В зависимости от приложения управляющего воздействия
а) САУ по отклонению:
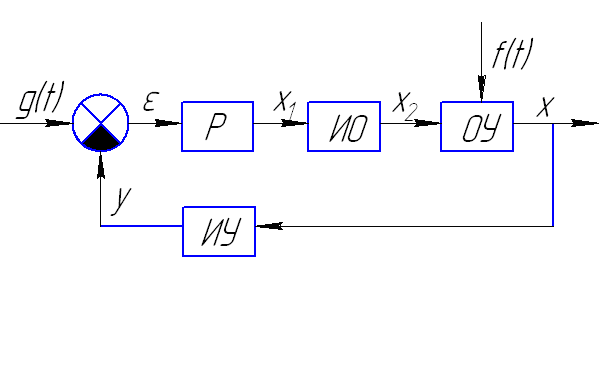
Подавляющее большинство САУ построено на принципе контроля управляемой величины x(t) от задающего воздействия g(t). В таких системах измеряется управляемая величина у = k∙х(t), в результате чего определяется ошибка e (t)= g(t) - y(t)= g(t) - k∙х(t).
Реакцией системы на возникшее отклонение e (t) управляемой величины х(t), является действие, направленное на ликвидацию этого отклонения. При этом система воздействует не на само возмущение f(t), оказывающее влияние на объект управления и являющееся первопричиной изменения управляемой величины х(t), а на саму управляемую величину х(t).
б) САУ по возмущению:
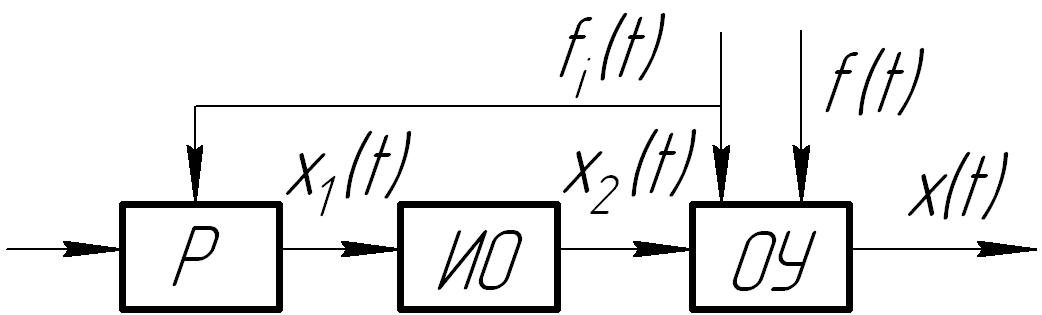
При управлении по возмущению контролируется одно из всех возможных возмущений, которое в данных условиях работы оказывает решающее влияние на состояние объекта управления.
В таких системах измеряется основное возмущение f(t) и производится компенсация его влияния.
Принцип управления по возмущению получил название инвариантности, т.е. независимости от внешнего возмущения.
Недостаток: при действии других возмущений САУ оказывается неработоспособной.
б) комбинированная САУ:
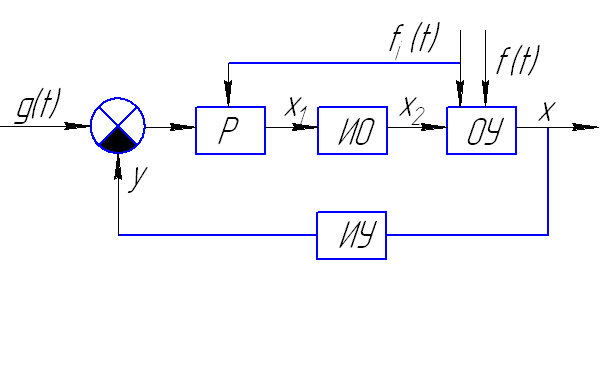
Комбинированная САУ объединяет САУ по отклонению и по возмущению.
Дата добавления: 2015-09-07; просмотров: 1419;