Безотказность и ремонтопригодность изделий.
1. Коэффициент готовности Кг. Вероятность того, что изделие будет работоспособно в произвольно выбранный момент времени в промежутках времени между выполнением планового технического обслуживания.
2. Коэффициент оперативной готовности Ког. Вероятность того, что изделие начав в произвольный момент времени выполнение задачи, проработает безотказно в течении требуемого времени.
Ког = Кг ×Р(t).
3. Коэффициент технического использования Кти. Показывает, какую часть от суммарного времени работы и простоя изделия (при технических обслуживаниях и ремонтах) составляет время его работы.
 ,
,
где ∑Тр, ∑Трем, ∑ТТхо – суммарное время работы изделия, ремонтов и
технического обслуживания.
ТРЕТИЙ ВОПРОС
В станках с числовым программным управлением (ЧПУ) проблемы диагностики и контроля решаются с помощью встроенных в устройства внутренних систем контроля и диагностики.
Работа этих устройств осуществляется как во время функционирования станка при обработке детали (Электроника НЦ-31), так и с помощью диагностических тестов (2Р22 и «Контур-1»). Обнаружение неисправности автоматически прекращает обработку детали и на дисплее (2Р22) или табло (Электроника НЦ-31, «Контур-1») индикатируется её код.
Проверка ЧПУ на базе микроЭВМ (Электроника НЦ-31) осуществляется программой – резидентный проверяющий тест (РПТ) и программой анализа ошибок ввода и работы устройства, размещенной в ПЗУ микроЭВМ.
В математическом обеспечении ЧПУ «2Р22» заложена возможность проверки его работоспособности в режиме работы «ТЕСТ» с помощью тестов записанных на магнитной ленте и хранящимися на кассетах типа МК-60.
На примере систем ЧПУ, которые изучаются в колледже можно сделать вывод о том, что средства контроля и диагностики могут быть реализованы как аппаратно, так и программно.
Основная функция систем контроля и диагностики информационно-управляющих вычислительных систем – установления факта отказа элемента, узла, устройства сменного блока, входящего в систему.
В зависимости от характера использования информационно-управляющих вычислительных систем допускают два подхода в организации систем контроля:
- в виде системы встроенного контроля конструктивно объединенной с устройством;
- в виде контрольно-проверочной аппаратуры.
Реализацию первого подхода мы кратко рассмотрели.
При втором подходе, для реализации функций контроля при эксплуатации и ремонте устройств ЧПУ используют следующие устройства: проверочные стенды, установку УТК-2М (автоматизированный тестовый контроль и диагностика), логический зонд ЗЛ-01, испытатель цифровых интегральных микросхем (ИЦИС) и генератор ИЦИС, логические анализаторы, генераторы слов, комплекты диагностирования (Электроника НЦ-603), сигнатурные анализаторы, электронные и цифровые приборы (тестеры, частотомеры, осциллографы и т.п.).
Литература:
1. В.В. Стрыгин «Основы вычислительной, микропроцессорной техники и программирования» стр: 105-108.
2. Б.Я. Лихтциндер «Микропроцессоры и вычислительные устройства в радиотехнике» стр: 43-44.
ТЕМА 1.2 Архитектура микропроцессоров.
ЗАНЯТИЕ 1.2.1 История развития микропроцессорной техники. Преимущества
и недостатки микропроцессорной техники. Терминология.
Классификация.
ВОПРОСЫ ЗАНЯТИЯ:
1. История развития микропроцессорной техники.
2. Преимущества и недостатки микропроцессорной техники. Терминология.
3. Классификация микропроцессоров (МП).
ПЕРВЫЙ ВОПРОС
Создание микропроцессоров открыло новую эру в вычислительной технике и привело к бурному развитию средств обработки информации. Первый микропроцессор был создан в 1971 г. М. Хоффом (микропроцессор I-4004), сотрудником американской фирмы Интел. Вместо того чтобы создавать набор интегральных микросхем, каждая из которых выполняла бы одну сложную функцию, М. Хофф предложил реализовать универсальную ЭВМ в виде одной сложной логической схемы в интегральном исполнении.
Выпуск первых микропроцессоров позволил существенно изменить технологию проектирования и производства средств вычислительной техники. Теперь уже нет необходимости для каждого нового изделия разрабатывать интегральную микросхему. Вместо этого разрабатывается программа для выполнения требуемой функции. Первые микропроцессоры создавались для работы с 4-разрядными двоичными числами. С ростом степени интеграции стали выпускаться 8-, 16-разрядные и в настоящее время 32-разрядные МП. С ростом разрядности увеличивается емкость адресуемой памяти в подключаемом к МП запоминающем устройстве. По своим возможностям современный МП приближается к процессорам средних ЭВМ и мини-ЭВМ.
Создание микропроцессора (МП) явилось следствием развития и совершенствования технологии производства интегральных схем. Повышение степени интеграции микросхем привело к закономерному этапу в развитии вычислительной техники — реализации архитектуры ЭВМ на одной интегральной схеме.
Способность к программированию последовательности выполняемых функций, т. е. способность работать по заданной программе, является основным отличием МП от элементов «жесткой» логики (интегральных схем малой и средней степени интеграции). Кроме физической структуры микропроцессора, называемой аппаратными средствами, на выполняемый им алгоритм влияют программные средства, т. е. последовательность команд и данных, записанных в запоминающем устройстве.
В общем виде аппаратные средства микропроцессора повторяют структуру процессора ЭВМ и включают: арифметическо-логическое устройство, устройство управления и несколько рабочих регистров. Микропроцессор может состоять из одной или нескольких интегральных схем, распределенных по принципу выполняемых функций.
Таким образом, микропроцессор — это программно-управляемое устройство, осуществляющее процесс обработки информации, управления им, построенное на одной или нескольких больших интегральных схемах (БИС).
Совершенствование технологии производства интегральных схем привело к тому, что за сравнительно небольшое время появилось четыре поколения микропроцессоров, отличающихся своими техническими характеристиками:
Первое – медленно действующие (время выполнения команды 10.. 20 мкс) четырехразрядные МП, имеющие относительно ограниченный набор команд, объем памяти и видов адресации;
Второе –четырех- и восьмиразрядные МП с временем выполнения команд 2...5 мкс, расширенным набором команд, объемом памяти и различными видами адресации Эти МП проще в использовании, так как выпускаются комплектами совместимых и взаимно дополняющих друг друга БИС;
Третье –быстродействующие (время выполнения команды 100…300 нс) секционированные МП, выполняемые с использованием биполярной технологии и микропрограммным принципом управления, а также 16-разрядные процессоры и спецпроцессоры;
Четвертое– однокристальные микроЭВМ с встроенными портами ввода-вывода и запоминающими устройствами, 32-разрядные микропроцессоры.
В настоящее время микропроцессоры и изготовленные на их базе микроЭВМ присутствуют практически во всех областях деятельности человека.
ВТОРОЙ ВОПРОС
Основные причины широкого внедрения микропроцессорной техники:
- использование в микропроцессорных системах цифрового способа представления информации, позволяющего значительно повысить помехоустойчивость создаваемых на их базе устройств, обеспечить простоту передачи и преобразования информации без потерь и долговременное ее хранение;
- применение программного способа обработки информации, позволяющего создавать в значительной степени, унифицированные технические средства, отличающиеся практически лишь содержимым запоминающего устройства и специфическими устройствами ввода — вывода информации;
- компактность, высокая надежность и низкая потребляемая мощность микропроцессорных средств, обеспечивающие возможность расположения управляющих устройств, созданных на их основе, в непосредственной близости от управляемого оборудования;
- относительно низкая стоимость микропроцессорных средств и высокая степень их эффективности.
Эти факторы позволили МП в короткое время занять ведущее место в совершенствовании целых отраслей промышленности, создании гибких автоматизированных производств, информационных сетей, автоматизированных систем управления технологическими процессами, систем автоматического проектирования и т. п.
Микропроцессор решает задачи методами последовательных вычислений, что приводит к большим затратам времени. Поэтому быстродействие любых микропроцессорных систем меньше, чем электронных систем на основе схем с произвольными связями, выполненных на основе тех же схемотехнологических принципов. С учетом этого очень важного для практической работы фактора можно отметить следующие преимущества микропроцессорных систем перед электронными системами на основе ИС с произвольными связями:
1) меньше корпусов ИС и БИС, более простые печатные платы, меньшее их число и меньшее число разъемов для реализации одних и тех же функций;
2) более высокая надежность вследствие меньшего числа контактов, связей и компонентов;
3) меньшая мощность потребления и снижение требований к источникам питания;
4) более простые сборка и испытание системы; легкость изменения и наращивания функций изменением программного обеспечения;
5) возможность выпуска все более усложняющихся систем (непрерывная эволюция) при использовании конструктивного и программного задела.
Микропроцессор — центральная часть любой электронной системы управления и обработки данных, но не сама система. Отдельный микропроцессор не может выполнить каких-либо полезных функций во всех сферах, где его применение имеет какой-либо технико-экономический смысл. Это обстоятельство определяется тем, что для получения реальной пользы от функционирования микропроцессора в него необходимо вводить исходные данные о текущем состоянии какого-либо управляемого объекта (процесса) и использовать выводимые данные, полученные в результате обработки исходных данных по заранее отработанному алгоритму, для задания определенных управляющих воздействий на некоторую совокупность управляющих органов (исполнительных механизмов). Следовательно, электронная система с микропроцессором (или на основе микропроцессора) обязательно должна содержать следующие функциональные части — подсистемы: ввода — вывода данных, обработки данных, накопления и хранения данных об особенностях внутренней структуры и функционировании объекта или процесса (памяти системы).
Для размещения всех аппаратурных средств электронной системы необходимо иметь конструктив, определяемый особенностями управляемого объекта (процесса), со средствами электрического, электронного и механического сопряжения частей системы и управляемого объекта (процесса).
Объект управления и электронная система управления на основе микропроцессора могут иметь общий или раздельные источники питания, но в любом случае должны быть решены все аспекты проблемы электромагнитной совместимости.
Создание микропроцессорного комплекта МПК БИС привело к появлению принципиально новых направлений в применении цифровой вычислительной техники и позволило осуществить встроенное управление простым оборудованием и приборами, распределенное управление сложным оборудованием и агрегатами, распределенные вычисления в многопроцессорных системах.
Использование микропроцессоров и микро-ЭВМ дает возможность получить существенный технико-экономический эффект, но требует значительных трудовых и денежных затрат.
Оборудование, в которое встраивается микропроцессор, должно быть оснащено датчиками, определяющими режимы работы его отдельных частей или технологического процесса, а также исполнительными механизмами, позволяющими влиять на протекающий процесс. Информация от датчиков и сигналы воздействия на исполнительные механизмы почти всегда имеют параметры сигналов, отличающиеся от принятых в микропроцессоре.
Устройства согласования сложно изготовлять в виде интегральных схем, поскольку в них происходит усиление очень малых сигналов, преобразование аналоговых сигналов в дискретные и, наоборот, световых, магнитных и других в электрические и т. д. Естественным выходом из этого положения является миниатюризация всех компонентов управляющих систем, которая приводит к необходимости создания не только самого МП, но и семейства интегральных схем, совместимых электрически и конструктивно между собой, а также с семействами датчиков и исполнительных механизмов.
Комплексный подход к созданию и применению микропроцессорных информационно-управляющих систем гарантирует полную и эффективную реализацию тех преимуществ, которые потенциально предполагает использование микропроцессоров для решения важных задач.
Микропроцессорная техника имеет свою специфическую терминологию. Ниже приведены рекомендованные Международным центром научной и технической информации и Международным научно-исследовательским институтом проблем управления термины и определения, используемые при изучении курса дискретной автоматики.
Основные термины и определения:
адрес – указание местоположения объекта в памяти ЭВМ;
алгоритм - набор предписаний, однозначно определяющих содержание и последовательность выполнения операций для систематического решения определенной задачи;
аналого-цифровой преобразователь (АЦП) — устройство, преобразующее непрерывный (аналоговый) сигнал в дискретные цифровые величины;
арифметическо-логическое устройство (АЛУ) — функциональная часть процессора, выполняющая арифметические и логические действия над данными;
Ассемблер — системная обслуживающая программа, преобразующая символические инструкции в команды машинного языка и позволяющая производить диагностику, формирование ссылок для редактора связей и т. д.;
байт — обрабатываемый как единое целое элемент данных, состоящий из последовательности двоичных разрядов; в микро-ЭВМ обычно используется восьмибитовый байт;
БЕЙСИК — популярный алгоритмический язык программирования высокого уровня, первоначально созданный для целей обучения программированию. Язык имеет относительно простой синтаксис, что облегчает его быстрое освоение;
бит— одиндвоичный разряд машинного слова или единица информации, принимающая значения 0 или 1;
бод — единица скорости передачи информации последовательным двоичным кодом (бит в секунду);
буфер — запоминающее устройство для временного хранения дачных с целью согласования асинхронно работающих устройств, либо область ОЗУ, временно резервируемая для выполнения процедуры ввода—вывода;
видеотерминал — устройство, обеспечивающее возможность обмена данными по каналу связи с удаленной ЭВМ. Включает клавиатуру для ввода и дисплей для вывода информации;
встраиваемая микроЭВМ — микроЭВМ, конструктивно приспособленная для работы в составе приборов и оборудования;
графопостроитель — устройство вывода, предназначенное для представления данных в виде графического изображения на бумаге;
диалоговый режим — режим взаимодействия пользователя с ЭВМ, при котором каждый запрос пользователя вызывает немедленное ответное действие ЭВМ;
дисплей — устройство, обеспечивающее визуальное представление цифровой, алфавитно-цифровой и (или) графической информации на экране электронно-лучевой трубки, в плазменных панелях, на жидких кристаллах, светодиодах и т. п. в форме, удобной для оператора;
длина слова — количество битов в одном машинном слове;
доступ (обращение) — процедура установления связи с ЗУ для выборки/записи данных;
емкость памяти — наибольший объем данных, выраженный в единицах информации, который может одновременно храниться в ЗУ;
загрузчик — обслуживающая программа для загрузки объектной программы в ОЗУ;
запоминающее устройство (ЗУ) — изделие, реализующее функциональную часть ЭВМ, которая предназначена для запоминания и (или) выдачи информации;
интерпретатор — обслуживающая программа, осуществляющая пооператорную трансляцию и выполнение исходной программы;
интерфейс — совокупность унифицированных технических и программных средств, необходимых для подключения данных устройств к системе или одной системы к другой;
канал передачи данных — совокупность технических средств, обеспечивающих передачу информации, и устройств преобразования сигналов;
команда — предписание, определяющее шаг процесса выполнения программы. Содержит указание операции, адрес операндов и другие служебные признаки;
компилятор — обслуживающая программа, выполняющая трансляцию на машинный язык программы, записанной на исходном языке программирования;
контроллер — устройство, выполняющее функции управления, передачи данных и освобождающее от этих функций процессор;
контроль четности — метод контроля данных, при котором сумма по модулю 2 двоичных единиц в машинном слове, включая контрольный разряд, должна иметь определенную четность, т. е. быть всегда четной или нечетной;
косвенная адресация — система адресации, при которой адресная часть инструкции содержит адрес ячейки памяти, содержащей прямой адрес или другой косвенный адрес;
магистраль — совокупность шин, связывающих собой все устройства микропроцессорной системы;
маркер (курсор) — специальный знак на экране дисплея для указания определенных позиций или элементов;
машинное слово — последовательность битов или знаков, трактуется в процессе обмена или обработки как единый элемент данных;
машинный код — двоичный код, в котором по специфическим для данной ЭВМ правилам кодируется ее система команд;
микропроцессор (МП) — программно-управляемое устройство, осуществляющее процесс обработки цифровой информации и управления им, построенное, как правило, на одной или нескольких больших интегральных схемах;
микропроцессорный комплект — совокупность микропроцессорных и других интегральных микросхем, совместимых по конструктивно-технологическому исполнению п предназначенных для совместного применения;
микроЭВМ — ЭВМ, состоящая из микропроцессора, полупроводниковой памяти, средств связи с периферийными устройствами и при необходимости пульта управления и источника питания, объединенных общей конструкцией;
модем — модулятор и демодулятор, объединенные в одном устройстве и осуществляющие преобразование сигналов для передачи их по линии связи;
монитор — записанная в ПЗУ системная программа, реализующая операции обмена с внешними устройствами и помогающая осуществить отладку программ;
накопитель на гибком магнитном диске — внешнее ЗУ, в котором носителями информации являются сменные гибкие магнитные диски;
однокристальная ЭВМ — микроЭВМ, построенная в виде одной большой или сверхбольшой интегральной схемы;
операнд — элемент данных, над которым выполняется операция;
оперативное запоминающее устройство (ОЗУ) — ЗУ с прямой адресацией, отличающееся быстротой доступа;
оператор — допустимая в языке программирования синтаксическая конструкция, отражающая определенное действие в программе (присвоение значения, передачу управления и т. д.);
операционная система — комплекс взаимосвязанных управляющих и обслуживающих программ, обеспечивающих автоматическое управление вычислительными процессами и ресурсами ЭВМ при решении задач;
параллельный порт — порт ввода—вывода, через который данные передаются и принимаются параллельно, т. е. одновременно все разряды, относящиеся к данному символу или блоку данных;
подпрограмма — часть программы, допускающая многократнoe обращение к ней из различных точек программы;
пользователь—лицо, использующее данное вычислительное устройство для выполнения необходимых ему работ;
порт ввода-вывода — средство для подключения периферийных устройств к ЭВМ;
последовательный порт — порт ввода-вывода, через который данные передаются и принимаются последовательно разряд за разрядом;
постоянное запоминающее устройство (ПЗУ)—ЗУ с неизменяемым содержанием памяти;
прерывание — временное прекращение выполнения текущей программы и переход к выполнению программы обслуживания устройства, вызвавшего прерывание;
программа — последовательность инструкций, реализующих алгоритм. Программы обычно могут быть написаны: а) в двоичном или шестнадцатеричном (машинном) коде, который непосредственно воспринимается процессором; б) на языке типа Ассемблер; в) на языке высокого уровня;
программа на исходном языке — программа, представленная в системе в исходном виде, т. е. написанная на одном из языков программирования. Требует для своего выполнения предварительного преобразования, например трансляции;
программатор — специальное устройство для записи подготовленных пользователем программ в ППЗУ или РПЗУ;
программируемое постоянное запоминающее устройство (ППЗУ)—ПЗУ в которое информация заносится однократно пользователем и после этого не меняется;
программная совместимость — возможность выполнения одних и тех же программ на ЭВМ различных типов с получением идентичных результатов;
программное обеспечение — совокупность программ, обеспечивающих реализацию функций микроЭВМ, микропроцессорного устройства или системы;
прямая адресация — система адресации, при которой адресная часть инструкции содержит адрес, определяющий непосредственно ячейку памяти или место на носителе, содержащее требуемый операнд;
прямой доступ в память — метод, позволяющий с большой скоростью осуществлять загрузку данных с периферийного устройства прямо в оперативное ЗУ;
регистр — функциональный блок для хранения машинного слова или его части;
редактор — обслуживающая программа для редактирования, набора данных с целью представления их в виде, воспринимаемом средствами обработки, либо представления в соответствующем формате вывода;
режим работы в реальном масштабе времени — режим работы системы, обеспечивающий прием к обработке данных по мере их поступления без каких-либо ограничений и выдачу результатов в требуемые интервалы времени;
репрограммируемое постоянное запоминающее устройство (РПЗУ) —ЗУ, в которое информация, подлежащая хранению, заносится многократно, но при этом время записи значительно превышает время выборки;
секционный микропроцессор — микропроцессор, полученный на основе соединения однотипных 2-, 4-, 8- или 16-разрядных микропроцессорных интегральных схем, каждая из которых имеет в своем составе АЛУ и несколько общих регистров. Параллельное соединение этих микросхем позволяет построить микроЭВМ с любой желаемой длиной машинного слова;
сеть микроЭВМ — система соединенных между собой и обменивающихся информацией микроЭВМ;
символ — отдельный знак из заданного набора условных обозначений, используемых для представления данных в ЭВМ;
система команд — полный набор всех инструкций, допустимых в машинном языке данной ЭВМ;
стек — память магазинного типа;
счетчик команд — регистр, на основе содержимого которого вырабатывается адрес следующей команды;
техническое обеспечение — совокупность технических компонентов микроЭВМ, микропроцессорного устройства или системы;
указатель стека — регистр, определяющий адрес верхней ячейки используемого стека;
устройство ввода-вывода — устройство, обеспечивающее обмен данными между оперативной памятью ЭВМ и периферийными устройствами;
файл — последовательность записей, размещаемая на внешних ЗУ и рассматриваемая в процессе пересылки и обработки как единое целое;
центральный процессор — процессорная БИС, непосредственно осуществляющая процесс обработки данных;
цифроаналоговый преобразователь (ЦАП) — устройство, преобразующее дискретный цифровой сигнал в непрерывный аналоговый сигнал;
шина — группа линий передачи информации, объединенных общим функциональным признаком (например, шина данных, адресов, управления);
эмуляция — имитация функционирования одной системы средствами другой системы без потери функциональных возможностей или искажения получаемых результатов;
язык Ассемблер — символический язык программирования, структура операторов которого определяется форматами команд и данными машинного языка;
язык высокого уровня — язык программирования, средства которого допускают описание проблемы в наглядном, легко воспринимаемом виде.
ТРЕТИЙ ВОПРОС
Микропроцессоры обладают следующими характеристиками: разрядность адреса и данных, тип корпуса, количество источников питания, мощность рассеяния, температурный диапазон, возможность расширения разрядности, время цикла выполнения команд (микрокоманд), уровни сигналов, помехоустойчивость, нагрузочная способность, объединение сигналов на выходах, надежность и т. д.
По числу БИС в микропроцессорном комплекте (МПК) различают однокристальные, многокристальные, многокристальные секционные микропроцессоры.
Однокристальные микропроцессоры получаются при реализации всех аппаратных средств процессора в виде одной БИС. По мере увеличения степени интеграции элементов в кристалле и числа выводов корпуса параметры однокристальных микропроцессоров улучшаются. Однако возможности однокристальных микропроцессоров ограничены аппаратурными ресурсами кристалла и корпуса. Поэтому более распространены многокристальные и многокристальные секционные микропроцессоры.
Многокристальные микропроцессоры получаются при разбиении его логической структуры на функционально законченные части, которые реализуют в виде БИС. Функциональная законченность БИС многокристального микропроцессора означает, что его части выполняют заранее определенные функции и могут работать автономно, а для построения развитого процессора не требуется организации большого количества новых связей и каких-либо других интегральных схем (ИС) или БИС.
Один из возможных вариантов разбиения структуры процессора – это создание трехкристального микропроцессора, содержащего БИС операционного процессора, управляющего процессора и интерфейсного процессора. Операционный процессор (ОП) служит для обработки данных, управляющий процессор (УП) выполняет функции выборки, декодирования и вычисления адресов операндов и также генерирует последовательности микрокоманд. Автономность работы и большое быстродействие БИС позволяют выбирать команды из памяти с большей скоростью, чем БИС ОП. При этом в УП образуется очередь еще не исполненных команд, заранее подготавливаются те данные, которые потребуются ОП в следующих циклах работы. Такая опережающая выборка команд экономит время ОП на ожидание операндов, необходимых для выполнения команд программ. Интерфейсный процессор (ИП) позволяет подключить память и периферийные средства к микропроцессору. Большая интегральная схема ИП выполняет также функции канала прямого доступа к памяти. Выбираемые из памяти команды распознаются v выполняются каждой частью микропроцессора автономно, и поэтому может быть обеспечен режим одновременной работы всех БИС МП, т. е. конвейерный поточный режим исполнения последовательности команд программы (выполнение последовательности с небольшим временным сдвигом). Такой режим работы значительно повышает производительность микропроцессора.
Многокристальные секционные микропроцессоры получаются в том случае, когда в виде БИС реализуются части (секции) логической структуры процессора. Микропроцессорная секция — это БИС, предназначенная для обработки нескольких разрядов данных или выполнения определенных управляющих операций. Секционность БИС МП определяет возможность «наращивания» разрядности обрабатываемых данных или усложнения устройств управления микропроцессором при «параллельном» включении большего числа БИС. Многокристальные секционные микропроцессоры имеют разрядность от 2—4 до 8—16 бит и позволяют создавать высокопроизводительные процессоры ЭВМ.
По назначению различают универсальные и специализированные микропроцессоры.
Универсальные микропроцессоры можно применять для решения разнообразных задач. Их эффективная производительность мало зависит от проблемной специфики решаемых задач.
Специализация МП, т. е. его проблемная ориентация на ускоренное выполнение определенных функций, позволяет резко увеличить эффективную производительность при решении только определенных задач. Среди специализированных микропроцессоров можно выделить: микроконтроллеры, ориентированные на выполнение сложных последовательностей логических операций; математические МП, предназначенные для повышения производительности при выполнении арифметических операций за счет, например, матричных методов их выполнения; МП для обработки данных в различных областях применения и т.д. С помощью специализированных МП можно эффективно решать сложные задачи параллельной обработки данных.
По виду обрабатываемых входных сигналов различают цифровые и аналоговые микропроцессоры.
Сами микропроцессоры — это цифровые устройства, однако могут иметь встроенные аналого-цифровые и цифро-аналоговые преобразователи. Поэтому входные аналоговые сигналы передаются в МП через преобразователь в цифровой форме, обрабатываются и после обратного преобразования в аналоговую форму поступают на выход. С точки зрения архитектуры такие микропроцессоры представляют собой аналоговые функциональные преобразователи сигналов и называются аналоговыми микропроцессорами. Они могут выполнять функции любой аналоговой схемы. Применение аналогового микропроцессора значительно повышает точность обработки аналоговых сигналов и их воспроизводимость, расширяет функциональные возможности за счет программной «настройки» цифровой части микропроцессора на различные алгоритмы обработки сигналов.
Обычно в состав однокристальных аналоговых МП входят несколько каналов аналого-цифрового и цифроаналогового преобразования. В аналоговом микропроцессоре разрядность обрабатываемых данных достигает 24 бит и более, большое значение уделяется увеличению скорости выполнения арифметических операций.
По характеру временной организации работы различают синхронные и асинхронные микропроцессоры.
Синхронные микропроцессоры— это микропроцессоры, в которых начало и конец выполнения операций задаются устройством управления (время выполнения операций в этом случае не зависит от вида выполняемых команд и величин операндов).
Асинхронные микропроцессоры позволяют начало каждой следующей операции определить по сигналу фактического окончания выполнения предыдущей операции. Для более эффективного использования каждого устройства микропроцессорной системы в состав асинхронно работающих устройств вводят электронные цепи, обеспечивающие автономное функционирование устройств.
Закончив работу над какой-либо операцией, устройство вырабатывает сигнал запроса, означающий его готовность к выполнению следующей операции. При этом функции естественного распределителя работ принимает на себя память, которая в соответствии с заранее установленным приоритетом выполняет запросы остальных устройств по обеспечению их командной информацией и данными.
По количеству выполняемых программ различают одно- и многопрограммные микропроцессоры.
В однопрограммных микропроцессорах выполняется только одна программа. Переход к выполнению другой программы происходит после завершения текущей программы.
В много- или мультипрограммных .микропроцессорах одновременно выполняются несколько (обычно несколько десятков) программ. Организация мультипрограммной работы микропроцессорных управляющих систем позволяет осуществлять контроль за состоянием и управлять большим числом источников или приемников информации.
Литература:
1. М.В. Напрасник «Микропроцессоры и микроЭВМ», стр: 4-10, 21-25.
ЗАНЯТИЕ 1.2.2 Микропроцессор как средство программного управления.
Общие принципы обработки и представления информации в
МП. Типовая структура обрабатывающей части МП (АЛУ,
РОН, буферные регистры). Взаимодействие узлов МП.
Вспомогательные элементы МП.
ВОПРОСЫ ЗАНЯТИЯ:
1. Микропроцессор как средство программного управления. Общие принципы обработки и представления информации в МП.
2. Типовая структура обрабатывающей части МП (АЛЛУ, РОН, буферные регистры).
3. Взаимодействие узлов МП. Вспомогательные элементы МП.
ПЕРВЫЙ ВОПРОС
Наметившийся в последние годы прогресс в области микроэлектроники изменил подход к проектированию средств вычислительной техники. На смену компонентам малой и средней степеней интеграции приходят БИС, содержащие по несколько десятков тысяч транзисторов на одном кристалле.
Однако современная технология производства БИС, обеспечивающая очень высокую плотность размещения транзисторов, не обеспечивает столь же высокой плотности выполнения электрических соединений. Чем ниже степень регулярности соединений, тем менее технологичен компонент и тем ниже предельно допустимый уровень его интеграции. Компоненты с «жесткой» реализацией логических функций, обычно характеризуемые сложность и разнородностью внутренних соединений при малом числе транзисторов, не полностью позволяют использовать возможности современной технологии БИС.
В отличие от них элементы программируемой логики, например ЗУ, имеют регулярную структуру межсоединений и наиболее приспособлены к реализации с использованием современных технологических процессов производства БИС, что послужило одной из наиболее веских причин вытеснения устройств с «жесткой» логикой устройствами с программной реализацией, содержащими элементы памяти.
Другая причина преимущественного использования программируемых устройств заключается в их высокой универсальности, гибкости и простоте настройки на заданный алгоритм функционирования. Чем сложнее становились БИС с «жесткой» логикой, тем уже оказывалась их специализация. Каждая новая реализация устройств конкретного применения требовала разработки специализированных БИС. В то же время объем выпуска компонентов каждого типа оставался небольшим.
Известно, что стоимость компонента данного типа обратно пропорциональна объему его выпуска. Низкая универсальность и, как следствие, малый объем выпуска специализированных БИС с «жесткой» логикой вызывают значительное повышение стоимости изделий с их использованием. Отмеченные обстоятельства привели к появлению нового подхода при проектировании средств вычислительной техники на основе программируемых логических БИС.
Структура подобных БИС стандартна и достаточно универсальна, а требуемые конкретные функциональные особенности достигаются за счет программного управления. Такие универсальные программно-управляемые БИС получили название микропроцессоров (МП).
Микропроцессор — это конструктивно и функционально законченное устройство, выполненное с использованием технологии БИС и обладающее способностью производить обработку цифровых данных согласно программе, хранимой в элементах памяти.
По своим функциональным возможностям МП представляет собой упрощенный вариант процессорного устройства универсальной ЭВМ. В его состав обычно входят арифметико-логическое устройство (АЛУ), а также устройство управления (УУ), регистровые устройства (РУ) и интерфейсные устройства (ИУ). Таким образом, МП — это лишь часть вычислительного устройства, для нормальной организации которого требуются память и устройства ввода — вывода информации.
В табл. 1 приведены выпускаемые отечественной промышленностью микропроцессорные комплекты БИС (МПК БИС). Практически МП используется вместе с другими интегральными схемами (ИС), поэтому в таблице указаны число ИС в базовом комплекте (собственно микропроцессор) и общее количество сопрягаемых ИС в комплекте. Однокристальные МП изготовляются преимущественно на основе р-МДП и n-МДП технологии униполярных полупроводниковых приборов, а секционные многокристальные МП — на основе ТТЛДШ, И2Л, ЭСЛ быстродействующих биполярных полупроводниковых приборов.
Таблица .I
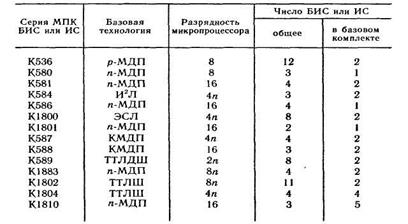
Примечание, n — 1, 2, 4.....
Низкое потребление электрической энергии достигается в МП, выполненных на основе КМОП микроэлектронной технологии.
Высокоскоростные секционные биполярные ИС, имеющие малую физическую разрядность и монтируемые в корпусе с большим числом выводов, позволяют организовать разветвленные связи в процессоре и за счет конвейерной обработки получить высокую производительность.
Разработчикам системы на основе микропроцессора недоступен уровень отдельных транзисторов, связей между ними, а также широкая возможность трансформации связей между компонентами микропроцессорного комплекта БИС. Потребитель воспринимает микропроцессор как нечто цельное, имеющее внешние потребительские свойства, заложенные в его архитектуре.
Архитектура микропроцессора — функциональные возможности аппаратурных электронных средств микропроцессора, используемые для представления данных, и машинных операций, описания алгоритмов и процессов
вычислений.
Архитектура объединяет аппаратурные, микропрограммные и программные средства вычислительной техники и позволяет четко выделить то, что при создании конкретной микропроцессорной системы и использовании возможностей микропроцессорного комплекта БИС должно быть реализовано пользователем программным способом и дополнительными аппаратурными средствами.
Принципы управления. Микропроцессор можно представить в виде некоторого последовательностного цифрового устройства (ПЦУ), состоящего из двух частей: операционной и управляющей (рис. 1).
Процесс функционирования операционного ПЦУ состоит из последовательности элементарных действий в его узлах. Элементарными действиями являются: установка регистра в некоторое состояние, инвертирование содержимого разрядов регистра, передача информации от одного узла к другому (например, передача содержимого из регистра в регистр), сдвиг информации в узле влево или вправо, логические поразрядные операции, проверка условий и т. д. Эти действия производятся под воздействием сигналов управляющего ПЦУ. Такие элементарные акты преобразования информации выполняются в течение одного такта сигналов синхронизации и называются микрооперациями. В течение одного такта сигналов синхронизации могут выполняться несколько микроопераций. Совокупности одновременно выполняемых микроопераций в течение одного такта ставится в соответствие понятие микрокоманды, а весь набор различных микрокоманд называют микропрограммой. Поскольку управляющее ПЦУ определяет микропрограмму (последовательность выполнения микроопераций), оно получило название микропрограммного автомата.
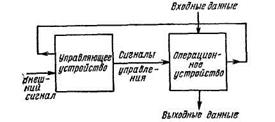
Рис. 1
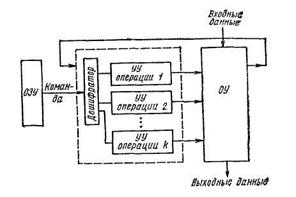
Рис. 2
Формирование управляющих сигналов для выполнения некоторых микрокоманд может потребовать учета состояния узлов операционного ПЦУ или внешних сигналов. Для построения микропрограммного автомата (управляющего ПЦУ) используются принципы схемной и программируемой логики. В первом случае каждой операции соответствует свой набор логических схем, вырабатывающих определенные управляющие сигналы для выполнения микроопераций в определенные моменты времени. При таком способе построения управляющего ПЦУ микрооперации реализуются за счет однажды соединенных между собой логических схем, поэтому такие микропроцессоры называются МП с жесткой логикой управления. Это означает, что для МП фиксируются набор команд по числу операций и структура связей между узлами, обеспечивающих заданную последовательность выполнения каждой операции (рис. 2). В управляющем устройстве (УУ) предусматриваются ряд узлов для выполнения различных операций на одном и том же оборудовании операционного устройства (ОУ). Каждой выполняемой в МП операции соответствует команда. Команда поступает из ОЗУ, и с помощью дешифратора команд в УУ ее код преобразуется в сигналы, которые включают узлы управления процессом выполнения операции. Реализация принципа схемной логики в МП означает практическую невозможность изменений в системе команд после изготовления МП. Она приводит к узкой специализации БИС, что снижает серийность выпуска и удорожает их производство.
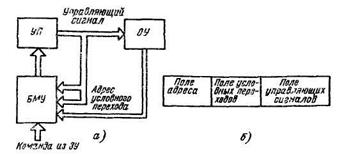
Рис. 3
Вместе с тем МП с жесткой логикой управления обеспечивает наивысшее быстродействие при заданной технологии изготовления.
При реализации принципа программируемой логики (рис. 3, а) кодовые комбинации управляющих сигналов представляются в виде кодов микрокоманд, которые можно хранить в управляющей памяти (УП). При выполнении некоторой операции из УП выбирается микрокоманда и выдается в виде совокупности управляющих сигналов в ОУ. В УП для каждой операции хранится своя микропрограмма. Из оперативной памяти выбирается команда, и с ее помощью определяется соответствующая ей микропрограмма в УП. Микрокоманды найденной микропрограммы последовательно считываются и подаются на ОУ. В результате реализуется операция, определяемая данной командой. Такой способ реализации операций получил название микропрограммного, а МП с устройством управления на этом принципе называется МП с программируемой логикой.
Структура микрокоманды (МК) представлена на рис. 3, б. Микрокоманда содержит поле адреса, поле условных переходов, поле управляющих сигналов. По содержимому поля адреса определяется адрес следующей МК. Для реализации условных переходов в МК предусматривается поле условных переходов, в котором указывается наличие безусловного или условного перехода, а в случае условного перехода отмечаются условия определения адреса очередной МК. Поле управляющих сигналов МК служит для организации функционирования ОУ. В УУ предусматриваются управляющая память (УП) и блок микропрограммного управления (БМУ).
Поступающая из ЗУ команда используется для определения с помощью БМУ адреса первой МК той микропрограммы, которая реализует заданную командой операцию. Адреса последующих МК определяются БМУ следующим образом.
В МК предусматривается поле адреса, которое содержит адрес очередной МК. В случае условного перехода один из разрядов поля условных переходов отводится для указания вида перехода (например 0 — безусловный переход 1 —условный переход). Для каждого условия отводится разряд, определяющий участие данного условия в определении адреса. В зависимости от условия образуются два различающихся младшим разрядом адреса и очередная МК считывается из одной или другой ячейки УП. В результате получается разветвление на два направления. Таким образом, микрокоманда может быть разбита на две. Микрокоманда МУ определяет функционирование БМУ при определении адреса очередной МК по полю адреса и полю условных переходов. Микрокоманда ОУ определяет функционирование ОУ по полю управляющих сигналов.
Использование принципа программируемой логики при построении УУ может привести к снижению быстродействия МП из-за увеличения числа тактовых периодов реализации микропрограммы. Достоинство такой организации управления заключается в возможности гибкого изменения набора команд в МП с помощью изменения совокупности микропрограмм, реализующих эти команды.
Организация прерывания работы МП. Реализация механизма прерываний по сигналам запросов внешних устройств имеет наибольшую важность при обмене данными МП с большим числом асинхронно работающих внешних устройств.
Практически все МП имеют отдельные выводы для ввода и вывода сигналов при определении запросов и удовлетворения запросов на прерывание. Сигналы запроса прерываний текущей программы поступают в произвольный момент времени. Поэтому МП должен закончить выполнение текущей микрокоманды или команды и только после этого приступить к удовлетворению запроса. При этом промежуточные результаты работы МП по программе должны быть зафиксированы в регистрах и переданы на хранение в память. После удовлетворения запроса и обработки прерывания зафиксированные в памяти промежуточные результаты должны быть возвращены обратно в регистры МП. Такой порядок реализации процесса прерывания дает возможность переходить от программы к подпрограмме обработки прерываний и обратно без потерь промежуточной информации и без нарушений процесса вычислений. Если МП построен так, что нельзя прервать прерывающую программу, то считается, что МП имеет нулевой уровень программного прерывания.
Для большинства МП имеется возможность обеспечения многократного прерывания прерываний. В этом случае допускаются прерывания внутри прерываний, что ведет к появлению последовательности вложенных друг в друга подпрограмм. Для сохранения и возврата данных при реализации прерываний используется стек. Стек представляет собой совокупность ячеек памяти, организованных так, что обращение к списку слов может происходить в процессе, обратном записи. В стеке последнее из записанных слов считается первым. В стеке всегда чтение или запись происходит в верхней ячейке. При удовлетворении запроса на прерывание текущей программы осуществляется запись состояния рабочих регистров МП в стек, при этом автоматически добавляется в указатель стека единица после каждой записи. Поэтому с помощью одной команды «Записать состояние в стек» осуществляются считывание регистров и хранение содержимого в стеке. Восстановление также происходит автоматически по команде «Восстановить состояние прерванной программы», которая ставится последней в подпрограмме прерывания.
Запросы прерывания в большинстве МП делятся на немаскируемые и маскируемые.
Немаскируемые запросы на прерывание реализуются аппаратно вне программного контроля и не управляются программно. Эти прерывания имеют высший приоритет, исполняются ранее других запросов на прерывания. Примерами немаскируемых запросов могут служить запросы на прерывания от схем питания, схем контроля правильности передачи данных.
Маскируемые запросы на прерывания управляются командами программы и обеспечивают возможность гибкого управления вычислительным процессом.
Для определения адреса программы при прерывании по запросу от внешнего устройства используются различные методы, которые различаются числом дополнительных схем в МП или в контроллере внешнего устройства.
Наиболее простой метод основан на записи кода адреса памяти, где записана подпрограмма прерывания, в специальном регистре адреса прерывания. Другой метод основан на асинхронном запросе со стороны МП внешним устройством с целью определения устройства, которое выработало сигнал запроса на прерывание. По запросу МП контроллер внешнего устройства выставляет код команды, вызывающий ветвление в устройстве управления МП по одному из множества адресов. В сложных МП используется специальный регистр вектора прерывания для задания векторов прерываний внешних устройств.
Организация ввода-вывода данных.Существуют различные способы обмена данными между МП и другими устройствами.
При программном обмене данными по командам условного перехода МП определяет программным путем, готово ли внешнее устройство к выполнению операций ввода-вывода до начала передачи данных. МП считывает информацию о состоянии готовности внешнего устройства, передает ее во внутренний регистр и на основе анализа результата принимает решение о готовности устройства. При этом МП находится в режиме программного ожидания готовности внешнего устройства, выполняя соответствующую подпрограмму. После обнаружения готовности МП передает данные и затем приступает к продолжению основной программы.
При обмене данными по сигналам прерывания работы МП от внешних устройств последние являются сами инициаторами обмена. МП работает параллельно с внешними устройствами по основной программе и не занимается анализом состояния внешних устройств. В этом случае в МП предусматриваются специальные средства анализа состояния внешних устройств. При выполнении сигнала готовности к обмену от какого-либо внешнего устройства МП завершает текущую операцию, передает на хранение в память всю информацию и переходит к подпрограмме обслуживания прерывания. Основной частью этой подпрограммы является команда обмена данными между МП и внешними устройствами. В конце подпрограммы включается подпрограмма возврата к основной программе.
При обмене данными между внешними устройствами и памятью нет необходимости пересылать данные через микропроцессор. Для этих целей используется обмен данными в канале прямого доступа. Вводится специальный контроллер прямого доступа в память, который берет на себя управление передачей без применения МП. Средства канала прямого доступа подключаются параллельно МП. Разделение единого информационного канала между МП и каналом прямого доступа осуществляется посредством использования трехуровневого состояния информационных шин МП.
Во время передачи информации по каналу прямого доступа МП переводит выходные схемы управления шинами данных, адреса и управления в высокоомные состояния и тем самым изолируется от остальной части системы.
ВТОРОЙ ВОПРОС
Типовая структура микропроцессора приведена на рис. 4. Микропроцессор состоит из трех основных блоков: арифметическо-логическое устройство (АЛУ), блок внутренних регистров, устройство управления. Объединяет эти блоки интерфейс.
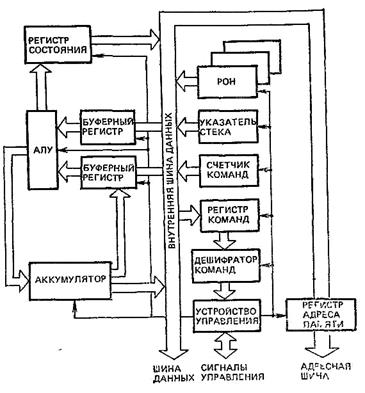
Рис. 4 Типовая структурная схема микропроцессора.
АЛУ и блок внутренних регистров часто объединяют в один блок, который называют операционным блоком (ОБ). Для передачи данных между этими блоками используется внутренняя шина данных.
Арифметическо-логическое устройство выполняет одну из главных функций микропроцессора — обработку данных. Перечень функций АЛУ зависит от типа микропроцессора. Некоторые АЛУ способны выполнять множество различных операций, у других набор операций ограничен. Функции АЛУ определяют архитектуру микропроцессора в целом.
Арифметическо-логическое устройство состоит из двоичного сумматора со схемами ускоренного переноса,. сдвигающего регистра и регистров для временного хранения операндов. Обычно это устройство выполняет по командам несколько простейших операций: сложение, вычитание, сдвиг, пересылку, логическое сложение (ИЛИ), логическое умножение (И), сложение по модулю 2, инверсия, приращения положительное и отрицательное.
Важная составная часть микропроцессора — регистры. Каждый регистр микропроцессора можно использовать для временного хранения одного слова данных. Некоторые регистры имеют специальное назначение, другие – многоцелевое. Последние называются регистрами общего назначения (РОН) и могут использоваться программистом по его усмотрению. Количество и назначение регистров в микропроцессоре зависят от его архитектуры.
Регистры общего назначения (РОН). Большинство МП имеют в своем составе набор регистров, используемых в качестве запоминающих устройств. Так как АЛУ может совершать операции с содержимым РОН без выхода на внешнюю магистраль адресов и данных, то они происходят много быстрее, чем операции с внешней памятью. Поэтому иногда РОН называют сверхоперативной памятью. Количество РОН и возможность программного доступа к ним у равных микропроцессоров различны.
Буферный регистр предназначен для временного хранения (буферирования) данных.
Буферный регистр адреса служит для приема и хранения адресной части исполняемой команды. Иначе говоря, адрес слова в нем содержится до выдачи на адресную шину. Возможное количество адресов, т. е. непосредственно адресуемых слов памяти, определяется разрядностью этого регистра. Так, в 16-разрядном регистре, изменяя значения разрядов двухбайтового слова, можно поместить любое из 216 = 65536 адресов ячеек (слов) памяти.
Буферный регистр данных используется для временного хранения выбранного из памяти слова перед выдачей его во внешнюю шину данных. Его разрядность определяется количеством байтов информационного слова.
Устройство управления управляет работой АЛУ и внутренних регистров в процессе выполнения команды. Согласно коду операции, содержащемуся в команде, оно формирует внутренние сигналы управления блоками МП. Адресная часть команды совместно с сигналами управления используется для считывания данных из определенной ячейки памяти или для записи данных в
ячейку. По сигналам УУ осуществляется выборка каждой новой, очередной команды.
Для стандартного подключения к МП портов внешних устройств и запоминающего устройства служит интерфейс, в состав которого входят буфер адреса (БА), буфер данных (БД), шины. Шина данных (ШД) предназначается для передачи чисел и команд, с которыми работает МП. Шина адреса (ША) используется для адресации памяти и внешних устройств. По шине управления (ШУ) передаются управляющие сигналы от внешних устройств к МП и обратно.
Конкретные МП могут отличаться друг от друга, но каждый из них содержит следующие основные узлы и устройства: арифметическо-логическое устройство (АЛУ); устройство управления (УУ); регистры (Рг); интерфейс.
ТРЕТИЙ ВОПРОС
Аккумулятор — это главный регистр микропроцессора при различных манипуляциях с данными. Большинство арифметических и логических операций осуществляется путем использования АЛУ и аккумулятора. Любая из таких операций над двумя словами данных (операндами) предполагает размещение одного из них в аккумуляторе, а другого в памяти или каком-либо регистре. Так, при сложении двух слов, называемых условно А и Б и расположенных в аккумуляторе и памяти соответственно, результирующая сумма С загружается в аккумулятор, замещая слово А. Результат выполнения операции АЛУ тоже обычно размещается в аккумуляторе, содержимое которого при этом теряется.
Операцией другого типа, использующей аккумулятор, является программируемая передача данных из одной части микропроцессора в другую. Например, пересылка данных между портом ввода-вывода и памятью, между двумя областями памяти и т. д. Выполнение операции «программируемая передача данных» осуществляется в два этапа: сначала выполняется пересылка данных из источника в аккумулятор, затем — из аккумулятора в пункт назначения.
Микропроцессор может выполнять некоторые действия над данными непосредственно в аккумуляторе. Например, аккумулятор можно очистить путем записи двоичных нулей во все его разряды, установить в единичное состояние путем записи во все его разряды двоичных единиц. Содержимое аккумулятора можно сдвигать влево или вправо, получать его инвертированное значение, а также выполнять другие операции.
Аккумулятор является наиболее универсальным регистром микропроцессора: для выполнения любой операции над данными, прежде всего, необходимо поместить их в аккумулятор. Данные поступают в него с внутренней шины данных микропроцессора. В свою очередь, аккумулятор может посылать данные на эту шину.
Количество разрядов аккумулятора соответствует длине слова микропроцессора, однако некоторые микропроцессоры имеют аккумуляторы двойной длины. В дополнительные разряды аккумулятора записываются при этом биты, появляющиеся при выполнении некоторых арифметических операций. Например, при умножении двух 8-битовых слов результат (16-битовое число) размещается в аккумуляторе двойной длины.
Счетчик команд — это один из наиболее важных регистров микропроцессора. Как известно, программа — это последовательность команд (инструкций), хранимых в памяти микроЭВМ и предназначенных для того, чтобы инструктировать машину, как решать поставленную задачу. Для корректного ее выполнения команды должны поступать в строго определенном порядке. Счетчик команд обеспечивает формирование адреса очередной команды, записанной в памяти.
Когда микропроцессор начинает работать, то по команде начальной установки в счетчик команд загружаются данные из области памяти, заданной проектировщиком микропроцессора. Когда программа начинает выполняться, первым значением содержимого счетчика команд является этот, заранее определенный адрес.
В отличие от аккумулятора счетчик команд не может выполнять операции различного типа. Набор команд, его использующих, крайне ограничен по сравнению с подобным набором для аккумулятора.
Перед выполнением программы счетчик команд необходимо загрузить адресом, указывающим на первую команду программы. Адрес первой команды программы посылается по адресной шине к схемам управления памятью, в результате чего считывается ее содержимое по указанному адресу. Далее эта команда передается в специальный регистр микропроцессора, называемый регистром команд.
После извлечения команды из памяти микропроцессор автоматически дает приращение содержимому счетчика команд. Это приращение счетчик команд получает в тот момент, когда микропроцессор начинает выполнять команду, только что извлеченную из памяти. Следовательно, с этого момента счетчик команд содержит адрес следующей команды.
Счетчик команд можно загрузить иным содержимым при выполнении особой группы команд. Может возникнуть необходимость выполнить часть программы, которая «выпадает» из последовательности команд основной (главной) программы. Например, такую часть программы, которая повторяется в процессе выполнения всей программы. Вместо того чтобы писать эту часть программы каждый раз, когда в ней возникает необходимость, ее записывают один раз и возвращаются к ее повторному выполнению, отступая от указанной последовательности. Часть программы, выполняемая путем отступления от последовательности команд главной программы, называется подпрограммой. В данном случае в счетчик команд непосредственно записывается требуемый адрес.
Часто счетчик команд имеет намного больше разрядов, чем длина слова данных микропроцессора. Так, в большинстве 8-разрядных микропроцессоров, число разрядов счетчика команд равно 16.
Регистр команд содержит команду в процессе ее дешифрования и выполнения. Входные данные поступают в регистр из памяти по мере последовательной выборки команд. Обычно существует возможность записи данных в регистр команд при помощи набора переключателей и кнопок на пульте управления ЭВМ. Как правило, этой возможностью пользуются для передачи управления в начало программы.
Регистр адреса памяти при каждом обращении к памяти микроЭВМ указывает адрес области памяти, подлежащей использованию микропроцессором. Регистр адреса памяти содержит двоичное число — адрес области памяти. Выход этого регистра называется адресной шиной и используется для выбора области памяти или порта ввода—вывода.
В течение выборки команды из памяти регистры адреса памяти и счетчика команд имеют одинаковое содержимое, т.е. регистр адреса памяти указывает местоположение команды, извлекаемой из памяти. После декодирования команды счетчик команд получает приращение в отличие от регистра адреса памяти.
В процессе выполнения команды содержимое регистра адреса памяти зависит от выполняемой команды. Если в соответствии с командой микропроцессор должен произвести еще одно обращение к памяти, то регистр адреса памяти подлежит вторичному использованию в процессе обработки этой команды. Для некоторых команд, например команды очистки аккумулятора, адресация к памяти не требуется. При обработке таких команд регистр адреса памяти используется лишь один раз — в течение выборки команды из памяти.
В большинстве микропроцессоров регистры адреса памяти и счетчика команд имеют одинаковое количество разрядов. Как и счетчик команд, регистр адреса памяти должен располагать количеством разрядов, достаточным для адресации любой области памяти микроЭВМ. У большинства 8-разрядных микропроцессоров количество разрядов регистра адреса памяти равно 16.
Поскольку регистр адреса памяти подключен к внутренней шине данных микропроцессора, он может загружаться от различных источников. Большинство микропроцессоров располагают командами, позволяющими загружать этот регистр содержимым счетчика команд, регистра общего назначения или какой-либо области памяти. Некоторые команды предоставляют возможность изменять содержимое регистра адреса памяти путем выполнения вычислений: новое значение содержимого этого регистра получается путем сложения или вычитания содержимого счетчика команд с числом, указанным в самой команде. Адресация такого типа называется адресацией с использованием смещения.
Регистр состояния предназначен для хранения результатов некоторых проверок, осуществляемых в процессе выполнения программы. Разряды регистра состояний принимают то или иное значение при выполнении операций, использующих АЛУ и некоторые регистры. Запоминание результатов упомянутых проверок позволяет использовать программы, содержащие
переходы (нарушения естественной последовательности выполнения команд).
При наличии в программе перехода по заданному признаку выполнение команд начинается с некоторой новой области памяти, т.е. счетчик команд загружается новым числом. В случае условного перехода такое действие имеет место, если результаты определенных проверок совпадают с ожидаемыми значениями. Указанные результаты находятся в регистре состояния. Регистр состояния предоставляет программисту возможность организовать работу микропроцессора так, чтобы при определенных условиях менялся порядок выполнения команд.
Рассмотрим некоторые наиболее часто используемые разряды регистра состояния.
1. Перенос/заем. Данный разряд указывает, что последняя выполненная операция сопровождалась переносом или заемом (отрицательным переносом). Значение разряда переноса устанавливается равным 1, если в результате сложения двух чисел имеет место перенос из старшего разряда АЛУ. Отрицательный перенос (заем) фиксируется в регистре состояния при вычитании большего числа из меньшего.
2. Нулевой результат. Принимает единичное значение, если после окончания операции во всех разрядах регистра результата обнаружены двоичные нули. Установка этого разряда в 1 происходит не только при отрицательном приращении содержимого регистра, но и при любой другой операции, результат которой — число из двоичных нулей.
3. Знаковый. Принимает единичное значение, когда старший значащий бит содержимого регистра, предназначенного для записи результата операции, становится равным 1. При выполнении арифметических операций с числами в дополнительн
Дата добавления: 2015-12-08; просмотров: 3073;