Промышленные роботы для автоматизированного производства
Промышленный робот (ГОСТ 25686—85) — автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства управления в производственном процессе двигательных и управляющих функций. Под манипулятором понимают управляемое устройство или орган для выполнения двигательных функций, аналогичных функциям руки человека для перемещении объектов в пространстве.
Промышленные роботы (ПР) в производстве ЭВМ успешно применяют в составе автоматического оборудования, реализующего основные и вспомогательные технологические операции. В число основных операций, на которых используются ПР, входят: сборка (свинчивание, склеивание, сварка); монтаж (пайка, накрутка); защитно-декоративные (окраска, лакировка, гальванические покрытия); контроль (входной, выходной). На вспомогательных операциях ПР используют для складирования продукции, инструмента, оснастки; упаковки (укладки) изделий в тару; транспортирования заготовок, деталей, инструмента, оснастки в зону обработки (сборки) и из нее; удаление отходов при обработке (сборке) от основного оборудования; смены инструмента и оснастки в автоматическом сборочном технологическом оборудовании; выполнения ряда подготовительных операций (зачистка, отмывка поверхностей деталей и т. д.).
Конкретные конструкции ПР, их компоновка и технические характеристики приводятся в соответствующих каталогах и справочниках, что позволяет решать практические вопросы, связанные с их выбором для компоновки сборочных автоматических линий и роботизированных технологических комплексов (РТК). Они наряду с другими автоматами выступают в качестве элементной базы для построения различных типов и назначения автоматизированных линий, а также более сложных автоматических и кибернетических систем, какими являются гибкие производственные системы (ГПС).
Структура любого ПР (рис. 2.4) независимо от его типа и назначения состоит из механической части (III), инструментальной системы (V), датчиков внешней (II) и внутренней (I) информации, системы управления (IV).
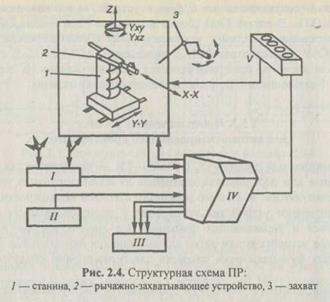
Механическая часть, несущая рабочие и другие органы промышленного робота и осуществляющая все необходимые их перемещения (линейные горизонтальные или вертикальные, поворачивание, качение, захваты), состоит из станины и рычажно-захватывающего устройства, расположенного сверху станины. Рычажно-захватывающее устройство (основной рабочий орган ПР) представляет собой разомкнутый многозвенный механизм, состоящий из рычажного устройства с приводом. Рычажно-захватывающие устройства разделяют по типу конструкции, типу приводов и числу степеней свободы (3—5 степеней).
Основное назначение системы управления ПР — формирование логической последовательности его действия и обеспечение автоматической работы рычажного, захватного и других устройств в соответствии с заданной программой, осуществление связи между действиями самого ПР и обслуживаемого им технологического оборудования, а также контроль за рабочей зоной работы с целью устранения несчастных случаев. Применяемые в настоящее время системы управления ПР можно условно разделить на жестко программируемые (позиционно-цикловые, позиционно-аналоговые, позиционно-числовые), контурные (импульсные, числовые), комбинированные (позиционно-контурные), управляемые от ЭВМ. Системы управления с жесткой программой предназначены для выполнения повторяющихся операций в неизменной среде, имеют механическую память и задают движение рабочим органам промышленного робота в виде последовательности
значений требуемых положений. Системы управления на базе ЭВМ осуществляют последовательность выполнения операций по программе. Гибкость и многофункциональность системы управления достигается самообучением, предусмотренным в программном обеспечении ЭВМ.
Дата добавления: 2015-10-29; просмотров: 1038;