Основные показатели качества процесса регулирования.
Переходные процессы в промышленных САР должны иметь определенный характер, диктуемый правилами технологии производства. Для оценки поведения САР в установившихся и переходных режимах используются показатели процесса качества регулирования. Они представляют собой динамические характеристики свойств системы при типовых воздействиях на нее.
рис 1
рис. 2
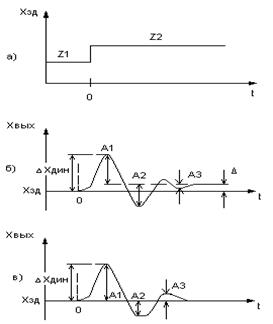
Переходный процесс по задающему воздействию Переходные процессы по возмущающему воздействию в статической (б) и астатической (в) системах в статической (б) и астатической (в) системах.
На рис 1 представлены типичные переходные процессы в системе автоматического регулирования при ступенчатом изменении (рис 1 (а)) задающего воздействия на регулятор (переходные процессы по управляющему воздействию). Рис 1(б) соответствует статической системе, принципиально имеющей ошибку регулирования в установившемся режиме. Астатические САР за счет наличия интегрирующих звеньев теоретически не имеют статической ошибки отработки ступенчатого сигнала (рис 1(в)). Аналогично на рис 2 представлены типичные переходные процессы в САР при ступенчатом изменении возмущающего воздействия на систему. В этом случае. поскольку задающее воздействие на систему не меняется, регулируемая величина возвращается с некоторой точностью к заданному значению.
1. Установившаяся ошибкаΔ- характеризует отклонение установившегося значения регулируемой величины от заданного значения в конце переходного процесса. В общем случае установившаяся ошибка складывается из статической ошибки системы ΔXст и ошибки , обусловленной наличием зоны нечувствительности регулятора Δнеч. Для астатических систем ΔXст=0.
2. Максимальное динамическое отклонение регулируемой величиныΔXдин. Это наибольшее отклонение регулируемой величины от заданного значения, которое имеет место в переходном процессе при ступенчатом воздействии на систему. Иногда называется забросом регулируемой величины. Имеет важное значение в тех случаях, когда по технологическим условиям недостаточно даже временно, значительное отклонение регулируемой величины от заданного значения.
3. 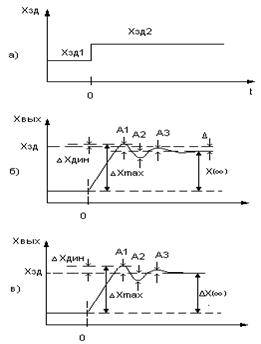 Перерегулированиеδ – характеризует колебательность переходного процесса в системе при ступенчатом воздействии. Обычно выражается в процентах. Для переходных процессов по управляющему воздействию перерегулирование вычисляется: δ=(ΔXmax – ΔX(∞))*100%/ΔX(∞) Для переходного процесса по возмущению перерегулирование вычисляется как отношение амплитуды А2 второго полупериода отклонения регулируемой величины к амплитуде А1 первого полупериода. δ=А2/А1*100%
Перерегулированиеδ – характеризует колебательность переходного процесса в системе при ступенчатом воздействии. Обычно выражается в процентах. Для переходных процессов по управляющему воздействию перерегулирование вычисляется: δ=(ΔXmax – ΔX(∞))*100%/ΔX(∞) Для переходного процесса по возмущению перерегулирование вычисляется как отношение амплитуды А2 второго полупериода отклонения регулируемой величины к амплитуде А1 первого полупериода. δ=А2/А1*100%
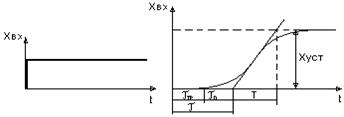
4. Время регулирования или время переходного процесса.Теоретически переходный процесс в САР после приложения воздействия продолжается бесконечно. Для практической оценки за длительностью переходного процесса регулирования принято считать отрезок времени tp ,по истечении которого отклонение регулируемой величины от нового установившегося значения не будет превышать некоторого значения ε. Для переходного процесса по управлению ε=0.05ΔX(∞)Для переходного процесса по возмущению ε=0.05A1.Время регулирования определяется графически (рис 3)
Рис 3 Определение времени регулирования
Время регулирования характеризует быстродействие системы автоматического регулирования.
5.Степень колебательности переходного процесса m равна числу колебаний за время регулирования tp Большая степень колебательности приводит к износу механизмов и нежелательна по техническим соображениям. В правильно спроектированной и настроенной САР степень колебательности равна 2..3.
6.Степень затухания переходного процесса ψ показывает насколько уменьшится амплитуда колебании регулируемой величины за время одного периода. Она определяется как отношение разности двух соседних одноименных амплитуд колебаний регулируемой величины к первой из этих амплитуд. ψ=A1-A3/A1.
 Выбор автоматических регуляторов.
Выбор автоматических регуляторов.
Регулятор предназначенный для конкретной системы автоматического регулирования должен обеспечивать точность поддержания значения управляемых технологических параметров при оптимизации критерия качества процесса регулирования (показатели качества) устойчивости работы системы , а так же должен быть экономически эффективным и надежным в эксплуатации .
Проектирование САУ ведут в следующей последовательности:
1)Составляют упрощенную технологическую схему объекта регулирования. Изучают технологический регламент и анализируют показатели нормального функционирования объекта.
2) Выбирают основную регулируемую величину, исходя из использования одноконтурной замкнутой автоматической системы, и формируют цель регулирования. Определяют допустимые значения статистических и динамических отклонений от заданного значения. Затем выбирают регулирующее воздействие. Выбранная в качестве регулирующей входная величина должна следующим требованиям : а) степень регулирующего воздействия должна быть достаточной для получения необходимой точности регулирования б) статистические характеристики объекта регулирования должны быть предварительно изучены и по возможности линеализированны в) должны быть проанализированы запаздывания в передаче управляющего сигнала. Если отсутствуют надежные первичные измерительные преобразователи для получения информации о регулируемой величине, то используют принцип управления по возмущениям. В этом случае чаще всего управление процесса осуществляется регулятором соотношения вещества или энергии, являющихся нагрузкой объекта.
3) Составляют упрощенную структурную схему системы.
4) Выбирают измерительный преобразователь и регулирующий орган.
5)Определяют динамические параметры объекта регулирования.
6) Определяют характер и значение возмущающих воздействий, которые испытывает объект (скачкообразное, пиковое или монотонно-нарастающее).
7)Предварительно выбирают закон регулирования. Импульсные или релейные регуляторы позиционного действия выбирают в том случае, когда информация о состоянии регулируемого объекта поступает непрерывно, регулирующее воздействие осуществляется только в дискретные моменты времени. Во всех остальных случаях используют непрерывные законы регулирования.
8)Устанавливают требуемые или заданные показатели качества регулирования, используя прежде всего данные технологического регламента, причем процесс регулирования в случае применения релейных регуляторов будет автоколебательным, а в случае применения непрерывных регуляторов – затухающим.
9)Проверяют пригодность выбранного типа регулируемого воздействия, сравнивая заданное значение показателей качества процесса регулирования с их фактическими значениями. последние определяют по таблицам или по монограммам в зависимости от значений динамических параметров объекта и возбуждений по нагрузке. Если выбранный тип регулирующего воздействия можно регулировать с помощью нескольких законов регулирования, то параллельно выбирают оптимальный закон регулирования. При этом с точки зрения экономической эффективности и надежности выбирают самый простой из законов регулирования, обеспечивающий качество регулирования.
10)Анализируя возможность улучшения динамических свойств системы за счет применения менее инерциальных исполнительных механизмов, а также за счет изменения места установки регулирующих органов.
 11)Осуществляют аппаратную реализацию САР выбирают автоматический регулятор, исполнительный механизм, регулирующий орган, таким образом выбор прибора автоматического регулирования проводят начиная с одноконтурной системы регулирования и простейшего закона регулирования. Закон регулирования усложняют до тех пор, пока не будут достигнуты требуемы показатели качества регулирования.
11)Осуществляют аппаратную реализацию САР выбирают автоматический регулятор, исполнительный механизм, регулирующий орган, таким образом выбор прибора автоматического регулирования проводят начиная с одноконтурной системы регулирования и простейшего закона регулирования. Закон регулирования усложняют до тех пор, пока не будут достигнуты требуемы показатели качества регулирования.
Дата добавления: 2015-10-19; просмотров: 6196;