Форматы и система команд микроЭВМ «Электроника-60».
В микро-ЭВМ «Электроника-60» имеется девять форматов команд (рис. 6).
Каждый формат характеризуется числом, смыслом и размером информационных полей команд. На рисунке приняты следующие обозначения полей команд: КОП – код операции, DD – 6-разрядное поле приемника результата операции, SS – 6-разрядное поле источника данных, R – 3-разрядное поле для записи номера регистра общего назначения, XX – 6-разрядное поле для записи смещения, XXX – 8-разрядное поле для записи смещения. Кроме того, N, Z, V и С — поля признаков результата. Поясним теперь каждый из форматов, представленных на рис. 6.
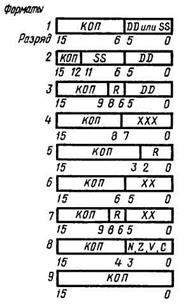
Рис. 6. Форматы команд микроЭВМ «Электроника-60».
В командах формата 1 второе поле отведено для адресации операнда, причем этот операнд в подавляющем большинстве команд данного формата относится к приемнику. Единственным исключением является команда MTPS, реализующая запись информации в слово состояния процессора. В этой команде второе поле используется для адресации операнда-источника. Операнд при этом содержит подлежащую записи информацию.
Формат 2 соответствует двухоперандным командам. В зависимости от режимов адресации операнда-источника и операнда-приемника команды этого формата могут быть однословными (в регистровом режиме адресации обоих операндов), двухсловными и трехсловными.
По формату 3 функционирует единственная команда XOR, реализующая операцию «Исключающее ИЛИ». В зависимости от режима адресации операнда-приемника команда может быть однословной или двухсловной.
Формату 4 подчиняются однословные команды ветвления. В 8-разрядном поле смещения (поле XXX) записывается в дополнительном коде значение смещения, выраженное в словах, относительно адреса команды ветвления. Смещение может принимать значения от -128 до +127 слов.
Формату 5 подчиняется единственная однословная команда RTS, реализующая возврат из подпрограммы. В поле R должен находиться номер регистра общего назначения, содержащего адрес возврата.
Формат 6 отличается от формата 4 лишь длиной поля смещения. Формату соответствует единственная команда MARK, восстанавливающая указатель стека во время выхода из подпрограммы.
Формату 7 соответствует единственная однословная команда SOB, осуществляющая вычитание единицы из содержимого регистра, указанного в поле R, и ветвление, если после вычитания содержимое регистра будет отлично от 0. Адрес ветвления определяется вычитанием из текущего значения счетчика команд удвоенного значения величины, хранящейся в 6-разрядном поле смещения. Следовательно, команда может быть использована для управления счетчиком и ветвления «назад».
Команды формата 8 используются для установки или сброса признаков N, Z, V, С в слове состояния процессора. При установке или сбросе (в зависимости от кода операции) одного из признаков соответствующее ему поле в коде команды содержит единицу. Фактически в командах формата 8 отсутствуют операнды, так как мнемоническое обозначение операции определяет собой код операции, а также и состояние полей N (знак), Z (нуль), V (переполнение) и С (перенос), которые являются условиями переходов.
Команды формата 9 не содержат полей для адресации операндов. Этому формату подчиняются команды управления прерыванием IOТ, ЕМТ, TRAP, BPT, а также специальные команды HALT, WAIT, RESET, RTI, RTT, NOP.
Литература:
1. Л.Н. Преснухин «Микропроцессоры» ч. 1, стр.: 374-377.
2. В.В. Стрыгин «Основы вычислительной, микропроцессорной техники и программирования», стр.: 139-141.
3. Б.Я. Лихтциндер «Микропроцессоры и вычислительные устройства в радиотехнике», стр.: 144-150.
ЗАНЯТИЕ 3.4.3 Назначение и состав программного обеспечения микроЭВМ.
ЗАНЯТИЕ 3.4.4 Назначение и состав программного обеспечения микроЭВМ
«МС1201».
ВОПРОСЫ ЗАНЯТИЯ:
1. Общие сведения о программном обеспечении микроЭВМ.
2. Операционные системы общего назначения. Операционная система микроЭВМ «МС1201».
3. Системы программирования.
ПЕРВЫЙ ВОПРОС
Состав базового программного обеспечения микроЭВМ:
- операционные системы общего назначения типа РЛФОС, ФОДОС, ОС ДВК;
- системы программирования Макро, Бейсик, Фортран, Паскаль, Си, Модула-
2;
- системные программы общего пользования, включая отладчики, различные
редакторы текстов общего назначения;
- тестовая операционная система типа ТМОС (тест мониторная операционная
система).
В настоящее время все большее распространение получают универсальные программные комплексы, называемые пакетами прикладных программ (ППП). Это система прикладных программ, предназначенная для решения задач определенного класса. Связь с ППП осуществляется на языке более высокого уровня, чем проблемно-ориентированные языки. Создание ППП, которые могут быть общими для многих пользователей, освобождает программистов от дублирования в разработке программ, которые могут быть общими для многих пользователей, ускоряет процесс разработки программ и сокращает время, необходимое для внедрения задачи.
В настоящее время фонд алгоритмов и программ (ФАП) насчитывает большое число пакетов для различных приложений.
Отличительная черта современных ППП в том, что они снабжены входным языком, позволяющим оформить задание пакету на уровне содержательного описания, близкого к описанию на естественном разговорном языке. Составленное таким образом задание анализируется специальной программой-монитором, входящей в системную часть пакета, и для его выполнения генерируется соответствующая вычислительная схема, по которой будет выделен необходимый набор программ из библиотеки пакета.
Следовательно, в цепи пользователь — ЭВМ есть еще один уровень иерархии: система машинных команд → общесистемное программное обеспечение → пакеты прикладных программ → программа пользователя.
Пакеты прикладных программ, прежде всего, различаются по функциям, которые они выполняют. Например, генератор ввода предназначен для организации ввода данных, контроля их, компоновки и организации хранения; генератор вывода, напротив, организует редактирование данных из внутреннего представления к форме выдачи их на терминальные устройства; системы управления базами данных предназначены для управления хранением данных, созданием поколений данных, слежением за их обновляемостью, поиском данных по запросу пользователя и т. д.
В настоящее время все большее внимание уделяется созданию комплексов ППП, способствующих автоматизации проектирования АСУ. Примером такого комплекса может служить обще системное математическое обеспечение (ОСМО), объединяющее в себе следующие функции: ввод данных с различных типов носителей (перфокарты, перфоленты, магнитные ленты и диски); контроль документов данных; организация метабазы данных; организация обработки данных и обмена данных, хранимых на различных устройствах памяти; вывод данных с широкими возможностями их форматирования.
По способу реализации входного задания пакеты могут быть обрабатывающие и производящие. Обрабатывающие пакеты организуют заранее предусмотренную последовательность программных модулей, ориентированную на конкретную задачу. Переменными на входе могут быть лишь сами данные, их описания. Производящие пакеты способны генерировать последовательности программных модулей, необходимые для реализации тех задач, которые могут быть описаны входным языком.
Классификационными признаками пакетов могут быть также уровень входного языка, тип транслятора; уровень адаптируемости к различным представлениям данных; сфера применимости; степень открытости; требование к уровню подготовленности пользователя и др.
Пакеты прикладных программ выборочно конструируют последовательность выполнения программ применительно к заданию пользователя. Такие последовательности могут быть различными.
Для выборочного конструирования нужной последовательности необходимо, чтобы каждая программа была выполнена в виде отдельного модуля, стыкуемого с остальными модулями. Такая стыковка называется сопряжением или интерфейсом. Интерфейс — это совокупность средств и правил, обеспечивающих взаимодействие программ. Интерфейс в значительной мере определяет как быстродействие, так и надежность выполнения задачи. Кроме того, организация интерфейса обеспечивает расширение функциональных возможностей пакета, замену одних модулей другими без существенных переработок.
Модульное программирование позволяет разделить большую программу на иерархическую совокупность менее трудоемких частей, которые могут выполняться параллельно. Каждая такая часть реализует определенную функцию, легко обозримую и анализируемую, что позволяет быстро сформулировать техническое задание на ее программирование, тщательно реализовать и отладить программный модуль. Кроме того, отдельные программные модули могут быть использованы в качестве составных частей при программировании других задач. Поэтому выделение программных модулей в библиотеку для повторного их использования ведет к увеличению производительности труда программистов и снижению затрат на оформление технической документации, так как документация в таком случае оформляется помодульно и может быть размножена.
ВТОРОЙ ВОПРОС
Любая современная ВС (вычислительная система), в том числе и микропроцессорная ВС, состоит из двух главных взаимосвязанных и взаимодействующих компонентов: аппаратуры и программного обеспечения.
Основу программного обеспечения ВС образует, как правило, некоторая операционная система, представляющая собой совокупность специальных программ, предназначенных для управления всеми аппаратурными и программными ресурсами ВС, облегчения процесса создания и отладки новых программ, автоматизации их прохождения через вычислительную машину, управления файлами, повышения пропускной способности ВС и производительности труда обслуживающего персонала. Операционная система является посредником между ЭВМ и ее пользователями и, как таковая, осуществляет анализ и интерпретацию запросов каждого пользователя и обеспечивает их должное выполнение. Запрос пользователя отражает необходимые ресурсы и требуемые действия ВС и представляется в виде задания на особом языке, называемом языком управления заданиями. Опубликованная к настоящему времени литература на русском языке по операционным системам довольно обширна. Однако в ней основное внимание уделяется, как правило, операционным системам для средних и больших ЭВМ, например машин системы IBM-360 и ЕС ЭВМ. В то же время общие вопросы организации и функционирования операционных систем для микроЭВМ освещены менее глубоко, причем соответствующие публикации не всегда доступны студентам
Чаще операционная система ОС микроЭВМ состоит из относительно компактного ядра — монитора — и набора системных программ и данных ПС и ДС (рис. 1). Монитор предназначен для организации взаимодействия пользователей с микро-ЭВМ, запуска и контроля выполнения системных программ и программ пользователей, слежения за выполнением операций ввода — вывода, управления распределением оперативной памяти микро-ЭВМ и манипулирования файлами. Таким образом, монитор с функциональной точки зрения подобен управляющей программе в операционной системе большой ЭВМ. Как правило, весь монитор или некоторая его часть, называемая резидентной, часто с момента загрузки и запуска операционной системы постоянно находится в оперативной памяти микро-ЭВМ. Компоненты монитора, не входящие в резидентную часть, загружаются в оперативную память микро-ЭВМ по мере необходимости, а после выполнения требуемых действий освобождают занимаемые ими области памяти для других компонентов монитора, системных программ или программ и данных пользователя (ПП и ДП).
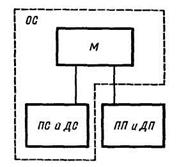
Рис 1. Важнейшие группы компонентов в программном обеспечении микро-ЭВМ:
М — монитор, ПС и ДС — программы и данные системы; ПП и ДП — программы и данные пользователя.
В группу системных программ и данных ПС и ДС могут входить трансляторы и интерпретаторы языков программирования, редактор текстов, редактор связей программных модулей, программа для реализации библиотечных операций («библиотекарь»), отладчик программ, драйверы внешних устройств, тестовые программы, библиотеки исходных, объектных и загрузочных программных модулей, библиотека макрокоманд и т. п.
Важной проблемой организации операционной системы микроЭВМ является выбор машинного носителя для постоянного хранения ее компонентов, а также программ и данных пользователя ПП и ДП. В простейшем случае в качестве такого носителя может использоваться перфолента, как это сделано, например, в перфоленточной операционной системе микро-ЭВМ «Электроника-60». Однако применение такой операционной системы сопряжено с существенными неудобствами, так как требует большого ручного труда оператора при вводе компонентов операционной системы с перфоленточного устройства в оперативную память микро-ЭВМ.
Более совершенным носителем программ операционной системы и программ пользователей применительно к микроЭВМ является кассетный накопитель на магнитной ленте (КНМЛ). Хотя быстродействие операционной системы на кассетном НМЛ может быть недостаточно высоким для тех или иных применений микро-ЭВМ, в целом такая операционная система гораздо более удобна для пользователя, чем перфоленточная.
В настоящее время наиболее распространенным машинным носителем программно-информационного обеспечения микро-ЭВМ являются накопители на гибких магнитных дисках (НГМД), которые характеризуются довольно большим объемом памяти, малым временем доступа, простотой применения, компактностью и низкой стоимостью. Накопители на ГМД дают возможность создавать весьма развитые ОС для микро-ЭВМ, как например, дисковая операционная система ФОДОС для микро-ЭВМ «Электроника-60».
Организация микропроцессорной системы в значительной мере зависит от ее функционального назначения и режима работы. С точки зрения функционального назначения операционная система может быть ориентирована на выполнение заданий пользователей в пакетном или диалоговом режиме или на управление некоторыми устройствами, связанными с микро-ЭВМ каналами передачи данных, в реальном масштабе времени. Возможно и совмещение названных функций.
Микропроцессорная операционная система с ориентацией на работу в пакетном или диалоговом режиме может быть однопрограммной или мультипрограммной. Однопрограммная операционная система обычно рассчитана лишь на одного пользователя, в то время как мультипрограммная операционная система может обслуживать одновременно несколько пользователей. В мультипрограммном режиме работает, как правило, и такая микропроцессорная операционная система, которая ориентирована на управление устройствами и процессами в реальном масштабе времени.
Операционные системы реального времени с разделением функций типа РАФОС, ФОДОС, ОС ДВК по своим функциональным возможностям позволяют организовывать вычислительный процесс в ЭВМ, имеющих ОЗУ емкостью 16..56 Кбайт и более, обслуживают широкий набор ПУ, входящих в состав ЭВМ
Возможности ОС:
- одновременное решение одной (под управлением SJ-моиитора) или двух (под
управлением FB-монитора) задач;
- организация связи пользователя с ЭВМ на уровне команд монитора или
конкретной системы, работающей под управлением монитора;
- сопровождение системы файлов на ВЗУ;
- организация трансляции, редактирования иотладки.
Однозадачный SJ-монитор функционирует при минимальной конфигурации технических средств ЭВМ, занимает 4 Кбайт памяти ОЗУ, имеет высокое быстродействие ипрограммно совместим с FB-монитором.
Двухзадачний FB-монитор одновременно выполняет две задачи: оперативную – с наивысшим системным приоритетом относительно фоновой; фоновую – в реальном времени с меньшим приоритетом по сравнению с оперативной задачей. Такой FB-монитор занимает 8 Кбайт и обеспечивает работу с ОЗУ емкостью 24...56 Кбайт. Он имеет развитые средства программирования дополнительных терминалов. Основное применение FB-монитора — системы автоматизации лабораторных экспериментов и решение прикладных задач в реальном времени, не требующих ОЗУ большой емкости.
Управление системой выполняется с помощью команд монитора — языка, позволяющего с системного терминала получать справочную информацию о системе, загружать в ОЗУ системные и прикладные программы, выполнять копирование, стирание, переименование файлов, вывод каталога, задание даты и др.
Команды задаются в двух вариантах — полном и кратком. В каждом случае дополнительная информация на задания вводится из ЭВМ. Некоторые команды допускают задание групповой операции в спецификации файла.
Файловая система. В состав монитора ОС входят программные средства организации файлов на ГМД.
Для ВЗУ с прямым доступом допускается организация простых и иерархических файловых структур. При этом отдельный файл может рассматриваться в качестве носителя, имеет сложную структуру и содержит каталог файлов, расположенный в нем. Эти средства обеспечивают отдельным пользователям файлов ограниченный доступ к информации, расположенной в «чужих» файлах, и защиту файлов остальных пользователей, размещенных на одном и том же физическом носителе.
Работа с ПУ реализуется с помощью набора драйверов, представляющих собой программный компонент управляющей системы. Наборы драйверов хранятся в отдельном файле на системном ВЗУ, что позволяет легко включать в состав ОС драйверы для новых устройств.
Системные программы общего назначения: для работы с файлами, обслуживания устройств, распечатки каталога, коррекции объектных и любых файлов, форматирования дисков, компоновщик, библиотекарь, редактор общего назначения, экранные редакторы, форматирования текстов, абсолютной загрузки, отладчик, сравнения носителей, распечатки файлов, сравнения файлов.
Операционная система реального времени микро-ЭВМ.
Общие сведения об операционных системах реального времени. Важное значение во многих применениях микро-ЭВМ имеют операционные системы реального времени (ОС РВ). Каждая ОС РВ предназначена прежде всего для того, чтобы отслеживать и определенным образом реагировать на многочисленные и, в общем, разнотипные события, возникающие независимо друг от друга в реальном времени. Такими событиями могут быть генерирование очередного импульса от таймера, поступление кода некоторого знака с внешнего устройства или из канала связи, возникновение сигнала прерывания того или иного типа, истечение заданного интервала времени и т. п. Реакция на событие зависит от его класса. Например, в случае генерирования очередного импульса от таймера ОС РВ может увеличить на единицу времени показание системных часов и запустить программу сканирования некоторых датчиков.
Основная единица работы ОС РВ — задача. Задача — это процесс, развитие которого определяется некоторой программой, выделенными ресурсами, а также другими процессами. Из определения задачи видно, что понятия «задача» и «программа» не совпадают, хотя нередко в литературе по операционным системам их различие и не отмечается.
Как правило, ОС РВ обеспечивает параллельное выполнение многих задач. В однопроцессорной вычислительной системе параллельное выполнение задач реализуется достаточно частым переключением процессора с одной задачи на другую. Последовательность переключений процессора, а также интервал занятости его выполнением каждой из задач до переключения на какую-нибудь другую задачу регулируются с помощью приоритетов, назначаемых задачам. Для операционной системы приоритет является одной из важнейших характеристик задачи. В
простейшем случае приоритет задачи фиксирован. В более общей ситуации приоритет каждой из задач, выполняемых под управлением ОС, может изменяться во времени. Характер изменения приоритета может зависеть от длительности пребывания задачи в очереди к процессору, длительности использования процессорного времени, числа интервалов занятия процессора задачей и т. д.
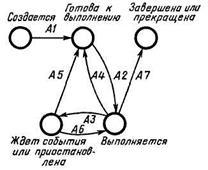
Рис. 2. Диаграмма состояний задачи.
Каждая задача во время своего выполнения проходит ряд состояний, число которых может быть очень велико, если принимать во внимание все переменные задачи. Однако операционная система различает чаще всего следующие укрупненные состояния задачи:
1) активности, или выполнения;
2) приостановки или ожидания некоторого события;
3) готовности к началу или продолжению выполнения.
Кроме того, следует учесть также состояние, в котором задача только создается, и состояние завершенности или прекращения выполнения. На рис. 2 представлена диаграмма важнейших состояний задачи, выполняющейся под управлением операционной системы. Здесь Al, A2, ... ..., А7 — группы причин, приводящих к изменению состояний задачи. Группа А1 содержит обычно единственную причину — завершение создания задачи. В группу А2 могут входить, например, такие причины, как освобождение процессора от выполнения более приоритетных задач или наступление момента для выделения данной задаче кванта процессорного времени (при циклическом обслуживании совокупности задач). Типичными причинами из группы A3 являются, например, инициирование выполняющейся задачей операции ввода данных, без которых эта задача не может продолжать свое выполнение, или затребованная самой задачей определенная длительность приостановки своего выполнения. Причинами из групп А4 могут стать, например, готовность к выполнению более приоритетной задачи или истечение фиксированного кванта процессорного времени. В группы А5 и А6 может входить одна и та же причина — наступление события, ожидаемого задачей или выводящего задачу из состояния приостановки. Если выполняемая в этот момент задача имеет более высокий приоритет, то задача с закончившимся ожиданием перейдет в состояние «Готова к выполнению». В противном случае эта задача может сразу перейти в состояние выполнения, прервав при этом выполнение менее приоритетной задачи. И наконец, причинами из группы А7 могут быть нормальное завершение или возникновение неисправимой ошибки в задаче.
К настоящему времени создан целый ряд ОС РВ для различных микроЭВМ. При всем разнообразии таких систем в них можно выделить следующие основные компоненты:
1) планировщик задач;
2) диспетчер;
3) обработчик прерываний;
4) программа отслеживания времени;
5) супервизор ввода — вывода.
Планировщик задач и диспетчер образуют управляющую программу, или монитор. Планировщик осуществляет выбор задач, которые должны быть подготовлены к выполнению. Функция диспетчера состоит в том, чтобы инициировать выполнение задачи, выбранной планировщиком, или продолжить ее выполнение из состояния готовности или ожидания. Задача, получившая управление от диспетчера, захватывает процессор до своего полного завершения, прекращения (например, при ошибке или вмешательстве оператора) или перехода в состояние ожидания. После освобождения процессора от выполнения текущей задачи управление возвращается планировщику для выбора другой задачи, подлежащей выполнению.
На рис. 3 приведен пример схемы алгоритма, иллюстрирующий работу простого планировщика задач. Предполагается, что планировщик получает управление при периодическом прерывании от таймера, а также в случае завершения какой-либо задачи. Прерывание от таймера дает возможность находящейся в очереди задаче более высокого приоритета, чем приоритет текущей выполняемой задачи, «захватить» процессор. Данный планировщик включает в себя и функции диспетчера задач, относящиеся к инициированию задачи или продолжению ее выполнения. На рис. 4 представлен пример временной диаграммы, поясняющий работу описанного планировщика с задачами трех приоритетных уровней. Для простоты предполагается, что интервалы работы планировщика пренебрежимо малы по сравнению с интервалами выполнения задач, и
поэтому они представлены, как и прерывания от таймера, вертикальными черточками; интервалы выполнения задач заштрихованы наклоненными влево линиями; интервалы приостановки заштрихованы наклоненными вправо линия-
ми, а интервалы нахождения в очереди (начиная с момента возникновения задачи) не заштрихованы; переключения процессора с задачи одного приоритета на задачу другого приоритета показаны пунктирными вертикальными стрелками.

Рис. 3. Схема упрощенного алгоритма функционирования планировщика задач в ОС РВ.
Обработчик прерываний осуществляет обработку различных типов прерываний с сохранением состояния прерываемых задач. Изменение состояния задач отражается в системных таблицах. Обычно обработчик прерываний завершает свои операции передачей управления планировщику задач, который на основе анализа таблиц и учета текущих состояний и приоритетов задач выбирает для выполнения новую задачу или для продолжения выполнения — прерванную задачу.
Программа отслеживания времени осуществляет периодическое наращивание абсолютного времени по прерываниям от таймера, а также реализует задаваемые различными задачами интервалы временной задержки. Как правило, программа отслеживания времени имеет наивысший приоритет в системе и выполняется при каждом прерывании от таймера. После завершения этой программы управление получает планировщик задач.
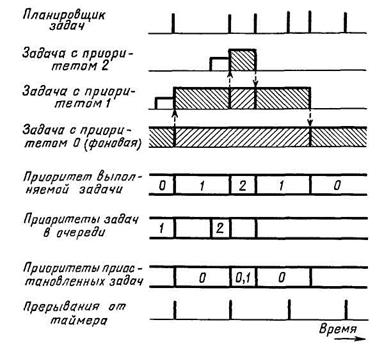
Рис. 4. Временная диаграмма работы планировщика задач
в ОС РВ с задачами трех приоритетных уровней.
Супервизор ввода — вывода предназначен для реализации операций ввода — вывода, запрашиваемых в выполняемых задачах. Запросы на ввод — вывод представляются обычно в виде макрокоманд, с каждой из которых ассоциируется некоторый список параметров, определяющих адреса и объем данных, подлежащих вводу или выводу. Обеспечивая должную буферизацию данных, супервизор полностью освобождает разработчика прикладных программ от необходимости детального программирования операций ввода — вывода и тем самым существенно облегчает его труд.
Тестовая операционная система типа ТМОС. Предназначена для проверки работоспособности ЭВМ, а также для поиска и локализации неисправностей.
Состав тестовых программ рассмотрим на примере ТМОС ДВК:
Назначение теста Наименование файлов
Вызов тестовых программ...... FT MON.SAV
Основной тест команд........ ALB.SAV
791401.TMS
Тест прерываний.......... 791404 TMS
Тест памяти............ 791323.TMS
Тест символьного дисплея...... 01210I.TMS
Системный тест.......... 791407 TMS
Тест УПО............ 005101.TMS
Тест DZM-180........... 013101.TMS
Тест обмена с НГМД-7012...... 014102.TMS
Тест печатающих устройств...... TESTPU.SAV
Тест НГМД-6022, НГМД-6021..... TSTGMD.SAV
Программа форматирования
Носителей (дисков) на НГМД-6022,
НГМД-6021 . . FORMAT.SAV
Каждый тест является циклическим. Для останова теста необходимо перейти в режим пультового терминала и набрать команду 40024G. После запуска и работы теста останов происходит по адресу 32. Продолжение работы осуществляется посредством команды 2C0G.
ТРЕТИЙ ВОПРОС
Макроассемблер обеспечивает доступ ко всем средствам, предоставляемым системой. Язык включает в себя средства условной трансляции, макропроцессор и развитую систему управления транслятором для генерации листингов и таблиц перекрестных ссылок. Макроассемблер может использовать расширенную арифметику, библиотеку, макрокоманды пользователя и системы. Транслятор не ограничивает размер транслируемой программы.
Фортран IV удовлетворяет требованиям стандарта, содержит операторы, обеспечивающие дополнительные средства работы с файлами, форматный и неформатный, а также списковый ввод-вывод для упрощения процесса отладки при выводе промежуточных результатов.
Исполняющая система Фортран IV расширена включением в ОС объектной библиотеки, содержащей наборы подпрограмм, допускающих вызов из программ на языке Фортран и работу со строковыми данными, с 32-рарядными целыми числами, доступ к средствам ОС уровня системных макрокоманд.
Бейсик содержит стандартные средства, обеспечивающие диалоговый режим работы, интерактивный способ отладки программ и др. В состав ОС включен интерпретатор, имеющий ряд дополнительных возможностей, в том числе работу со строками и целыми числами, управление файлами, размещенными на различных ВЗУ, средства расширения на языке Макроассемблер и др.
Паскаль. В ОС входит развитый набор программных компонентов для программирования на языке Паскаль. Компилятор обеспечивает трансляцию с входного языка Паскаль на язык макроассемблера. Отладка программ осуществляется в интерактивном режиме с использованием символических обозначений, применяемых в исходном тексте программ. Отладчик программ на языке Паскаль включен в состав библиотеки исполняющей системы.
Имеются дополнительные служебные программы, написанные на языке Паскаль: оптимизация текста программы на язык Макроассемблер; форматирование исходного текста программ; проверка ее блочной структуры; распечатка таблиц перекрестных ссылок.
Модула-2 — универсальный язык программирования, обеспечивающий создание больших программ, разрабатываемых несколькими программистами. Язык использует модульный принцип, широкий набор утилит, включающих процедуры ввода-вывода, управление памятью, планирование процессов и др.
Литература:
1. В.В. Стрыгин «Основы вычислительной, микропроцессорной техники и программирования», стр.: 258-303.
2. А.А. Мячев «Персональные ЭВМ и микроЭВМ (основы организации)», стр.: 247-249.
3. Л.Н. Преснухин «Микропроцессоры» ч. 1, стр.: 439-441, 456-461.
ЗАНЯТИЕ 3.4.5 Области применения микропроцессоров и микропроцессорных систем. Оборудование с числовым программным управлением.
ВОПРОСЫ ЗАНЯТИЯ:
1. Некоторые вопросы организации применения микроЭВМ и микропроцессорных устройств.
2. Области применения микропроцессоров и микроЭВМ.
3. Применение микропроцессоров и микроЭВМ в оборудовании с программным управлением и робототехнических комплексах.
ПЕРВЫЙ ВОПРОС
Эффективность применения микропроцессорных устройств и микроЭВМ в той или иной области техники зависит от успешного решения широкого круга производственных и организационных вопросов, таких как выбор первоочередных применений, организация взаимодействия поставщика и потребителя микро-ЭВМ; формирование коллектива по разработке аппаратуры на базе микро-ЭВМ.
Выбор первоочередных примененийявляется чрезвычайно важной задачей, так как успех первой разработки служит хорошей гарантией дальнейшего развития работ по применению микропроцессоров не только в конкретном коллективе, но часто и в целой отрасли техники, а неудача может на много лет дискредитировать саму идею применения.
В качестве первоочередного необходимо выбирать то применение, которое является эффективным и может быть сделано быстро.
Быстрота реализации зависит от вида разработок новых образцов изделий, использующих микроЭВМ или микропроцессоры. В литературе часто приводится сравнительный анализ различных видов разработок и сделан вывод о том, что наиболее быстро можно реализовать ожидаемый эффект, если мы при разработке осуществляем перевод имеющейся механической, электромеханической или электронной части серийно выпускаемого изделия, осуществляющей функции управления, обработки или передачи данных, на микропроцессор или микро-ЭВМ.
ВТОРОЙ ВОПРОС
Области применения микропроцессоров и устройств, построенных на их базе, практически не ограничены. В настоящее время трудно представить ту сферу деятельности человека, где микропроцессор или микро-ЭВМ по каким-либо причинам невозможно было бы применить. Использовать их можно практически везде, нужно только определить, насколько эффективно и целесообразно их конкретное применение.
В рамках настоящего конспекта лекций не представляется возможным подробно рассмотреть области, где могут найти применение микропроцессорные устройства. Эти вопросы рассматриваются в различной литературе, на примерах конкретных структурных схем, с описанием алгоритмов работы микропроцессорных устройств. Здесь мы кратко рассмотрим лишь некоторые примеры возможного применения этих устройств.
Следует отметить, что микро-ЭВМ и микропроцессорные комплексы могут использоваться и в качестве автономных вычислительных средств (для инженерных или научных расчетов, для экономической обработки информации, для управления различными процессами и т. д.) и в качестве встраиваемых средств.
Применение микро-ЭВМ в автоматизированных системах управления технологическими процессами (АСУ ТП) существенно влияет на архитектуру таких систем. Сравнительно невысокая стоимость и массовое производство микро-ЭВМ позволяют решать задачу управления самым нижним уровнем технологических процессов, где благодаря быстродействию и точности выполнения простейших операций ЭВМ превосходит человека-оператора.
Вместе с тем низовые системы управления, точно поддерживающие заданный технологический регламент, должны работать в рамках общей иерархической структуры управления, выполняя каждый раз вполне «индивидуальную» работу. Такие системы могут применяться, например, в качестве программаторов, контроллеров для числового программного управления станками, в промышленных работах и т. д.
Программаторы– это простейшие устройства, с помощью которых на технологический объект управления выдается заранее определенная последовательность управляемых сигналов. Роль микро-ЭВМ в таких устройствах состоит в упрощении процесса перестройки режимов за счет изменения программы
На базе автономных программаторов сравнительно легко собрать комплекс управления сборочным конвейером. Такой комплекс состоит из группы программаторов, управляемых центральной ЭВМ. Для этого необходимо формат представления выходных управляющих сигналов и центральной ЭВМ сделать соответствующим интерфейсу устройства считывания с перфоленты. Это необходимо потому, что в автономном режиме такая информация в программатор вводится с перфоленты.
Примером такого комплекса может служить система с микропроцессорными терминалами на базе БИС — 8080 ицентральной миниЭВМ HP 21000,используемой фирмой Computer System (США) в комплексе управления автосборочным конвейером.
Контроллер –это устройство управления некоторым механизмом или аппаратом по жесткой программе. До появления микроЭВМ контроллеры выполнялись как чисто аппаратные средства. Однако простота и гибкость реализации в ЭВМ логических функций, а также возможность дополнительногоиспользования вычислительных алгоритмов делают применение микроЭВМ в контроллерах весьма перспективным.
Контролер отличается от программатора тем, что программатор только ведет процесс, а контроллер кроме ведения процесса выполняет функции слежения за параметром и ведет процесс до достижения параметром заданного фиксированного значения Контроллеры могут найти широкое применение в управлении различными технологическими процессами.
МикроЭВМ в станках с числовым программным управлением (ЧПУ).
Системы ЧПУ в разных по сложности станках по полноте (реализации) тех или иных функций существенно отличаются от программаторов и контроллеров. Поэтому к микроЭВМ в системах ЧПУ предъявляются более высокие требования.
Принципиальная особенность станка с ЧПУ заключается в том, что движение инструмента относительно обрабатываемой заготовки задается последовательностью положений и скоростями перемещений его рабочих органов, записываемых в программе. Поэтому эти устройства обладают высокой гибкостью, так как перестройка системы управления другой детали сводится к подготовке другой программы.
Не останавливаясь на достоинствах станков с ЧПУ, отметим, что они найдут в ближайшем будущем самое широкое применение, малые габариты микро-ЭВМ позволяют встраивать их непосредственно в станок.
Вообще надо отметить, что встраивание однокристальных одноплатных, а в отдельных случаях и многоплатных микроЭВМ в состав оборудования существенно повышает его технические и эксплуатационные характеристики.
Микропроцессорные устройства могут быть встроены и использованы для реализации многих функций управления различными узлами и устройствами, например, автомобилей, комбайнов и тракторов.
В настоящее время уже разработаны с микропроцессорные системы зажигания, управления впрыском топлива в двигателе внутреннего сгорания. Эти системы могут быть успешно использованы в тракторах и двигателях комбайнов.
Цифровая система зажигания на базе микропроцессора обеспечивает автоматическую регулировку угла опережения в зависимости от оборотов, нагрузки, режимов работы, температуры двигателя, состава смеси и этим обеспечивается существенное повышение эффективности работы двигателя. Микропроцессорная система управления впрыском топлива позволяет уменьшить загрязнение воздуха выхлопными газами и обеспечить максимально экономию топлива во всем рабочем диапазоне двигателя. Это достигается за счет оптимизации отношения количества атмосферного воздуха к количеству топлива. Такая оптимизация требует учета большого количества параметров и поэтому может быть достигнута с помощью цифрового вычислительного устройства. Таким устройствам является микропроцессорное устройство.
Микропроцессоры и микроЭВМ находят широкое применение в различных областях народного хозяйства, причем число областей применений микропроцессоров в промышленности, научных исследованиях и в бытовой технике стремительно растет.
Микропроцессоры используются во встроенных системах автоматического управления, для технологического оборудования — станков с числовым программным управлением, автоматических манипуляторов (роботов), дуговых сталеплавильных печей, сварочных машин и т. п. Современное промышленное предприятие невозможно представить без роботов, станков с ЧПУ, автоматизированных складов, гибких производственных систем (ГПС).
Применение микропроцессоров на транспорте обеспечивает не только оптимальное управление транспортными средствами, но и безопасность движения, комфорт пассажиров, учет передвижения пассажиров и грузов, оптимизацию перевозок в целом и т. д. Использование микропроцессоров для управления автомобильными двигателями должно по имеющимся прогнозам улучшить их экономичность на 10... 15 % и уменьшить токсичность выхлопных газов.
На базе микропроцессоров строятся универсальные регуляторы, предназначенные для регулирования различных величин, таких, например, как напряжение электрического тока, температура, давление, скорость вращения вала двигателя, крутящий момент, линейные перемещения и т. п. Такие универсальные регуляторы соединяются с объектом регулирования с помощью соответствующих преобразователей.
На основе использования микропроцессорных регуляторов, измерительных приборов с МП, микроЭВМ автоматизируются однотипные процессы, встречающиеся в различных областях техники.
Разработаны микропроцессорные системы контроля расхода воды в реках и ирригационных каналах. Микропроцессоры используются в системах управления работой водоочистных станций.
Микропроцессорную технику применяют для управления движением газа и нефти в газа - и нефтепроводах соответственно.
На основе применения МП и микроЭВМ разработаны устройства контроля и управления технологическими процессами в химической, нефтедобывающей и других отраслях промышленности. К ним относятся и технологические процессы в микроэлектронной промышленности, в частности процессы изготовления самих микропроцессоров.
Микропроцессоры и микроЭВМ используются в медицинской технике (регулирование движения воздуха в системах искусственной вентиляции легких и крови, управление искусственными органами, дозирование наркозных смесей и т. д.) Они применяются для диагностики различных болезней, профессионального отбора.
Широкие возможности МП и микроЭВМ позволили реализовать на их основе ряд стандартных, ориентированных на автоматизацию научных исследований измерительно-вычислительных (ИВК) и управляющих проблемно-ориентированных (ПОК) комплексов типа ИВК. Они предназначены для автоматизации общефизических (ИВК-1, ИВК-2, ИВК-20), оптических (ИВК-3) и лабораторных (ИВК-4) научных исследований, автоматизации сбора, обработки и хранения информации в различных областях науки и техники (ИВК-7, ИВК-8).
На базе ИВК создаются комплексы для автоматизации труда инженера, конструктора, программиста и т. д.:
— автоматизированные рабочие места радиоинженера (АРМ—Р), машиностроителя (АРМ—М) и технолога (АРМ—Т);
— автоматизированные рабочие места информационного работника (АРМ Реферат), проектировщика микропроцессорных устройств (АРМ 2—05) и программиста (АРМ Программист).
Кроме того, большие возможности при создании специализированных (нестандартных) автоматизированных систем научных исследований предоставляет ученому широкая номенклатура выпускаемых промышленностью микропроцессорных средств вычислительной техники. При этом пользователь может создавать системы исследований на базе нестандартных и стандартных приборов и устройств, опираясь на собственные разработки, использующие последние достижения в области микроэлектроники.
Широко применяются микропроцессоры в измерительных приборах, позволяя достичь ряда положительных результатов. Наиболее характерные требования к измерительной аппаратуре: точность и стабильность работы в течение длительного времени, в широком диапазоне воздействий дестабилизирующих факторов. Для компенсации временной и эксплуатационной нестабильности почти всегда необходима калибровка приборов непосредственно перед измерением или с некоторой периодичностью, соответствующей поверочному интервалу времени. Это относительно трудоемкая операция и часто недостаточно эффективная, поскольку параметры прибора могут довольно быстро меняться в течение времени измерения.
Одна из важных функций, возлагаемых на МП в измерительной аппаратуре, — автоматическая самокалибровка. Причем она осуществляется не только перед измерением, но и в процессе воздействия сигнала измеряемой величины на вход измерителя. Частота такой калибровки может быть достаточно большой для проведения большого числа калибровок за время одного измерения.
Микропроцессоры позволяют предварительно обрабатывать измеряемые сигналы. В результате такой обработки можно производить автоматическое усреднение результатов измерений, приведение величин к заданной размерности, выбор оптимального диапазона измерения, вычисление заданных функций и т. п., другими словами, получать от измерения именно ту информацию, которая требуется в каждом конкретном случае.
Существенное достоинство приборов, реализуемое с использованием микропроцессоров, заключается в возможности самоконтроля и диагностики приборов на их основе, т. е. в обнаружении и указании местоположения обнаруженной неисправности, а если возможно, то и устранения ее путем подключения резервных устройств или выбора подходящего режима работы. Немаловажным является уменьшение размеров, массы и энергопотребления устройств, реализованных с использованием МП.
Товары широкого потребления — потенциально наиболее массовая сфера применения МП систем. Высокая надежность и постоянно снижающаяся стоимость МП являются факторами, решающими в их пользу вопрос о выборе элементно-технологической базы для систем автоматизации управления бытовыми приборами. Не менее привлекательна возможность получения у бытовых приборов наряду с традиционными новых функций, при незначительном увеличении стоимости, что также определяет преимущества МП систем перед всякими другими.
Применение МП стимулировало появление большого количества разнообразных электронных игр, характерных, прежде всего высокой степенью «интеллектуальности». Наибольшее распространение получили карманные игры с жидкокристаллическими экранами, а также игры на базе бытовых компьютеров или выполненные в виде приставок к телевизору, подключаемых к его антенному входу.
ТРЕТИЙ ВОПРОС
Станки с числовом программным управлением (ЧПУ) находят широкое применение на производстве. Наряду с обычным оборудованием с ЧПУ распространение получили контрольно-измерительные и сборочные машины, промышленные роботы и другое оборудование с управлением от микроЭВМ. Отдельные станки с ЧПУ и многоцелевые станки объединяют в участки, включающие транспортно-складские системы, управляемые ЭВМ, системы централизованной уборки стружки и другое оборудование.
Системы числового программного управления (СЧПУ) можно классифицировать по признакам: структуре и принципу (алгоритму) управления, назначению, характеру движения привода, виду привода, способу задания программы.
По структуре управления СЧПУ делятся на замкнутые и разомкнутые.
В замкнутых СЧПУ используется задающее воздействие— управляющая
программа, а также информация о действительных значениях управляемых параметров, т. е. в этих системах используется принцип управления по отклонению управляемого параметра (гибкое управление).
Принцип управления разомкнутых СЧПУ основан на использовании только задающего воздействия, заложенного в управляющую программу (принцип жесткого управления).
По принципу управления комбинированные СЧПУ делятся на системы с замкнутыми контурами управления, работающими по принципу отклонения (при управлении основными параметрами — главное движение, движение подачи), и с разомкнутыми контурами управления (при управлении вспомогательными параметрами — закрепление заготовок, подвод инструмента, смена инструмента, включение подачи охлаждающей жидкости и т. д.).
В адаптивных СЧПУ существуют дополнительные датчики информации о параметрах процесса обработки: силе резания, температуре инструмента, износе инструмента и т. д. Эта информация используется СЧПУ для корректировки технологических параметров, заданных управляющей программой, в зависимости от изменения припуска на обработку, твердости и жесткости заготовок, состояния инструмента и т. д.
По назначению системы управления делятся на позиционные, контурные и универсальные.
В позиционных системах управления программируются координаты отдельных дискретных точек, определяющих положение — позицию инструмента или заготовки. Такие системы применяются для управления сверлильными и расточными станками. Разновидность позиционных систем управления — прямоугольные, управляющие перемещением вдоль отрезков, параллельных направляющим станка. Прямоугольные системы предназначены для последовательного управления одной из двух взаимно перпендикулярных координат. Такие системы применяются для управления обработкой на токарных станках деталей типа ступенчатых валиков, а на фрезерных станках — для управления обработкой деталей с прямоугольным контуром,
В контурных СЧПУ осуществляется одновременное взаимосвязанное управление по нескольким координатам, в результате чего получается деталь со сложным профилем. Такие системы применяются для управления токарными, фрезерными, электроэрозионными станками, а также сварочными машинами.
Универсальные (позиционно-контурные) системы управления применяются в многооперационных станках, использующихся для обработки одновременно несколькими инструментами сложных деталей (типа корпус).
По характеру движения привода и в зависимости от числа одновременно управляемых координат СЧПУ делятся на системы управления по одной, двум, трем, четырем, пяти координатам и более.
По виду приводов и в зависимости от вида энергии, использующейся в двигателях устройств привода СЧПУ, они делятся на СЧПУ с электроприводом, электрогидравлическим приводом, электропневматическим приводом.
Различают следящие приводы, построенные по принципу замкнутых систем автоматического управления — следящих систем; приводы разомкнутого типа, которые могут быть построены только на базе шаговых двигателей, допускающих непосредственное программное управление значением перемещения и его скоростью.
По способу задания программы выделяют СЧПУ, в которые программа вводится с перфоленты, с магнитной ленты, с клавиатуры, из памяти центральной ЭВМ. Существует также способ записи программы при обработке первой детали и способ речевого управления станком с ЧПУ.
В настоящее время устройства ЧПУ строятся по структуре ЭВМ, чаще на базе серийных микроЭВМ (например, «Электроника-60»), т. е. блоки СЧПУ имеют универсальный характер, и связи между ними могут изменяться по программе.
Операции управления выполняются последовательно через центральный процессор. В составе блоков имеются оперативное (ОЗУ) и постоянное (ПЗУ) запоминающие устройства. Для такого рода устройств требуется специальное математическое (программное) обеспечение. Математическое обеспечение может храниться в ПЗУ, если не требуется частая смена алгоритма работы оборудования, или может вводиться через устройство ввода как часть управляющей программы. Такое построение устройства ЧПУ позволяет легко корректировать алгоритм работы, совершенствовать его по мере накопления статистической информации о качестве изготовленных деталей.
При создании автоматических линий, участков станков с ЧПУ и т. д. широко применяются промышленные роботы. В машиностроении промышленные роботы заменяют рабочих, занятых обслуживанием металлорежущих станков, прессов, печей и другого технологического оборудования, они выполняют такие основные технологические операции, как сварка, простейшая сборка, транспортировка и т. п.
Использование промышленных роботов позволяет комплексно автоматизировать работу отдельных станков, но и перейти к автоматизации отдельных участков механической обработки, штамповки, точечной сварки путем создания робототехнических комплексов. Такие комплексы являются обязательной составной частью гибких автоматизированных производств (ГАП).
Основная задача, выполняемая промышленными роботами, — манипуляционные действия в производственном процессе. Манипуляционные действия — это перемещение в пространстве и ориентирование предметов труда (заготовок, готовых деталей) и орудий труда (инструментов).
Наиболее простые роботы, основная задача которых — выполнение определенных движений (манипуляций), заданных программой, называются автоматическими манипуляторами. В зависимости от сложности выполняемой работы автоматические роботы-манипуляторы делятся на три вида — три поколения.
Роботы-манипуляторы первого поколения работают по жесткой программе, а их взаимодействие с окружающей средой ограничено элементарными обратными связями. Роботы первого поколения могут оснащаться датчиками (в частности, датчиками осязания— тактильными, позволяющими регулировать силу сжатия захвата). Для роботов первого поколения необходимо, чтобы среда, в которой они действуют, была определенным образом организована. Это значит, что все предметы (заготовки и готовые детали, инструмент, элементы конструкции станков и оборудования и т. д.) должны находиться в определенных местах и иметь определенную ориентацию в пространстве. Это требование накладывает некоторые ограничения на применение роботов-манипуляторов первого поколения.
Роботы-манипуляторы второго поколения обладают элементами адаптации и способны решать более сложные задачи. Эти роботы имеют датчики, позволяющие им координировать движения с восприятием сигналов о состоянии окружающей среды. В частности, роботы второго поколения могут иметь тактильные датчики, позволяющие управлять развиваемым усилием, локационные датчики (световые, ультразвуковые, телевизионные, гамма-лучевые и т. п.), позволяющие изменять траекторию движения манипулятора при появлении препятствия, при совмещении деталей, нечетко ориентированных в пространстве, и т. п.
Роботы-манипуляторы третьего поколения обладают способностью вести логическую обработку поступающей к ним информации. Эти роботы способны к обучению и адаптации, могут вести диалог с человеком-оператором, распознавать и анализировать сложные ситуации, формировать понятия и создазать модель окружающей среды, планировать поведение в виде программы действий (с учетом предыдущего опыта) и т. д. Осуществление работы по такому сложному алгоритму возможно только с применением ЭВМ.
Основную часть парка работающих в промышленности роботов-манипуляторов составляют роботы первого поколения, как наиболее простые, надежные и экономичные.
Нынешний уровень состояния техники характеризуется быстрым развитием средств числового программного управления, станками и роботами на базе микропроцессорной техники и БИС. Некоторые современные СЧПУ токарных станков позволяют автоматически рассчитывать число повторений и траекторию каждого прохода для получения окончательной конфигурации детали по заданным оператором контуре готовой детали, глубине резания на один проход и скорости резания.
Получают распространение участки станков с ЧПУ, управляемых непосредственно из памяти центральной ЭВМ по хранящейся в ней на магнитных дисках программах. При этом центральная ЭВМ обеспечивает путем рациональной диспетчеризации высокую загрузку станков с ЧПУ, вырабатывает и передает административную и техническую информацию, определяет последовательность операций и взаимодействие станков, управляет транспортировкой заготовок и готовой продукции.
В США распространены системы ЧПУ с ручным вводом программы — системы цехового программирования. Такие устройства строятся обычно на основе микропроцессоров, больших интегральных схем и позволяют осуществлять контурный и позиционный режимы обработки от программы, вручную вводимой в память устройства с последующей возможностью воспроизводства ее необходимое количество раз. Такие системы находят применение на небольших заводах, где считается экономически нецелесообразным содержать штат технологов-программистов и их функции выполняют высококвалифицированные операторы.
В настоящее время наблюдается быстрое развитие станков с ЧПУ, в которых запись программы производится по первой детали. При обработке первой детали все данные вводятся в память устройства ЧПУ и одновременно набивается перфолента. Способ программирования по первой детали применяется в основном при обработке несложных деталей.
Развивается новое направление — речевое управление станками с ЧПУ. Предполагается применение голосовых команд в сочетании с системой ЧПУ, имеющей запоминающее устройство, для управления лишь отдельными видами оборудования, например, станков для обработки листовых материалов. В будущем предполагается такое управление металлорежущими станками и роботами.
В связи с повышением требований к точностным параметрам деталей ведутся работы по созданию адаптивных систем управления с целью оптимизации процесса обработки и повышения точности обрабатываемых деталей. Такие системы должны обеспечивать измерение поверхности детали и корректировку размеров в ходе обработки, следить за износом инструмента, сигнализировать о вероятности появления брака, обеспечивать мгновенной информацией систему управления станком о поломке инструмента и т. п.
Большие исследовательские работы ведутся в области адаптивно-диагностического управления станками, когда в зависимости от состояния обрабатываемой детали автоматически выбирают оптимальные подачу и скорость резания.
Предполагается, что вскоре будет найдено решение проблемы автоматического восприятия данных о необходимости замены изношенного или поврежденного инструмента.
Дата добавления: 2015-12-08; просмотров: 3330;