СТРУКТУРА ТИПОВОЙ СИТД
На рис. представлена развернутая структура типовой СиТД.
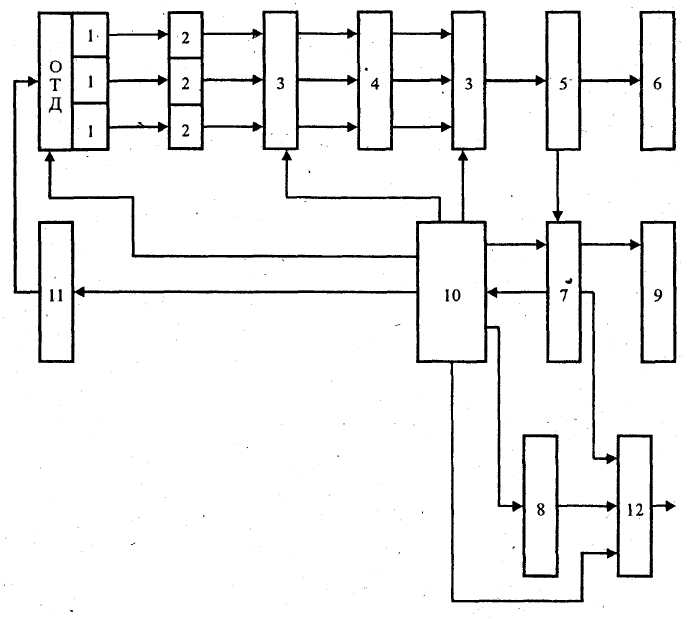
Рисунок 3 – Структура типовой СиТД:
1 – датчики сигналов; 2 – линии связи с усилительными устройствами; 3 – коммутаторы; 4 – преобразователи; 5 – измерительный прибор; 6 – индикатор; 7 – дискриминатор; (устройство сравнения), 8 – поле допусков, вычисленные коэффициенты модели ОД;
9 – индикатор вида ТС (документирующее или запоминающее устройство);
10 – управляющее устройство, 11 – стимулирующее (воздействующее на ОД) устройство; 12 – прогнозирующее устройство.
Первичной подсистемой СТД является измерительное устройство, обеспечивающее заданную точность диагностирования. Так как измерительное устройство, как правило, не может прямо измерять все виды параметров сигналов технической системы или ОД, составными элементами СТД являются такие устройства как коммутаторы и преобразователи.
На выходе измерительного устройства формируется информация позволяющая определить техническое состояние объекта. Эта информация путем различных способов отображения может быть представлена оператору или может быть автоматически обработана для дальнейшего использования.
Важным элементом такой обработки является сравнение представленной информации с полем допусков для вынесения решения о виде ТС ОД.
После принятия решения о ТС ОД осуществляются еще две операции: операция управления качеством изделия и операция стимулирования – изменения структуры ОД.
Прогнозирующее устройство способно определять состояние объекта в будущем посредством обработки информации о текущем и прошлом состояниях системы.
В результате работы функциональных подсистем СиТД, за каждой из которых стоит конкретная схемотехническая реализация, и воздействия на тракт помех и шумов, решения о виде ТС всегда выносятся с определенной ошибкой. Из опыта известно, что ошибки диагностирования могут быть допущены в основном из-за неисправности средства диагностирования и больших погрешностях измерений в процессе диагностирования. Этого можно попытаться избежать применением средств контроля и самодиагностики самих СТД.
Исходя из этого, правильное диагностирование ТС ОД будет определяться совокупным состоянием ОД и СТД, характеристиками измерительных устройств и устройства сравнения, а также правильности применяемых методов диагностирования.
Поэтому количественные характеристики показателей диагностирования должны быть представлены вероятностями состояний ОД и СТД, и вероятностями принятия решений о их ТС.
На количественное значение этих вероятностей в той или иной степени оказывают влияние все элементы структурной схемы технического диагностирования. На погрешность точности измерения параметров сигналов в большей степени влияют:
- выбор допусков на диапазон изменения диагностируемых параметров;
- погрешности преобразования и измерительных приборов;
- аддитивные (ступенчатые одиночные) и мультипликативные (повторяющиеся – шум) помехи, возникающие в самом ОД;
- шумы в каналах связи и в цепях коммутации;
- погрешности сравнения;
- ошибки при принятии решения о ТС;
- быстродействие системы;
- ошибки, возникающие в наборе управляющих и стимулирующих сигналов.
Существующие методы магнитной толщинометрии защитных покрытий следует различать прежде всего по способу регистрации изменения магнитных свойств системы «толщиномер - неферромагнитное покрытие - ферромагнитная подложка».
Наиболее известными методами являются пондеромоторный, магнитостатический и индукционный. Последний способ является наиболее современным и, на сегодняшний день, наиболее распространённым.
Первоначально широкое распространение получили толщиномеры пондеромоторного принципа действия, работа которых основана на измерении силы отрыва или притяжения постоянных магнитов и электромагнитов к контролируемому объекту. Измерения производят из расчёта того, что сила притяжения магнита пропорциональна квадрату индукции в зазоре между ферромагнитным изделием и намагниченым телом. Индукция, как было показано выше, зависит от напряжённости поля намагничивания и от величины зазора между магнитом и ферромагнитным изделием.
9.Основной недостаток приборов пондеромоторного принципа действия - цикличность процесса измерения, связанная с необходимостью установки магнита и измерения силы его отрыва в каждой новой точке измерения.
10. 2. Действие магнитостатических толщиномеров основано на определении изменения напряжённости магнитного в цепи электромагнита или постоянного магнита при изменении расстояния между ним и ферромагнитным изделием из-за наличия немагнитного покрытия. Информация о толщине покрытия фиксируется магниточувствительными элементами, расположенных либо между полюсами магнита (в магнитной нейтрали), либо около одного из его полюсов. Датчики магнитостатических толщиномеров имеют, таким образом, магнитную основу, что позволяет в процессе проведения измерений «примагничивать» их к поверхности исследуемых деталей. В качестве магниточувствительных элементов могут использоваться такие устройства как рамки с током, магнитные стрелки, феррозонды, датчики Холла и другие.
11. 
12. 
13. Рис.1.Схема действиямагнитостатическихтолщиномеров:
14. а - с П-образным электромагнитом; б - со стержневым постоянным магнитом; 1 - электромагнит; 2 -- ферромагнитная деталь;
15. 3 - немагнитное покрытие; 4 — преобразователь Холла; 5 -измерительный прибор; 6 — постоянный магнит
Дата добавления: 2015-12-16; просмотров: 1247;