Системы управления ПР
Системы управления ПР предназначены для управления его работой и организации его взаимодействия с технологическим оборудованием (рис. 3.1).
ПР состоит из манипулятора 2 и системы управления 4. Внешняя по отношению к роботу среда включает обычно технологическое оборудование /, которое обслуживает робот и транспортирующую позицию 10 (выходной участок непрерывного или дискретного транспорта, вибробункер, лоток с ориентированными и неориентированными деталями и т. п.). Сие-
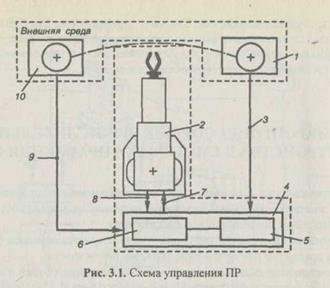
тема управления формирует информационный поток, содержащий набор команд для управления манипулятором.
Этот поток формируется на основе информации о состоянии манипуляторов (поток 8) и информации о состоянии внешней среды (потоки 3 и Р). Информация о состоянии манипулятора — это совокупность сигналов, например, с конечных выключателей, путевых датчиков о положении элементов манипулятора. Эти сигналы говорят, например, что захват выдвинут до упора или на расстояние S и разжат, их достаточно, чтобы с некоторой степенью точности управлять положением рабочих органов манипулятора в пространстве, однако его работа не будет синхронизирована с работой станка и транспортирующей системы.
Обычно необходимы синхронизирующие сигналы по цепи 3 о готовности технологического оборудования, и сигнал по цепи 9 о присутствии полуфабриката. Только при наличии обоих синхросигналов система управления выдает команду на начало цикла работы манипулятора.
Управляющие команды на манипулятор часто простым механическим, математическим или преобразованием внешней или внутренней информации не могут быть сформированы или это оказывается сопряженным с большим числом трудностей, например, с необходимостью очень большого числа сигналов. Так, если необходимо остановить захват в некотором промежуточном положении при первом проходе и не останавливать при втором, помимо наличия сигналов с датчика промежуточного положения необходимо еще считать и запоминать проходы.
Система управления в этом случае, кроме блока преобразования информации 6, должна иметь память 5, наличие которой существенно уменьшает число необходимых для управления сигналов.
Дата добавления: 2015-10-29; просмотров: 1239;