Електроприводи підрулюючих пристроїв 3 страница
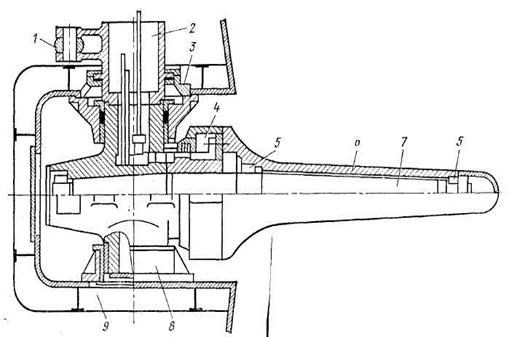
Рис. 11. Конструкція заспокоювача хитавиці фірми «Денні Браун АЕГ»:
1 – тяга гідроциліндра завалення руля; 2 – балер завалення рулюючи; 3 – верхній підшипник; 4 – лопастева рульова машина; 5 – підшипники балера руля; 6 - перо руля; 7 – балер руля; 8 – нижній підшипник; 9 – ніша
Вертикальна вісь завалення руля і горизонтальна вісь балера знаходяться в одній площині. Тому силовий привід виконаний у вигляді лопастевої рульової машини, яка закріплена на нерухомому балірі і повертається разом з картером при виготовленні системи до дії.
Зовнішній корпус машини фактично є румпелем. Він жорстко пов'язаний з пером руля, що має два підшипники на балері.
Сервопривід прибирання і висунення виконаний у вигляді одного циліндра подвійної дії, що коливається. Є блокування, що виключає прибирання керма, якщо їх поворот відрізняється від нульового більш ніж на 3°.
Подача масла в робочі порожнини приводу кожного борту проводиться від основних насосів змінної подачі. Регулювання здійснюється клапанами з електромагнітним управлінням.
Процес прибирання або виготовлення керма відбувається по жорсткий програмі, контрольованій путніми вимикачами, реле і електромагнітами.
Після висунення крил, що займає 1,5 - 2 хв, магістралі насосів автоматично з'єднуються з порожнинами рульової машини повороту рулюючи.
Прибирання керма може бути проведене з використанням резервного насоса з електроприводом малої потужності. При необхідності від цього насоса може бути проведений доворот крила до нульового положення.
Операції виготовлення і ручного управління можуть здійснюватися вибірково з двох постів, забезпечених необхідними засобами сигналізації. Основний пост розташований в рульовій рубці, другій, — в приміщенні заспокоювачів хитавиці, де розміщуються всі вимірювальні і силові елементи схеми.
Живлення схеми здійснюється окремим кабелем безпосередньо з головного розподільного щита.
При відмові системи управління одного борту працездатність другого керма зберігається. Разом з тим розмах хитавиці збільшується, що сприяє підвищенню моментів на балері і можливому перевантаженні приводного двигуна робочого насоса.
Випробування показали, що незалежно від положення керма при малих хвилюваннях морить із-за завихрень в отворах ніш спостерігається незначна втрата швидкості ходу, що доходить за оцінкою фірми до 0,4 уз.
У штормових умовах, навпаки, робота заспокоювача вирівнює положення корпусу, знижує загальний опір руху, що приводить до підвищення швидкості на 1 - 1,5 уз.
Функціональна схема заспокоювача хитавиці.
Функціональна схема заспокоювача хитавиці зображена на рис. 12.
До складу схеми входять:
БРМ1, БРМ2 - бортові плунжерні рульові машини;
M1, M2 - електродвигуни основних насосів змінної подачі асинхронні короткозамкнуті (380 В, 22 кВт, 580 об/хв). Мають роздільний запуск за допомогою магнітних пускачів з місцевого поста;
ГУ, ГУ1, ГУ2 - гідропідсилювачі. Кожен гідропідсилювач має свою автономну систему живлення від шестерного насоса, що приводиться в дію асинхронним електродвигуном (380 В, 0,1 кВт, 1420 об/хв). Пуск всіх трьох електродвигунів проводиться одним пускачем з місцевого поста управління;
ГТГ, ГВ — гіроскопічні прилади, що проводять вимірювання кута крену, його швидкості і прискорення.
С3, С4, С5, С6, С12, С13 диференціальні сельсини. Використовуються як елементи підсумовування двох параметрів.

Рис. 12. Функціональна схема заспокоювача хитавиці фірми «Денні Браун АЕГ»
Кут повороту ротора обмежений, тому струмопідвід до його трифазної обмотки виконаний за допомогою гнучких контактних пружин.
Диференціальні сельсины мають різний характер підсумовування. Наприклад, сельсини СЗ, С4, С6 працюють в режимі поворотних трансформаторів, де вихідна пульсуюча э. д. з. трифазної обмотки характеризує спільно механічний поворот ротора і положення осі збудження вхідної трифазної обмотки, яке у свою чергу визначається кутовою координатою зовнішніх датчиків.
Сельсини С5, С12, С13 працюють в індикаторному режимі, коли при відхиленні осей намагнічення статора і ротора від рівноважного стану виникає синхронізуючий момент, що погоджує, визначає поворот ротора і переміщення золотника гідропідсилювача, що управляє;
С10, С11, С14, С15 - однофазні контактні сельсини з обмоткою збудження на роторі. Використовуються як датчики кутових положень, які характеризуються значеннями пульсуючої е. р. с. трифазної обмотки статора;
Cl, C7 - контактні сельсини-трансформатори, перетворювачі кута повороту в еквівалентну однофазну напругу;
І - інтегратор, що включає двофазний асинхронний електродвигун з порожнистим ротором С2, редуктор з великим передавальним відношенням Р, індукційний датчик кута повороту С1;
КОС — автотрансформатор, регулюючий рівень сигналу зворотного зв'язку по положенню бортового керма. Сигнал подається на одну фазу ротора сельсина С6, дві інші фази якого харчуються від мережі.
Робота схеми.
Гіроскопічні датчики ГТГ, ГВ перетворять параметри бортової хитавиці судна в еквівалентні кути повороту.
Ротор диференціального сельсина СЗ повертається відповідно до кута хитавиці і. Дві фази ротора СЗ харчуються від мережі.
Вихідна напруга статора управляє двофазним асинхронним двигуном С2 інтегратора И. Сельсин-трансформатор С1 видає напругу, еквівалентну зсуву симетруючої осі хитавиці судна.
Після підсумовування на статорі сельсина СЗ з'являється сигнал, що характеризує в кожен момент часу сумарне значення кута хитавиці і і асиметрії хитавиці  .
.
У сельсина С4 на фазах ротора утворюється пульсуюча э. д. з, яка додатково до сигналу, що знімається з СЗ, враховує другу похідну від кута крену θ.
Із статора сельсина С6 знімається пульсуюча е. р. с., яка у відповідному масштабі характеризує різницю швидкості хитавиці θ' і відхилення провідного лівого бортового керма.
Поворот золотника гідропідсилювача ГУ, що визначає узагальнений сигнал управління в системі регулювання, знайдеться у такому вигляді:
θ  = а
= а  θ + а
θ + а 
 + а
+ а  + а
+ а 
 - kδ (14 )
- kδ (14 )
Цей сигнал є загальним для управління рульовими машинами правого і лівого бортів.
Для стабілізації режиму регулювання, враховуючи наявність послідовно сполучених інтегруючих ланок, виконавчий гідравлічний механізм охоплений внутрішнім зворотним зв'язком по куту повороту рулюючи.
Цей зворотний зв'язок забезпечує стійкість роботи контура ГУ1-Н1-БРМ1 (ГУ2- Н2-БРМ2).
Сигнал управління, що визначає стежачу роботу рульової машини, формується на диференціальному сельсині С13 (С12) як різниця узагальненого сигналу і і кута д повороту пера рулюючи роздільно машин кожного борту.
Контрольні питання
1. Яке призначення систем заспокоювачів хитавиці?
2. В чому полягає принцип дії бортового керма?
3. Поясните роботу структурної схеми системи управління заспокоювачів хитавиці
4. Як влаштований заспокоювач хитавиці фірми «Денні Браун АЕГ»?
5. За допомогою яких пристроїв висувається ( забираються ) бортове кермо?
6. Скільки постів управління використовується для управління електроприводом заспокоювачів хитавиці? Де вони розташовані на судні?
7. Поясните роботу функціональної схеми системи управління заспокоювачів хитавиці фірми «Денні Браун АЕГ»
8. Яке призначення гіроскопічних приладів ГТГ і ГВ функціональної схеми системи управління заспокоювачів хитавиці фірми «Денні Браун АЕГ»
Розділ 4. Електроприводи автоматичних буксирних лебідок
§ 4.1. Основні відомості
Буксирування судів і інших плавучих споруд у відкритому морі має свої особливості.
В умовах непостійності і випадковості зовнішніх обурень, можливого маневрування буксируючого судна відстань між зв'язаними об'єктами не зберігається постійною. Ця обставина приводить до зміни натягнення в буксирному канаті, яке в несприятливих умовах режиму буксирування може досягти критичного значення.
Тому судна, призначені для більш менш регулярних буксировочных операцій (морські буксири, рятувальники, криголами), як правило, забезпечуються спеціальними буксирними лебідками з електроприводом.
Такі лебідки забезпечують зберігання на робочому барабані всього запасу буксирного каната, ручне і автоматичне регулювання довжини буксира при зміні умов плавання дозволяють оптимізувати режим буксирування.
Одному з основних завдань лебідки в автоматичному режимі є підтримка постійного натягнення в канаті, оскільки різкі ударні навантаження можуть привести до його обриву, а в умовах маневрування - навіть до перекидання буксира.
Значне слабке місце троса не виключає його можливість намотування на гвинт буксира.
Робота електроприводу і засобів автоматики буксирної лебідки в даному випадку регулювання зусиль має багато загального з роботою автоматичних швартових лебідок.
Зусилля, що виникають в буксирному канаті.
Навантаження на буксирному тросі, яке визначає характер роботи електроприводу, має три складові.
Постійна сила T1.
Вона обумовлена опором води і повітря руху буксируваного об'єкту — воза. Це так зване натягнення буксира при тихій погоді.
Значення буксировочной сили Т є заданим. Номінальне зусилля на гаке буксира, згідно Регістру, визначається при швидкості руху не більше 5 уз.
Вирішуючи для буксирного каната варіаційну задачу, як для важкої нитки, можна скласти її математичний опис і визначити взаємний зв'язок між довжиною буксира, горизонтальним натягненням на клюзе і параметром провисання.
При цьому абсолютно очевидно, що при нормованому зусиллі абсолютне значення провисання буксирної лінії залежить від її початкової довжини і маси одного метра троса.
Ударні сили Т2.
Вони виникають в результаті різкої зміни зовнішніх умов буксирування. Наприклад, при шквальному вітрі, коли загальна сила натягнення може порівнятися з упором рушіїв на швартовому режимі.
При вході воза на мілководді, в битий лід різко зростає його опір руху, що стає додатковим навантаженням на буксирний канат.
Надмірні ударні сили можуть виникати також в результаті неощадливої зміни режиму роботи буксира, зміни курсу, упору грібного гвинта, включення електроприводу буксирної лебідки, коли необхідно підвищується швидкість воза.
Ударне навантаження на буксирний канат не є стаціонарним.
Гармонійні сили Т3.
Виникають із-за хитавиці буксира і воза. Хитавиця обумовлює періодичну зміну відстані між точками кріплення троса. Значення цієї зміни залежить від параметрів морського хвилювання, а також від курсу буксира щодо лінії бігу хвиль.
Максимальне подовжнє переміщення буксира на хвилюванні буде при строгому русі урозріз хвилі.
Як правило, маса воза значно перевершує масу буксира.
В цьому випадку для оцінки гармонійних сил, що виникають в канаті, досить розглянути орбітальні рухи буксира при подовжній хитавиці. Радіус цього руху r  - не більше половини висоти хвилі.
- не більше половини висоти хвилі.
Амплітуда гармонійного зусилля на буксирному тросі може бути знайдена
T  = m
= m  r σ
r σ  ( 15 )
( 15 )
де m  маса буксира;
маса буксира;
σ =  - кутова частота вітрового хвилювання.
- кутова частота вітрового хвилювання.
У формуванні характеру натягнення буксира беруть участь розглянуті зовнішні обурюючі навантаження, а також компенсуючі пасивні і активні зусилля, визначувані пружним розтягуванням каната, зміною його параметра провисання, направленою роботою електроприводу.
Все три компенсуючі чинники визначають деяку свободу переміщення буксира і воза одного щодо іншого.
Пружність буксирних канатів залежить від властивостей матеріалу і їх довжини. Подовження жорстко закріплених сталевих тросів підкоряється наступному закону:
Δl =  , ( 16 )
, ( 16 )
де Т - натягнення троса, кН;
R - розривне зусилля, кН;
l - довжина витравленого троса, м;
с = 0,2…0,25 % - відносне розтягування сталевого троса у відсотках із-за скручування і розтягування.
Найважливішим способом амортизації зовнішніх зусиль є так звана вагова гра буксира, коли зміна відстані між об'єктами досягається за допомогою зміни форми провисаючого каната.
Обмеження тягового зусилля в буксирному канаті може проводитися шляхом його підбурювання або вибору в такт змінним зовнішнім силам, за допомогою автоматизованого електроприводу.
Розглядаючи роботу електроприводу для компенсації гармонійних сил обурення T , можна встановити наступне.
Період хитавиці буксира на хвилі складає 5 - 12 с при значній амплітуді його горизонтального переміщення.
Дія електроприводу в таких умовах повинна відбуватися при великих робочих швидкостях, при номінальному натягненні каната. Потрібна потужність лебідки виходить сумірної з потужністю енергетичної установки.
Цю обставину зумовлює недоцільність компенсації гармонійних сил обурення за допомогою електроприводу.
В даний час періодичні коливання натягнення буксира, що викликаються хвилюванням морить, практично цілком компенсуються пружністю і ваговою грою каната.
Збільшення загальної податливості гнучкого зв'язку досягається за допомогою збільшення довжини буксира, яка в деяких випадках може досягати кілометра.
До складу такого зв'язку включають амортизатори з синтетичних тросів. Ланцюгові змички і зосереджені вантажі дозволяють збільшити провисання і загальну гнучкість буксирного зв'язку.
Потужність виконавчого електродвигуна.
Електропривод буксирної лебідки забезпечує видачу необхідної довжини буксирного каната і утримання її в процесі буксирування.
При автоматичній роботі лебідка забезпечує амортизацію зусиль шляхом витравляння деякої встановленої довжини буксирного каната.
Зниження зусилля супроводжується підбиранням буферної ділянки троса.
В принципі можна вважати, що лебідка забезпечує дискретне регулювання постійності двох параметрів: встановленого натягнення і довжини буксирного каната.
При ручному і автоматичному управліннях лебідкою в перехідних процесах вибору і зупинки приводу після підбурювання можуть виникнути ударні перевантаження, небезпечні для цілісності троса.
Тому правильний вибір номінальних і регулювальних робочих швидкостей лебідки має вирішальне значення.
Практикою заводу «Динамо» встановлені наступні співвідношення між номінальними натягненнями і швидкістю вибору троса (табл. 2 ).
Таблиця 2.
Співвідношення між номінальними натягненнями і швидкістю вибору троса
| Номінальне натягнен-ня, кН | 100-120 | 120-180 | 180-270 | 270-400 | 400-500 | 500-600 |
| Швид кість вибира-ння троса, м/с: -номіналь- на -без навантаження | 0,22…0,35 0,5 | 0,18…0,30 0,5 | 0,16…0,25 0,5 | 0,13…0,22 0,45 | 0,12…0,2 0,4 | 0,11…0,15 0,45 |
Номінальні параметри дозволяють визначити значення номінальної потужності ВД (кВт):
Р  =
=  , ( 17 )
, ( 17 )
де η = 0,75.0,82 – к. п. д. кінематичного механізму передачі лебідки.
Розраховану потужність відносять до короткочасного режиму роботи - 30 хв для неавтоматичних буксирних лебідок і 60 хв для автоматичних лебідок з вимірником натягнення.
Робота лебідки по установці буксира короткочасна, при порівняно невеликому числі включень.
При буксируванні в складних умовах режим роботи близький до повторно-короткочасного з ПВ% =3 - 5%, при частоті включень не більше 100 за одну годину.
§ 4.2. Принцип автоматизації буксирних лебідок
При автоматичній роботі буксирна лебідка здійснює підтримку заданого натягнення троса за допомогою змін його довжини в обумовлених порівняно невеликих межах.
Перший параметр регулювання ( натягнення ) є таким, що очолює, другий ( довжина ) - підлеглим.
Дії буксирної і швартової лебідок багато в чому співпадають і мають загальні принципи автоматизації.
На судах морського флоту найбільш поширені автоматичні буксирні лебідки (АБЛ) з пристроєм для контролю натягнення, що зважує, і переривистим включенням виконавчого електродвигуна. Функціональна схема такої лебідки представлена на рис. 13. Двигун лебідки М через редуктор Р пов'язаний з робочим барабаном Б.

Рис. 13. Функціональна схема АБЛ з вимірником натягнення: М – електродвигун; Р – редуктор; Б – барабан АБЛ; МС – магнітна станція ( станція управління ); ДД – датчик довжини троса; ДН – датчик натягнення троса; ПУ – пост управління
У сучасних лебідках, розрахованих на великі натягнення (500—600 кН) і великий запас буксирного троса, вантажний барабан часто замінюється канатоведучим шківом, на якому регулюється номінальне натягнення.
Збігаючий кінець троса пов'язаний з окремою в'юшкою додаткового електропривода. На в'юшці вона служить для зберігання троса і в принципі може розміщуватися в закритому приміщенні.
Така компоновка механізму зменшує габаритні розміри самої лебідки, істотно збільшує термін служби троса.
Редуктор Р має в своєму складі вимірника зусилля на барабані, пов'язаного з датчиком натягнення ДН. Згідно вимогам Регістра датчик натягнення одночасно з роботою автоматики лебідки забезпечує контроль натягнення троса.
Показуючі прилади датчика натягнення винесені на пости управління, один з яких рекомендується встановлювати в рульовій рубці або на містку.
На редукторі також встановлюється лічильник довжини витравленого троса ДД, який є шляховим командоапаратом.
Тут є дві шкали, вказуючі загальну довжину витравленого троса і буферну довжину, що визначає відрізок максимального підбурювання каната при компенсації зовнішніх обурень. Установка буферної довжини проводиться уручну залежно від умов буксирування.
У автоматичному режимі управління двигуном здійснюється за допомогою командоапаратів ДД і ДН. Підвищення зусилля понад заданий (1,5…2 Т  ) приводить до спрацьовування ДН.
) приводить до спрацьовування ДН.
Двигун включається в напрямі «Труїти» і зупиняється після зниження натягнення до нормального. У подальшому командоапаратом ДД двигун включається на вибір підбуреної ділянки каната.
Таким чином буксировочная довжина троса і відстань між об'єктами підтримуються незмінними.
Якщо в період вибору відбудеться сплеск натягнення, то датчик ДН, володіючи пріоритетом, переведе двигун в положення «Травити».
Після падіння зусилля процес вибору троса поновлюється.
При систематичних перевантаженнях з короткими перервами підбурювання троса буде переважаючим над вибором. В цьому випадку при скиданні встановленої буферної довжини (20 .35 м) включається попереджувальна сигналізація.
Система без пристрою, що зважує, для АБЛ широкого
застосування не знайшла. Це пояснюється значними втратами в двигуні і малою ефективністю його використання в режимі стоянки під струмом.
§ 4.3. Системи управління електроприводами АБЛ
Найбільш поширеним електроприводом буксирних лебідок з тяговими зусиллями понад 300 кН експлуатованих судів спеціального призначення є система генератор - двигун.
Ця система достатньо проста, надійна і в значній мірі задовольняє різноманітним умовам морського буксирування.
Останнім часом для буксирних лебідок представляється можливим застосувати приводи тиристорів постійного струму або так звані системи керований випрямляч -двигун (УВ—Д).
Система УВ—Д відрізняється великою швидкодією, широким діапазоном регулювання швидкості, підвищеними значеннями загального к. п. д.
Заводом «Динамо» розроблена серія електроприводів для АБЛ за системою УВ -Д.
На рис. 14 показана функціональна схема електроприводу тиристора з двома послідовно сполученими двигунами постійного струму.
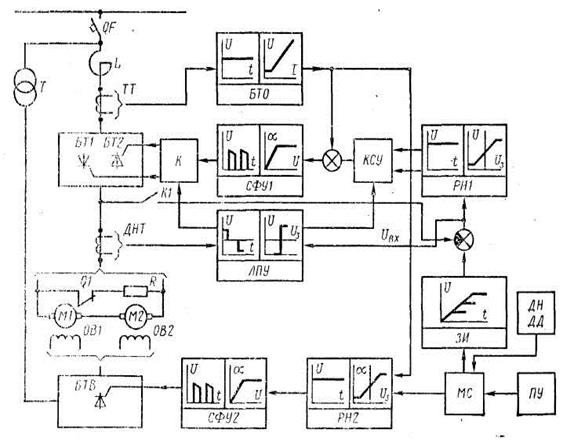
Рис. 14. Функціональна схема АБЛ за системою УВ - Д
Привід призначений для лебідок із зусиллям 500 кН, укомплектований двигунами постійного струму типу ДПМ-62 потужністю по 48 кВт.
Система управління включає типовий перетворювач тиристора серії АТРК 250/460.
У силовому ланцюзі є два блоки тиристорів БТ1 і БТ2, що включених по мостовій трифазній схемі і здійснюють реверсування приводу.
Використаний роздільний спосіб управління мостами тиристорів, при якому робочий перехід з однієї групи тиристорів на іншу може бути проведений після спаду випрямленого струму до нуля.
Джерелом збудження двигунів є керований однофазний випрямний міст ВТВ.
Управління перетворювачами тиристорів проводиться за вертикальним принципом за допомогою багатоканальних фазових систем СФУ1, СФУ2.
Тиристори обох груп силового ланцюга мають одну систему фазового управління СФУ1. Перемикання ланцюга управління груп тиристорів проводиться спеціальним комутатором імпульсів До.
Загальний задаючий сигнал формується постом управління (ПУ) або датчиками ДД, ДН при автоматичній роботі і через магнітну станцію МС, що виконує комутаційну роль, поступає на П-регулятори напруги PHI, PH2.
Рівень сигналу, що подається на РН1, може настроюватися в блоці завдання інтенсивності ЗИ, що дозволяє змінювати по ступенях положення механічних характеристик приводу.
Регулятор РН1 готує вихідні сигнали для обох груп силових тиристорів.
Вибір необхідного сигналу проводиться комутатором КСУ, керованим логічним перемикаючим елементом ЛПУ, який одночасно відкриває потрібний канал комутатора імпульсів До.
Пристрій ЛПУ є трігер, що змінює свій стан залежно від знаку вхідного сигналу U  .
.
Додаткова заборона на перемикання ЛПУ пов'язана з наявністю струму в ланцюзі навантаження перетворювача, значення якого контролюється датчиком нульового струму ДНТ.
Датчик ДНТ - дросель насичення, керований постійним струмом якірного ланцюга двигуна.
Механічні характеристики приводу (рис. 15 ) формуються шляхом направленого регулювання напруги на якорі і за допомогою зміни потоку збудження.
Негативний зворотний зв'язок по струму навантаження, організована блоком струмового відсічення БТО, забезпечує створення крутопадающих характеристик і обмежує пусковий момент приводу.
При створенні характеристик того, що труїть за допомогою проміжного реле K1 керованого з поста, вводиться зворотний зв'язок по напрузі перетворювача, що сприяє стабілізації швидкості приводу в режимі рекуперації.
Ручне управління приводом проводиться командоконтролером, яким створюється по три робочі характеристики різного швидкісного рівня.

Рис. 15. Механічні характеристики електроприводу тиристора АБЛ
Постановкою рукоятки командоапарата в положення А схема переводиться в автоматичний режим роботи.
При надмірному натягненні відбувається підбурювання буксира. Двигуни відгальмовуються і працюють в режимі динамічного гальмування.
Енергія, що генерується, розсівається в шунтуючому резисторі R. Перехід в режим вибору відбувається після підбурювання буферної довжини троса і зниження зусилля.
Ступінь зменшення натягнення визначає швидкісну характеристику вибору 1В або 2В.
Враховуючи, що привід буксирної лебідки має потужність, сумірну з потужністю електростанції, схемою передбачається автоматичне включення шунтуючого резистора R при надмірному зростанні рекуперируемої енергії, яка при малому числі споживачів може перевести генератори в руховий режим.
Контрольні питання
1. З яких складових складається навантаження на буксирному тросі АБЛ?
2. Як визначається номінальна потужність виконавчого двигуна АБЛ?
3. Поясните роботу функціональної схеми АБЛ з пристроєм, що зважує
4. Поясните роботу функціональної схеми АБЛ за системою УВ – Д
5. За яким принципом здійснюється управління перетворювачем тиристора постійного струму у функціональній схемі АБЛ за системою УВ – Д?
6. Яким чином регулюється швидкість виконавчого двигуна АБЛ за системою УВ – Д?
7. Який вид електричного гальмування використовується у функціональній схемі АБЛ за системою УВ – Д?
8. Яке призначення шунтуючого резистора R у функціональній схемі АБЛ за системою УВ – Д?
Розділ 5. Електроприводи систем відкренювання суден
§ 5.1. Основні відомості
Вирівнювання крену є обов'язковим для суден з горизонтальним способом вантаження ( типу Ро-ро ).
Це не тільки підвищує безпеку вантажних операцій, не дозволяючи судну перекинутися, але і сприяє нормалізації навантаження на в'їзну апарель, чим забезпечується її надійне функціонування.
§ 5.2. Принцип дії систем відкренування
Вирівнювання крену судна в загальному випадку може бути проведене за допомогою перерозподілу води в баластних танках за допомогою відцентрових насосів.
На ролкерах крен не повинен перевищувати 0,5…2,0º. При великій інтенсивності навантажувально-розвантажувальних робіт виникає необхідність в частому вирівнюванні судна.
Тому системи відкренування в більшості випадків автоматизовані.
Принцип роботи систем вирівнювання крену полягає в наступному (рис. 16 ).
По бортах судна встановлюється одна або декілька цистерн великої місткості. У нормальних умовах вони наполовину заповнюються водою.
Для створення моменту, що кренить або вирівнюючого, необхідно перемістити рідину з цистерн одного борту в цистерни іншого борту.
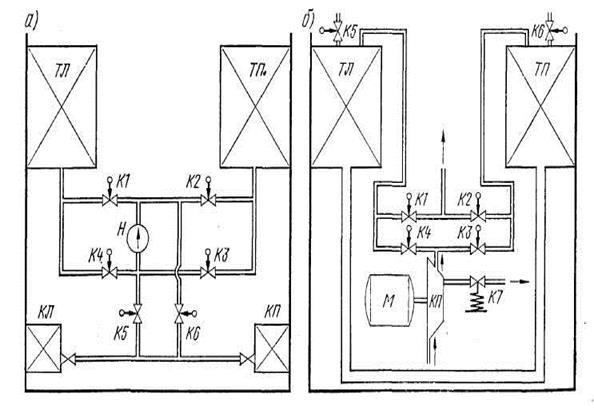
Рис. 16. Кінематичні схеми систем відкренування судна: а – схема з перекачуючим насосом; б – схема з перекачуванням за допомогою надмірного тиску повітря в танках
В даний час широко використовуються дві кінематичні схеми.
У першій ( рис. 16, а ) переміщення води проводиться пропелерним насосом Н, який обертається за допомогою електроприводу.
Напрям подачі визначається роботою групи реверсуючих пневматичних клапанів К1 .К4.
Наприклад, при включенні клапанів К1, КЗ відбувається перекачування рідини з танка ТП правого борту в танк ТЛ лівого борту.
Після створення необхідного поновлюючого моменту, що контролюється за допомогою кренометра, клапани закриваються і насос зупиняється. Заповнення або спуск води проводиться працюючим насосом через кінгстон КП, КЛ правого або лівого борту. У створенні потрібного напряму потоку рідині додатково беруть участь клапани К5, К6.
У другій схемі ( рис. 16, б ), переміщення води здійснюється шляхом створення надмірного тиску повітря в одній з цистерн.
Повітря закачується електрокомпресором, який безперервно знаходиться в роботі.
Необхідний напрям подачі повітря вибирається пневматичними клапанами КЗ, К4. При цьому цистерна борту, протилежного нагнітанню, сполучається з атмосферою за допомогою відповідного клапана К1 або К2.
Дата добавления: 2015-12-22; просмотров: 1277;