стержней (их называют  - координатами). Координатные оси БИД МПК пересекаются под произвольными углами.
- координатами). Координатные оси БИД МПК пересекаются под произвольными углами.
В МС нового поколения для осуществления больших перемещений применяем комбинацию последовательной и параллельной структурных кинематических цепей. Например, комплекс для обработки крупногабаритных пресс-форм, имеют для глобальных перемещений декартовые направляющие и модуль с МПК (трипод или гексапод) для осуществления точных локальных движений.
МС с гибридными структурами кинематических цепей присуща нелинейность между показателями качества машины (точностью, материалоемкостью,
максимальной скоростью, габаритами, производительностью и ценой). Нелинейность этих взаимосвязей означает, что для повышения, например, точности движения нет необходимости увеличивать массогабаритные параметры, а просто незначительным изменением одних параметров можно скачкообразно добиться изменения критерия качества. Поэтому одним из мехатронных способов создания машин с качественно новыми свойствами является поиск нетрадиционных координатных базисов, оптимальных для поставленных функциональных задач.
Дата добавления: 2015-12-22; просмотров: 1435;