Статические и астатические системы
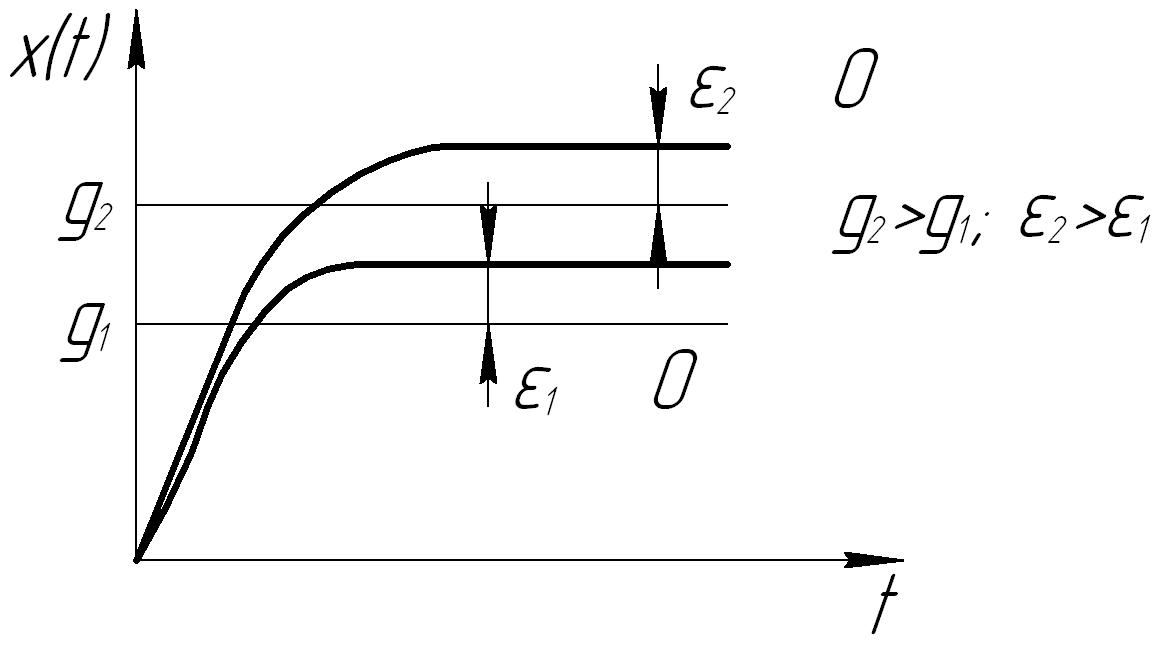
В статических САУ при постоянном входном задающем и возмущающем воздействии по окончанию переходного процесса на выходе системы устанавливается постоянное значение управляемой величины Х(t), зависящее от этого воздействия. При этом ошибка e(t)= g(t) - y(t)= g(t) - k∙х(t) ≠ 0= e2(t) =const.
Регуляторы в таких САУ называют пропорциональными регуляторами или П-регуляторами.

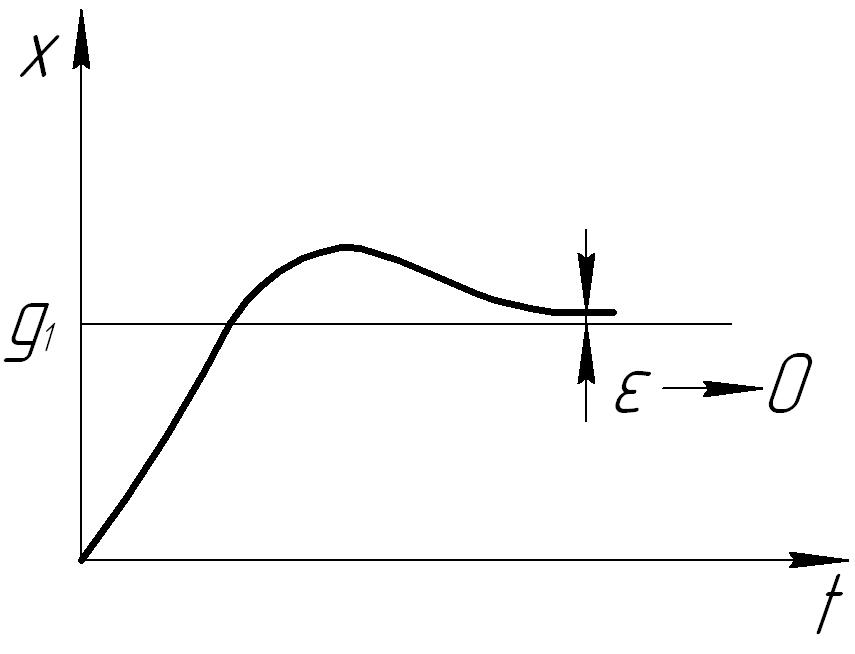
В астатических САУ при таком же воздействии на выходе системы в установившемся режиме отклонение управляемой величины стремится к нулю независимо от воздействия e(t) = 0. Регуляторы в таких САУ называются дифференциальными Д-регуляторами.
Дата добавления: 2015-09-07; просмотров: 1326;