автоматических систем.
Оптимальное оценивание координат состояния
14.1.Понятие об алгоритмах оценивания.
В задачах анализа и синтеза АС практически всегда возникает проблема определения координат состояния объекта управления. Обычно непосредственному измерению доступно лишь незначительное число координат, причем измерения z, как правило, производятся с некоторыми случайными ошибками xt. Отсюда возникает проблема
|

восстановления вектора состояния объекта Х по результатам доступных измерений z, которую в общем случае будем называть задачей оценивания координат состояния.
Если оценивание осуществляется в детерминированной постановке, то есть без случайных возмущений и помех, то говорят о задаче наблюдения, в противном случае – о задаче фильтрации.
Рассмотрим возможные алгоритмы решения этих задач.
14.2.постановка задачи наблюдения. Наблюдатель Люэнбергера.
Пусть имеется многомерная детерминированная АС вида:
Здесь: X-n-мерный вектор состояния;
Y-m-мерный вектор входных воздействий (управления);
Z-r-мерный вектор измерения (обычно r£n).
Предполагается, что система наблюдаема по Калману, то есть

Ставится задача: определить вектор состояния Х по известному вектору измерения Z и входу Y.
Очевидно, решение задачи наблюдения тривиально, если матрица С квадратичная (r=n) и невырожденная. Так как в этом случае
X=C-1Z
Однако на практике обычно измерителей (датчиков информации) меньше числа координат состояния r<n. Как в этом случае определить вектор состояния Х?
Введем в рассмотрение некоторый наблюдатель, описываемый матричным дифференциальным уравнением

 (*)
(*)
здесь:  -мерная оценка вектора Х, получаемая на основе вектора
-мерная оценка вектора Х, получаемая на основе вектора
измерения Z;
К- неизвестная матрица коэффициентов усиления, размерности
r´n.
Данный наблюдатель получил название наблюдателя Люэнбергера. Матрицу К в этом наблюдателе надо подобрать так, чтобы
 тогда
тогда  а уравнение наблюдателя превращается в уравнение состояния объекта
а уравнение наблюдателя превращается в уравнение состояния объекта
Таким образом, если мы подберем матрицу К так, чтобы
 ,
,
то вычисляя  на основе реальных измерений Z по формуле (*) мы тем самым найдем (восстановим) неизвестный вектор состояния Х.
на основе реальных измерений Z по формуле (*) мы тем самым найдем (восстановим) неизвестный вектор состояния Х.
Определим теперь алгоритм наблюдения матрицы К. Для этого вычтем из уравнения состояния уравнение наблюдателя (*)
 (**)
(**)
Очевидно, что стремление  означает, что e®0.
означает, что e®0.
Последнее возможно в случае устойчивой системы (**).
Таким образом, матрица К должна выбираться так, чтобы матрица
А-КС была устойчивой (гурвицевой).
Устойчивость А-КС означает, что характеристический полином
det(Ep-A+KC) имеет корни с отрицательными действительными частями.
И так задача восстановления вектора Х по вектору измерения Z сводится к построению наблюдателя Люэнбергера (программирование уравнения (*) на ЭВМ) и выбору матрицы К такой, что матрица А-КС была устойчивой.
Рассмотрим структурную схему такого наблюдения
|

То есть на выходе наблюдателя Люэнбергера получается оценка вектора  , которая при устойчивой матрице А-КС стремится к вектору состояния х. Очевидно, чем быстрее оценка сходится к истинному значению вектора состояния х, тем лучше наблюдатель. Скорость сходимости можно увеличить путем повышения запаса устойчивости матрицы А-КС.
, которая при устойчивой матрице А-КС стремится к вектору состояния х. Очевидно, чем быстрее оценка сходится к истинному значению вектора состояния х, тем лучше наблюдатель. Скорость сходимости можно увеличить путем повышения запаса устойчивости матрицы А-КС.
14.3. Постановка задачи оптимальной линейной фильтрации.
Непрерывный фильтр Калмана-Бьюси.
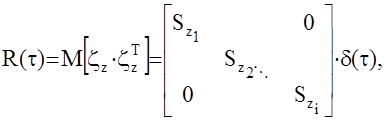
Рассмотрим многомерную стохастическую АС вида
 Здесь zх,xz – векторные некорреляированные белые шумы с диагональными корреляционными матрицами Q и R.(и с нулевыми математическими ожиданиями).
Здесь zх,xz – векторные некорреляированные белые шумы с диагональными корреляционными матрицами Q и R.(и с нулевыми математическими ожиданиями).
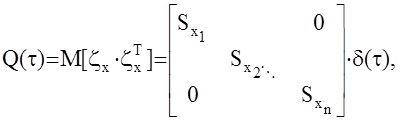
 - интенсивности скалярных белых шумов
- интенсивности скалярных белых шумов  .
.
 - интенсивности скалярных белых шумов
- интенсивности скалярных белых шумов  .
.
|

Необходимо синтезировать фильтр, выдающий оценку вектора состояния , оптимальным образом приближенную к неизвестному вектору состояния Х.
В качестве критерия оптимальности принимается
|
 то есть минимизируется сумма дисперсий ошибок
то есть минимизируется сумма дисперсий ошибок  оценивания
оценивания 
Калманом и Бьюси доказано, что фильтр оптимальный в указанном смысле, имеет структуру наблюдателя Люэнбергера 
где K=P(t)CTR-1-матрица коэффициентов усиления размерности (n´r)
P(t)- матрица, размерности n´n, определяемая из решения матричного дифференциального уравнения Риккати.

Таким образом, реализация фильтра Калмана предполагает совместное решение на ЭВМ двух дифференциальных уравнений
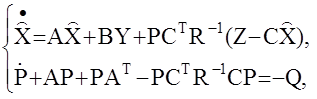
Решаются они на борту ЛА в БЦВМ в реальном масштабе времени.
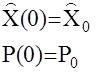
Общая структура фильтра Калмана-Бьюси имеет вид:
|
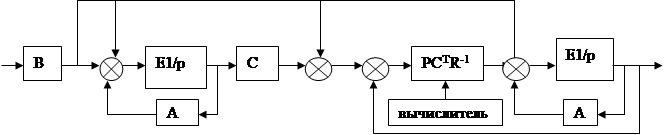
Объект наблюдения Фильтр Калмана-Бьюси
|
В результате работы фильтра на его выходе получается оценка , которая оптимальным образом приближается к искомому состоянию Х.
Однако процесс сближения во – многом определяется правильностью задания параметров фильтра: корреляционных матриц Q, R, начальных условий  эффективности вычислительной процедуры решения уравнений Риккати.
эффективности вычислительной процедуры решения уравнений Риккати.
14.4.Дискретный фильтр Калмана.
Оценки вектора состояний объекта при использовании фильтра
Калмана являются функциями времени, и поэтому в большинстве случаев предпочтение отдается рекуррентным процедурам оценивания, позволяющим вычислять оценки  по мере поступления измерений
по мере поступления измерений  .
.
Дискретное рассмотрение приводит к аглебраизации решения задачи, то есть а исключению интегрирования нелинейных дифференциальных уравнений системы, позволяющее получать рекуррентные аналитические соотношения, а следовательно, и упрощение вычислительных процедур.
Рассмотрим построение алгоритма с использованием рекуррентного метода оценивания с минимальной дисперсией. Он наиболее удобен, поскольку не требует никаких предварительных теоретических выкладок и допускает простую и наглядную интерпретацию результатов.
Предварительно рассмотрим взвешенное усреднение двух векторных величин.
1.)Алгоритм оценивания, известный как фильтр Калмана, формирует взвешенное среднее двух независимых векторных оценок.
Предположим, для некоторого m – мерного вектора х найдены две статистические независимые оценки  . Их взвешенным средним назовем величину
. Их взвешенным средним назовем величину  (13.8.) Где
(13.8.) Где  -весовая матрица (m´m), которая выбирается таким образом, чтобы дисперсия
-весовая матрица (m´m), которая выбирается таким образом, чтобы дисперсия
(или СКО) оценки была минимальна.
Рассмотрим динамическую систему состоящую из объекта наблюдения плюс фильтр Калмана, для которой введем обозначения:
 - вектор состояния объекта;
- вектор состояния объекта;
 - вектор выходных измерений, откуда
- вектор выходных измерений, откуда  . С учетом этого, уравнение (13.8.) примет вид
. С учетом этого, уравнение (13.8.) примет вид  (13.9.)
(13.9.)
Необходимо искать оценку вектора состояний, которая минимально (в вероятностном смысле) отличалась бы от х, то есть обеспечила минимум дисперсии.
2). Применим описанную процедуру к оцениванию вектора состояния Х[(n+1)Tn] марковского процесса
X[(n+1Tn]=AX[nTN]+FV[nTn] ;
Y[(n+1)Tn]+CX[(n+1)Tn]+N[(n+1)Tn]; (13.10)
где V[nTn] и N[(n+1)Tn]- случайные процессы в виде белого шума.
Представление такое же как и в фильтре Калмана-Бьюси. В уравнении (13.9) обозначим:
 - значение
- значение  предсказанное на основе ранее полученной оценки . Предсказанное значение вектора состояния определяется по формуле
предсказанное на основе ранее полученной оценки . Предсказанное значение вектора состояния определяется по формуле  (13.11)
(13.11)
В этом выражении вместо неизвестной точной величины V[nTn] использовано ее математическое ожидание mV;
Y2=Y[(n+1)Tn] – новое измерение выхода.
С учетом введенных обозначений рекуррентный алгоритм оценивания приобретает вид:

где K[(n+1)Tn] – матрица коррекции. (13.12)
3) Определение матрицы коррекции.
| <== предыдущая лекция | | | следующая лекция ==> |
| Статистическая динамика автоматических систем. | | | Идентификация параметров автоматических систем. |
Дата добавления: 2015-12-16; просмотров: 1419;