Статические и динамические характеристики нагрузки
При исследовании устойчивости нагрузки СЭС необходимо располагать статическими и динамическими характеристиками основных потребителей электрической энергии. Вид характеристик нагрузки определяется параметрами электроприемников, а также влиянием потерь мощности и напряжения в элементах распределительной сети.
Статические характеристики нагрузки представляют собой зависимости между параметрами режима при медленных изменениях процессов, например зависимости  для синхронных и
для синхронных и  для асинхронных двигателей. Узлы нагрузки характеризуются обычно статическими характеристиками в виде зависимостей потребляемых активной Р и реактивной Q мощностей от медленно изменяющегося напряжения U. Графическое изображение этих характеристик показано на рис. 38. Форма их зависит от вида нагрузки (лампы накаливания, асинхронные и синхронные двигатели, электрические печи и др.). Для сравнения статические характеристики некоторых потребителей изображены на рис. 39.
для асинхронных двигателей. Узлы нагрузки характеризуются обычно статическими характеристиками в виде зависимостей потребляемых активной Р и реактивной Q мощностей от медленно изменяющегося напряжения U. Графическое изображение этих характеристик показано на рис. 38. Форма их зависит от вида нагрузки (лампы накаливания, асинхронные и синхронные двигатели, электрические печи и др.). Для сравнения статические характеристики некоторых потребителей изображены на рис. 39.
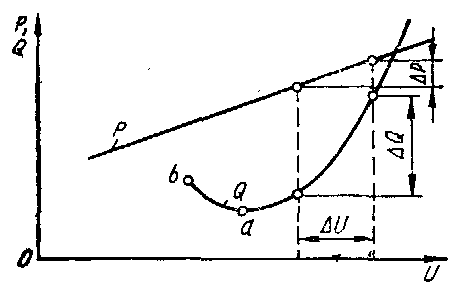
Рис. 38. Статические характеристики узла нагрузки
В аналитических расчетах статические характеристики часто аппроксимируются полиномами вида

 (81)
(81)
где  - постоян-е коэф-ты.
- постоян-е коэф-ты.
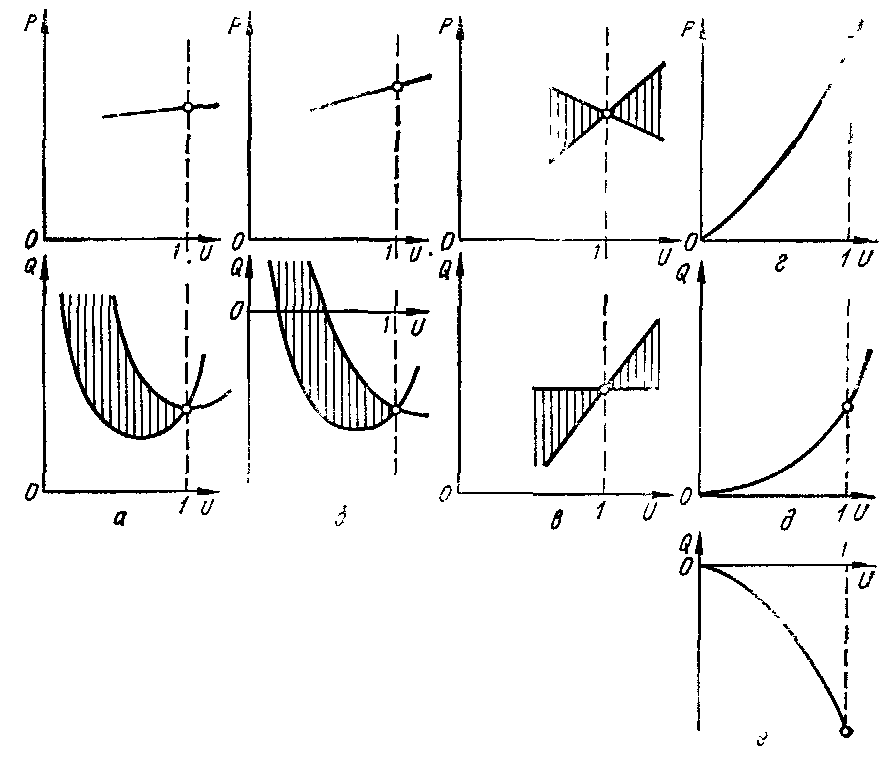
Рис. 39. Статические характеристики различных электроприемников:
а — асинхронный двигатель; б — синхронный двигатель; в —потери в последовательных сопротивлениях; г —лампы накаливания; д — потерн на намагничивание трансформаторов; е — конденсаторные батареи
Аналитические зависимости (82) и графические представления нагрузок (см. рис. 38 и 39) достаточно точно отражают их изменения только при установившихся режимах, наступающих через десятки секунд после изменения напряжения.
Последнее условие важно иметь в виду при выполнении расчетов с последовательным изменением параметров режима или свойств СЭС. Если период времени между рассматриваемыми режимами измеряется минутами, то существенными могут оказаться дополнительные изменения нагрузки, вызываемые как случайными факторами, так и действиями обслуживающего персонала на подстанциях в результате переключения ответвлений трансформаторов, изменения тока возбуждения синхронных двигателей и компенсаторов.
При анализе переходных процессов в узлах нагрузки необходимо учитывать влияние регулирующих устройств. Если зоной нечувствительности и дискретностью регулирования трансформаторов с РПН пренебречь, то напряжение на шинах электроприемников можно считать неизменным, а активную нагрузку в этом диапазоне практически постоянной. Реактивная мощность узла нагрузки представляет собой сумму реактивной нагрузки потребителей и потерь в трансформаторах с РПН, зависящих от напряжения в узле. Если потери невелики, то в рассматриваемом диапазоне реактивная мощность также почти постоянна.
При расчетах статической устойчивости СЭС обычно пользуются типовыми статическими характеристиками комплексной нагрузки, составляемыми проектными организациями для определенных групп потребителей СЭС,
При расчетах динамической устойчивости СЭС нагрузку также можно описывать статическими характеристиками. Однако это приводит к заметным погрешностям, поскольку зависимости мощности от напряжения в переходном и установившемся режимах разные. Так, при возникновении КЗ напряжение снижается практически мгновенно. По мере изменения питающего напряжения и скольжения двигателей в режиме КЗ изменяется также мощность, а при отключении КЗ возникает новый скачок активной и реактивной мощностей. Такие процессы можно представить в координатах Р, U и Q, U динамическими характеристиками, описывающими изменение указанных параметров во времени.
Динамические характеристики нагрузки определяются не только параметрами нагрузки, но и параметрами СЭС и режимами всей ЭЭС. Разница между статическими и динамическими характеристиками дает ту погрешность, которая возникает при использовании статических характеристик в расчетах динамической устойчивости СЭС.
Изменение скольжения асинхронного двигателя приводит к резкому изменению его эквивалентного сопротивления, что вызывает изменение токов статора и ротора, а также перераспределение той части электромагнитной энергии, которая при установившемся скольжении преобразовывалась в механическую. При этом часть
ее тратится на изменение запаса энергии в индуктивностях электродвигателя. Появляется запаздывание в изменении динамических моментных характеристик по отношению к характеристикам при медленных изменениях режима (статическим характеристикам). Динамика наброса и сброса нагрузки показана на рис. 40, где цифрой 1 обозначена статическая характеристика асинхронного двигателя в нормальном режиме, цифрой 2 - динамическая характеристика при набросе нагрузки, а цифрой 3 -динамическая характеристика при сбросе нагрузки.
Из рис. 40 следует, что электромагнитный момент двигателя по динамической характеристике изменяется с некоторым запаздыванием по отношению к статической характеристике.
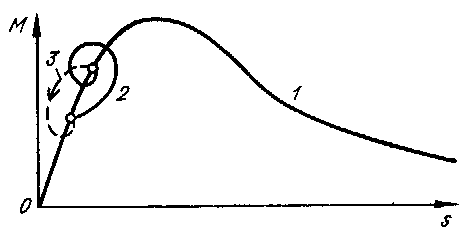
Рис. 40. Характеристики асинхронного двигателя
Значения величин, характеризующих скольжение асинхронного двигателя, а также условия устойчивости и изменение его тока, отличаются от значений этих же величин, определенных применительно к статической характеристике двигателя. Приближенно считают, что погрешность в оценке изменения скольжения обратно пропорциональна механической постоянной инерции электродвигателя Tj и прямо пропорциональна квадрату сброса или наброса нагрузки. Так, погрешность в определении скольжения маломощных электродвигателей (Tj = 0,5-1 с) достигает 10-30 °/о через 0,1— 0,3 с после наброса нагрузки,, а для мощных электродвигателей (Tj = 8-10 с) она находится в пределах точности расчетов.
При учете динамических характеристик синхронных двигателей следует учитывать ту особенность, что резкие изменения режима их работы вызывают появление свободных токов, поддерживающих результирующее потокосцепление обмотки возбуждения неизменным.

Рис. 41. Наброс нагрузки на синхронный двигатель при постоянстве э. д. с  (а), его угловые характеристики мощности при набросе нагрузки (б) и характер изменения угла δ (в)
(а), его угловые характеристики мощности при набросе нагрузки (б) и характер изменения угла δ (в)
Развиваемая синхронным двигателем максимальная мощность определяется при t = 0 по его угловой характеристике ,построенной для  . Пусть при t = t0 и δ = δ0 происходит мгновенный наброс мощности от Р0 до Р1(рис. 41, а). В этом случае переходный процесс описывается характеристикой Pi (δ), изображенной на рис. 41,б.
. Пусть при t = t0 и δ = δ0 происходит мгновенный наброс мощности от Р0 до Р1(рис. 41, а). В этом случае переходный процесс описывается характеристикой Pi (δ), изображенной на рис. 41,б.
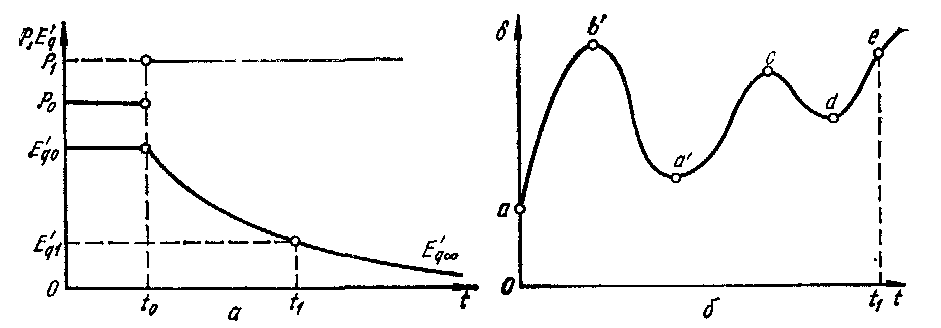
Рис. 42. Наброс нагрузки на синхронный двигатель при затухании э. д. с. (а) и характер изменения угла δ (б)
Качания двигателя определяются участком угловой характеристики мощности и соответствующими площадями ускорения и торможения на нем. Изменение угла δ во времени изображается кривой, показанной на рис.41,в.
Если имеет место затухание э. д. с. (рис. 42, а), то процесс изменения угла δ определяется не характеристикой ab, aхарактеристикой аb (см. рис. 41, б и 42, б),
Таким образом, при расчете устойчивости синхронных двигателей следует иметь в виду, что допущение справедливо только в течение малого интервала времени  и может: привести к ошибкам в оценке характера переходного процесса.
и может: привести к ошибкам в оценке характера переходного процесса.
Если э. д. с. в процессе своего затухания уменьшится так, что при  максимальное значение
максимальное значение  [точка е на характеристике
[точка е на характеристике  , см. рис. 41, б]будет меньше Р1 то устойчивость электродвигателя через время нарушится.
, см. рис. 41, б]будет меньше Р1 то устойчивость электродвигателя через время нарушится.
Дата добавления: 2015-12-08; просмотров: 7029;