Електроприводи підрулюючих пристроїв 4 страница
Тиск на стороні нагнітання компресора регулюється автоматичним клапаном К7.
Танки ПБ і ЛБ даної системи постійно зв'язані між собою. Їх первинне заповнення або осушення проводиться судновим баластним насосом.
Система відкренювання може бути використана для визначення метацентричної висоти судна.
В цьому випадку після вирівнювання води в танках проводять повне перекачування на будь-який борт. Зареєстрована зміна кута крену Δθ і відомий момент M  (кН*м) заповненої цистерни, що кренить, при поточному значенні водотоннажності судна Δ дозволяють по відповідних діаграмах знайти метацентричну висоту h.
(кН*м) заповненої цистерни, що кренить, при поточному значенні водотоннажності судна Δ дозволяють по відповідних діаграмах знайти метацентричну висоту h.
Приблизно її значення може бути визначене по наступній формулі:
h =  . ( 18 )
. ( 18 )
§ 5.3. Системи автоматизації відкренювання
Узагальнена структурна схема автоматичного відкренювання приведена на рис. 17.
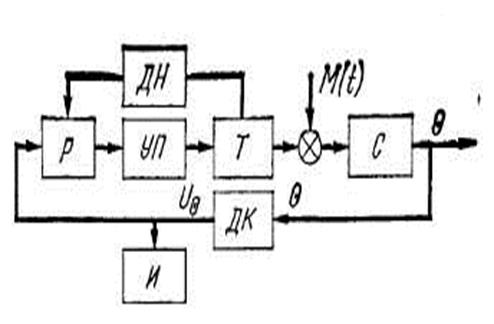
Рис. 17. Узагальнена структурна схема автоматичного відкренювання
Загальна структура системи автоматичного відкренювання принципово не залежить від використовуваного способу примусового перекачування води між бортовими цистернами.
При появі крену судна (С), датчик крену (ДК) подає еквівалентна напруга на регулятор Р, який через систему управління перекачуванням УП проводить переміщення води між бортовими цистернами Т
Граничні рівні води в танках реєструються датчиками наповнення ДН, які при спрацьовуванні припиняють перекачування і включають сигналізацію.
Розривом контура зворотного зв'язку система може бути переведена в режим ручного управління. В цьому випадку контроль кута крену здійснюється візуально по вимірювальних приладах - кренометрам.
Елементи системи автоматичного управління відкренюванням, що реалізовуються на судах, мають наступні особливості.
Датчик кута крену ДК є перетворювачем кутової координати або регульованої величини і в пропорційну напругу U  . Застосовуються два типи датчиків: індуктивні і ватерпаси.
. Застосовуються два типи датчиків: індуктивні і ватерпаси.
1. індуктивні датчики.
Чутливим елементом тут є маятник, який безпосередньо воз-
діє на сердечник перетворювача. Переміщення сердечника механічно обмежене і складає 3.5 мм в кожну сторону. Тому датчики цього типу не використовуються в схемах вимірювання кута крену при його зміні в широкому діапазоні.
2. датчики ватерпасів .
Чутливий елемент такого датчика представляється у вигляді зігнутої скляної трубки, заповненою рідиною. Зміна положення трубки, пов'язана з креном, викликає зсув повітряної бульбашки усередині трубки, що порушує симетрію освітленості двох фотоелементів і приводить в дію компенсаційну схему вимірювань.
Остання включає фазочутливий підсилювач, серводвигун і резистор потенціометра.
Працюючий серводвигун повертає в необхідну сторону вимірювальну трубку до відновлення рівної освітленості фотоелементів. Кут повороту і є кут крену.
Одночасно повертається движок резистора потенціометра, що перетворює поворот в еквівалентний електричний параметр. Характеристика даного датчика лінійна в широкому діапазоні зміни кутів, Датчик одночасно використовується в системі регулювання і для інформації про положення судна.
Датчики наповнення танків ДН.
Для реєстрації граничних станів (повне заповнення, цистерна порожня) широко використовуються релейні датчики рівня типу поплавця.
Для цілей вимірювання ступеня заповнення цистерни поширеніші ємкісні датчики з мостиковою вимірювальною схемою і операційними підсилювачами.
Датчики такого вигляду в деяких системах відкренювання використовуються і для характеристики фіксованих проміжних або граничних станів.
Регулятор Р.
Враховуючи велику інерційність об'єкту, в системі відкренювання використовують регулятори релейного типу.
Регулятори мають зовнішні задаючі органи зміни кутових уставок включення і відключення системи відкренювання, чим визначається зона нечутливості автоматизованої схеми, а також елементи завдання максимальних кутів крену, в діапазоні яких забезпечується нормальне протікання процесу регулювання.
Як регулятори широко застосовуються МІКРОЕОМ, що виконують роль дискретного пристрою, що управляє. При цьому ЕОМ формує не тільки робочий сигнал, що управляє, але і видає необхідну інформацію про стан робочих параметрів системи: напрям перекачування, наповнення або осушення цистерни, максимальний кут крену.
Потужність виконавчого двигуна.
За наявності робочих характеристик насоса або компресора оцінка потужності ИД для системи відкренювання може бути знайдена по звичайних формулах для розрахунку потужності суднових нагнітачів:
а ) потужність (кВт) електродвигуна насоса
Р = kз γ Q H / ( 1000ηпηн ) ( 19 ),
де kз – коефіцієнт запасу (1,1…1,4); γ – щільність рідини (для холодної води γ = 9810 Н / м3 ); Q – подача насоса, м3 /с ( кубічний метр в секунду ); H – напор насоса, м; ηп - коефіцієнт корисної дії передачі ( якщо електродвигун і насос з’єднані без передачі, то ηп = 1 ); ηн – коефіцієнт корисної дії насоса( для центробіжних насосів з тиском більшим, чим 39000 Па, ηн = 0,6...0,75; з тиском меншим, чим 39000 Па, ηн = 0,3...0,6 ).
Краще всього визначати ККД насоса за даними каталога.
б) потужність (кВт) електродвигуна поршневого компресора
Р = kз Q В / ( 1000ηпηк ) ( 20 ),
де kз – коефіцієнт запасу ( 1,1...1,2 ); Q – подача
компресора, м3 /с ( кубічний метр в секунду ); В – робота, яка витрачається на стиснення 1м3 повітря до необхідного робочого тиску, Дж / м3 ( див. таблицю 3 ); ηп - коефіцієнт корисної дії передачі; ηк - коефіцієнт корисної дії компресора.
Таблиця 3 .
Робота, яка витрачається на стиснення 1м3 повітря
| № | Кінцевий тиск Р, МПа | Робота на стиснення В, Дж / м3 |
| 0,2 | 716 00 | |
| 0,3 | 117 300 | |
| 0,4 | 152 200 | |
| 0,5 | 179 000 | |
| 0,6 | 203 000 | |
| 0,7 | 224 000 | |
| 0,8 | 242 000 | |
| 0,9 | 263 000 | |
| 1,0 | 273 000 |
Разом з тим потужність ВД може бути знайдена за загальними умовами, пов'язаними з енергетичними показниками роботи по переміщенню води з однієї цистерни в іншу.
Орієнтуючись на створення системою вирівнюючого моменту, еквівалентного моменту обурення, який виникає при вантажних операціях, може бути запропонована наступна формула для визначення потужності (кВт) електроприводу:
Р =  , ( 21 )
, ( 21 )
де Н - максимальна різниця рівнів води в цистернах, практично це висота цистерни, м;
Q – необхідна швидкість заповнення цистерни, м/с;
η - до. п. д. компресора або насоса;
η  - до. п. д., що враховує втрати тиску в трубопроводі, клапанах;
- до. п. д., що враховує втрати тиску в трубопроводі, клапанах;
γ - щільність рідини, кг/м  .
.
Швидкість заповнення цистерни при вирівнюванні знаходиться на підставі загальних технічних характеристик судна, його вантажних засобів і системи відкренювання (м/с):
Q =  ' ( 22 )
' ( 22 )
де m  - максимальна маса одиниці вантажу, що транспортується, т (може прийматися значення, гранично допустиме для вантажної аппарели);
- максимальна маса одиниці вантажу, що транспортується, т (може прийматися значення, гранично допустиме для вантажної аппарели);
R  , R
, R  - плечі центру додатку сил води в цистерні і вантажу щодо діаметральної площини судна, м;
- плечі центру додатку сил води в цистерні і вантажу щодо діаметральної площини судна, м;
Т  - час одиничного відкренювання, задане технічними умовами, с.
- час одиничного відкренювання, задане технічними умовами, с.
Режим роботи виконавчого електродвигуна визначається прийнятим варіантом системи відкренювання.
Спостереження показують, що частота введення системи вирівнювання в дію при автоматичному управлінні доходить для важких вантажів до 40…45 відкренювань за одну годину.
Отже, у варіанті системи з насосом (див. рис. 16, а) електродвигун працює в повторно-короткочасному режимі S4 з частими пусками.
§ 5.4. Система відкренювання фірми « Сименс»
Використана на теплоходах серії «Скульптор Коненков» ( рис. 18 ). Робоча кінематика системи відповідає схемі, показаній на рис. 16, а.
Потужність електродвигуна насоса складає 70 кВт. Силові гідравлічні клапани К1...К6 мають пневматичний привід і управляються за допомогою проміжних електромагнітних золотників.
Особливості елементів схеми
Датчик крену ДК ватерпас з компенсаційною вимірювальною схемою. Датчики наповнення ДН - поплавці, контактні. Розташовуються в танках лівого ТЛ і правого ТП бортів. Характеризують граничні стани наповнення: цистерна заповнена ( 1), цистерна порожня (0).
Аналого-цифровий перетворювач містить зовнішні пристрої введення уставок спрацьовування.
Елементами 8 і 9 можна змінювати ширину петлі гістерезису порогової ланки 7.
Кут включення системи відкренювання в роботу або її чутливість може регулюватися елементом 9 в межах 0,5.5°, а кут відключення - елементом 8 в діапазоні 0.1°.
Елементом 4 встановлюється максимальний кут крену (2,5.10°), досягши якого спрацьовує тривожна сигналізація.
На панелі управління БУ розміщуються: виборчий перемикач режимів управління, кнопки ручного перекачування, логічні перетворювачі сигналів, реле, стабілізатор напруги для живлення логічних елементів.
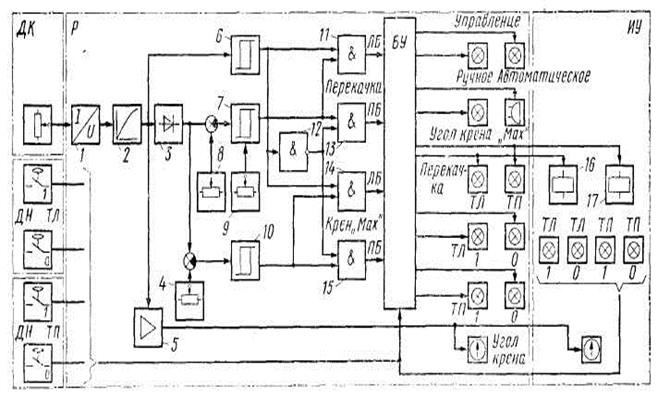
Рис. 18. Функціональна схема автоматичного режиму відкренювання фірми «Сименс»: 1 - опір вторинного навантаження при вимірюванні кута крену; 2 - згладжуючий фільтр; 3 - випрямляч; 4 - елемент зміни установлення максимальних кутів включення сигналізації; 5 - лінійний підсилювач; 6, 7, 10 - порогові логічні елементи; 8, 9 - завдання кутів включення і відключення системи; 11, 13, 14, 15 - логічні елементи «И»; 12 — інверсний логічний елемент; 16, 17 - релейні елементи управління електромагнітами пневмозолотників і пуску виконавчого двигуна
Включення двигуна і електромагнітних золотників управління проводиться одночасно за допомогою реле 16,17. При цьому спалахує сигнальне табло «Перекачування» відповідного борту.
Виконавчий двигун з'єднується з мережею методом прямого включення.
На ходу судна цистерни відкренювання заповнюються водою до певного рівня, табульованого залежно від водотоннажності судна, метацентричної висоти, і служать як пасивні елементи стабілізації хитавиці.
Виконавчий двигун і насос при цьому не працюють, а цистерни клапанами К1...К4 зв'язуються між собою.
§ 5.5. Система відкренювання фірми «Інтерінг»
Експлуатується на теплоходах серії «Магнітогорськ» ( рис. 19 ). Робоча кінематика системи відповідає схемі, показаній на рис. 16, б.
Компресор при тиску 1 МПа ( 10 кгс/см  ) має подачу 1 м/с. Потужність виконавчого двигуна 86 кВт.
) має подачу 1 м/с. Потужність виконавчого двигуна 86 кВт.
Функціональна схема (рис. 19 ) передбачає можливість використання системи в режимах ручного або автоматичного відкренювання, а також в режимі активної стабілізації хитавиці на хвилі.
Блок управління БУ, регулятор Р розміщені в ЦПУ; електропневматичні клапани ЭПК, датчик тиску повітря ДД, електрокомпресор АЧ, повітряні клапани ВК розташовані в окремому ізольованому приміщенні поблизу цистерн.
Є два додаткові пости ПУ1 і ПУ2 з необхідними засобами ин-
формації, які встановлені в приміщенні вантажного бюро і рульовій рубці.
Особливості функціональних ланок.
Блок управління БУ містить пристрої вибору режиму управління, кнопки ручного управління перекачуванням, підсилювальні і порогові елементи ємкісних датчиків наповнення ДН, елементи цифрової логіки, реле.
На відміну від попередньої системи в схемі сигналізації наповнення танків передбачені повідомлення про досягнення рівнів 70 і 100 %.
Блок регулятора Р має три датчики, що характеризують узагальнену координату крену судна:
1. індуктивний маятниковий датчик кута крену, що забезпечує автоматичну роботу системи вирівнювання крену в порту;
2. мембранно-індуктивний датчик ватерпаса для вимірювання кута крену при роботі системи активної стабілізації.
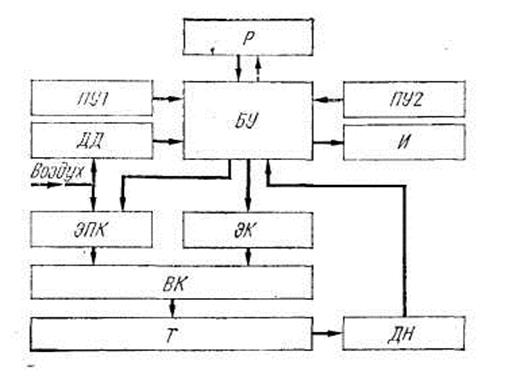
Рис. 19. Функціональна схема відкренювання фірми «Інтерінг»: 1 - регулятор; БУ - блок управління; ПУ1, ПУ2 - пости управління; ДД - датчик тиску повітря в магистралі управління; І - блоки сигналізації і інформації стану системи; ЭПК - пневматичні клапани з електромагнітним управлінням; ЭК— електрокомпресор; ВК - повітряні клапани; Т— танки; ДН — датчики наповнення танків
Датчик є U-образний скляний балон, наполовину заповнений рідиною. Кінці балона зв'язані між собою двома трубками.
У одну з них вбудована чутлива мембрана, механічно сполучена з якірцем індуктивного перетворювача.
При коливанні рівня рідини в U -подібному балоні відбувається зміна тиску повітря на мембрану і вона переміщається на соті долі міліметра.
Індуктивний перетворювач видає еквівалентний електричний сигнал, пропорційний куту крену судна.
У другу трубку, що пов'язує, вбудований клапан, перетин якого відрегульований так, щоб при постійному крені тиск в порожнинах вирівнювався за 3-4 хв. Період хитавиці судна, як відомо, складає 8…12 с, тому наявність клапана мало впливає на точності вимірювання кута.
При несиметричних коливаннях судна, коли тривалість крену на один борт буде більша, ніж на іншій, відбудеться зсув нульового стану рідини в U -подібній трубці, що зумовить появу додаткового сигналу на регуляторі для деякого заповнення цистерни одного борту з метою вирівнювання постійної складової крену і симетрування хитавиці судна.
3. мембранно-індуктивний датчик ватерпаса швидкості кута крену, який використовується в режимі активної стабілізації судна в ходовому режимі.
Його пристрій аналогічно датчику кута.
Клапан, що дроселює, в другій сполучній трубці забезпечує вирівнювання тиску за чверть періоду хитавиці, що настроюється залежно від характеристик судна при введенні його в експлуатацію.
Тому тиску на мембрані і свідчення індуктивного перетворювача будуть еквівалентні похідній від кута бортової хитавиці.
Регулятор має підсилювачі і аналого-цифрові перетворювачі, що забезпечують автоматичну роботу системи у встановленому режимі. Крім того, в його складі є випробувальний прилад, за допомогою якого можна імітувати хитавицю і перевірити якість роботи і стан елементів системи.
Система стабілізації в цьому випадку буде штучним збудником коливань судна.
У схемі стабілізації хитавиці компресор не працює. Сигнал стримування хитавиці подається на клапани К6, К7 (див. мал. 16, би), регулюючі періоди повідомлення кренових цистерн з атмосферою, завдяки чому міняється характер обміну води між цистернами.
Схема управління електроприводом компресора.
Схема управління електроприводом компресора зображена на рис. 20.
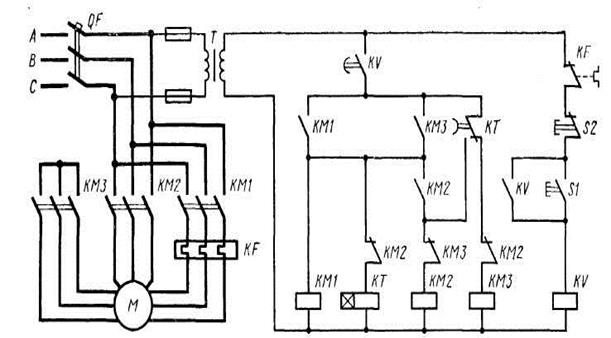
Рис. 20. Схема управління електроприводом компресора в системі відкренювання фірми «Інтерінг»
До основних елементів схеми відносяться ( рис. 20 ):
1. QF - автоматичний вимикач, для захисту двигуна від струмів короткого замикання;
2. М - асинхронний електродвигун ;
3. Т - знижувальний трансформатор, для живлення ланцюгів управління;
4. S1 - кнопка «Пуск»;
5. S2 - кнопка «Стоп»;
6. KV - реле напруги, для захисту двигуна по зниженню напруги;
7. КМ1 - лінійний контактор, для підключення обмотки статора до живлячої мережі;
8. КМ2 - контактор трикутника;
9. КМЗ - контактор нульової точки «зірки»;
10.КТ - реле часу, для створення витримки часу при переході з «зірки» на «трикутник»;KF - теплове реле, для захисту двигуна від струмів перевантаження.
Підготовка схеми до роботи.
Для підготовки схеми до роботи включають автоматичний вимикач QF. При цьому живлення поступає на силову частину схеми і на первинну обмотку трансформатора Т. Схема готова до роботи.
Робота схеми.
Для пуску електродвигуна натискають кнопку S1 «Пуск», після чого схема працює автоматично.
При натисненні кнопки S1 включається реле напруги KV, яка замикає 2 контакти:
1. один контакт шунтує кнопку S1, після чого її можна відпустити;
2. через інший контакт подається живлення на решту частини схеми управління.
При цьому через розмикаючий контакт КТ включається контактор нульової точки «зірки» КМЗ, який :
1. замикає головні контакти в силовій частині схеми, сполучаючи виводи обмотки статора в нульову крапку;
2. замикає допоміжний контакт, через який включаються котушки лінійного контактора КМ1 і реле часу КТ.
В результаті включення контакторів КМ1 і КМЗ відбувається пуск двигуна на «зірці», при цьому пусковий струм двигуна зменшується в 3 рази ( в порівнянні з пусковим струмом на «трикутнику» ).
Крім того, розмикається другий допоміжний контакт КМЗ в ланцюзі котушки контактора «трикутника» КМ2, перешкоджаючи його випадковому включенню, оскільки одночасне включення контакторів КМ2 і КМЗ привело б до короткого замикання в силовій частині схеми.
Допоміжний контакт КМ1 замикається і шунтує допоміжний контакт КМЗ, тим самим контактор КМ1 стає на самоутримання (самоблокіровку ).
Після закінчення 2-3 з контакт реле часу КТ перемикається. При цьому відключається котушка контактора «зірки» КМЗ і включається котушка контактора «трикутника» КМ2, двигун переходить з «зірки» на «трикутник». Пуск закінчений.
Такий спосіб пуску дозволяє зменшити пускові струми в 3 рази.
Контрольні питання
1. Поясните роботу кінематичної схеми системи відкренювання судна з перекачуючим насосом
2. Як працює кінематична схеми системи відкренювання судна з повітряним компресором?
3. Які елементи входять до складу системи автоматизації відкренювання? Як вони взаємодіють?
4. Поясните роботу системи відкренювання фірми «Сименс»
5. Яких датчиків входять до складу схеми відкренювання фірми «Сименс»? Як вони працюють?
6. Як працює система відкренювання фірми «Інтерінг»?
7. Яких датчиків входять до складу схеми відкренювання фірми «Інтерінг»? Як вони працюють?
8. Який спосіб пуску електродвигуна компресора використаний в схемі відкренювання фірми «Інтерінг»? Які особливості цього способу?
Розділ 6. Електроприводи шлюпочних лебідок
§ 6.1. Основні відомості
Шлюпочні лебідки призначені для підйому ( спуску ) рятувальних шлюпок встановлюваних на судах.
Рятувальними шлюпками відповідно до Міжнародної конвенції по охороні людського життя на морі 1974 р. забезпечуються всі судна.
Цією ж Конвенцією встановлений ряд вимог, що пред'являються до підйомних пристроїв, званих шлюпбалками, які певною мірою визначають умови роботи електроприводу.
Згідно цим вимогам шлюпочний пристрій, схема роботи якого показана на мал. 21, повинен забезпечити:
1. вивалювання стріл шлюпбалок з повністю забезпеченою шлюпкою;
2. спуск шлюпки на воду як з повною кількістю людей, так і без людей при крені 15° на будь-який борт;
3. підйом повністю забезпеченої шлюпки з повною кількістю людей при статичному крені 8° і антикрені такої величини, при якому шлюпка не торкається бортом судна;
4. завалення повністю забезпеченої шлюпки;
5. вивалювання стріл шлюпбалок без шлюпки при стоянці судна на рівному кілі.
Спуск шлюпок здійснюється двома способами:
1. без участі електроприводу при гальмовуванні за допомогою механічного гальма з найбільшою швидкістю 0,5 м/с;
2..за допомогою електродвигуна, включеного в напрямі «Спуск» ( див. схему на рис. 22 );
Процес спуску шлюпки показаний на рис. 21.
У початковому стані 1 рухома шлюпбалка, до якої підвішена шлюпка, знаходиться в крайньому верхньому положенні, шлюпбалка притиснута до корпусу шлюпочного пристрою.
При розгальмовуванні шлюпбалка разом з шлюпкою під дією ваги поступово вивалюється за борт ( положення 2 ), швидкість вивалювання регулюється за допомогою механічного гальма або не регулюється, якщо шлюпку з шлюпбалкою опускають за допомогою електродвигуна.
В процесі спуску наступає момент, коли шлюпка торкається борту судна ( положення 3 ), надалі спуск супроводжується тертям корпусу шлюпки об борт судна.
У крайньому положенні 4 шлюпка опущена на воду.
§ 6.2. Вибір електродвигунів шлюпочних лебідок
Вибір двигуна здійснюється по умові забезпечення пуску при найбільшому розрахунковому навантаженні.
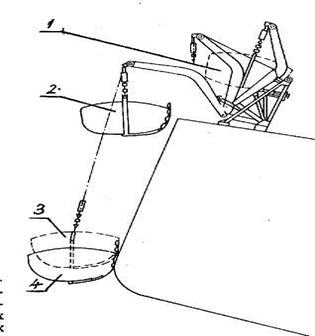
Рис. 21. Положення корпусу шлюпки при її спуску: 1 – початковий стан, шлюпбалка знаходиться в крайньому верхньому ( заваленому ) положенні; 2 - проміжне положення корпусу шлюпки, корпус не торкається борту судна; 3 - те ж, корпус шлюпки притиснутий до борту; 4 – крайнє положення корпусу шлюпки ( на воді )
Оскільки час підйому шлюпки не перевищує 5 мін, двигуни можуть мати значне перевантаження в порівнянні з каталожними даними, що приводяться для режиму 30 хв. Потужність двигунів в режимі 5 хв складає Р = (1,8…2,0) Р 
 , Р == (2.2,3) Р
, Р == (2.2,3) Р  , де Р і Р - номінальна потужність двигуна при роботі в режимах відповідно 30 і 60 хв.
, де Р і Р - номінальна потужність двигуна при роботі в режимах відповідно 30 і 60 хв.
Номінальна частота обертання двигуна знаходиться в межах 800…1100 об//хв. Ця умова визначається безпекою обслуговування механізму.
При поломці муфти вільного ходу в механізмі лебідки двигун може не відключитися, і тоді його швидкість по відношенню до номінальної збільшиться в три-чотири рази, проте частота обертання не повинна перевищувати 3500 об/хв для двигунів змінного струму і 110 % максимально допустимою для двигунів постійного струму.
Момент на валу двигуна при підйомі шлюпки (перед заваленням) определяет-
ця виразом
М =  , ( 23 )
, ( 23 )
де F - сумарне тягове зусилля;
m - максимальне число шарів на барабані;
D  и d
и d  - діаметри барабана і троса;
- діаметри барабана і троса;
ί – передавальне число редуктора;
η  - к.к.д. механізму і направляючих блоків.
- к.к.д. механізму і направляючих блоків.
Оскільки швидкість спуску регламентована, передавальне число не повинне перевищувати значення
. ί =  , ( 24 )
, ( 24 )
де n  - найбільша короткочасна частота обертання двигуна.
- найбільша короткочасна частота обертання двигуна.
Виконавчі двигуни змінного струму вибирають по пусковому моменту, виходячи з умови
М  > 1,7М
> 1,7М 
і перевіряють по максимальному моменту відповідно до умови
М  > l,8 M ( 26 )
> l,8 M ( 26 )
Виконавчі двигуни постійного струму вибирають по моменту, приведеному до режиму 30 мін, виходячи з умови
М = M  /1,5. ( 27 )
/1,5. ( 27 )
Вибрані таким чином двигуни задовольнятимуть всім умовам експлуатації пристроїв рятувальних шлюпок.
Технічні характеристики електроприводів лебідок приведені в таблицях 4 і 5.
Таблиця 4
Технічні характеристики електроприводів лебідок змінного струму
| Параметри лебідки | Двигун | Тип магніт- ного пускача | |||
| Зусил ля в тросі при підйо мі, кН | Середня швидкість підйому, м/с | Тип | Потужність у режимі 30 хв, кВт | Пусковий момент, нМ | |
| 0,1…0,15 | МАП 121-6 | 1,6 | ПММ 1211-1 | ||
| МАП 122-6 | 2,9 | ПММ 1211-1 | |||
| МАП 221-6 | 5,2 | ПММ 1211-1 | |||
| МАП 421-6 | 10,4 | ПММ 3211 | |||
| МАП 421-6 | 10,4 | ПММ 3211 | |||
| МАП422-6 | 20,0 | ПММ 4211 |
Таблица 5
Технічні характеристики електроприводів лебідок постійного струму
| Параметри лебідки | Двигун | Тип магніт- ного контро- лера | |||
| Натяг в тросі при подйомі, кН | Средняя швидкість подйому, м/с | Тип | Потужність в режимі 30 хв., кВт | Макси- мальна частота обертання, Об/хв | |
| 0,1…0,15 | ДПМ 11 | 2,2 | ВП 31 | ||
| ДПМ 12 | 3,2 | ||||
| ДПМ 21 | 5,0 | ||||
| ДПМ 31 | 9,8 | ||||
| ДПМ 31 | 9,8 | ||||
| ДПМ 32 |
§ 6.3. Системи управління електроприводами шлюпочних лебідок
Управління двигунами шлюпочних лебідок здійснюється простими методами.
Для пуску і зупинки двигунів змінного струму з короткозамкнутим ротором застосовуються магнітні пускачі двох видів:
1. нереверсивні, у яких спуск шлюпки відбувається під дією власної ваги ( гравітації ) з регулюванням швидкості за допомогою механічного гальма, а електродвигун використовується тільки для підйому шлюпки з води;
2. реверсивні, у яких спуск і підйом відбуваються за допомогою електродвигуна, швидкість якого не регулюється.
Дата добавления: 2015-12-22; просмотров: 1005;