Принцип определения текущих координат движущейся машины
Работа навигационной аппаратуры сводится к непрерывному измерению проходимого машиной пути и днрекционного угла направления движения и вычислению на основе этих данных координат местоположения движущейся машины.
Допустим, движение машины начинается из точки О, координаты которой х0 и у0 известны, например определены по карте. Двигаясь прямолинейно, машина переместилась в точку. Ее координаты Х и у.
Из рисунка видно, что прямоугольные координаты машины в точке / будут:
|
Приращения координат А* и Аг/ зависят от длины пути, пройденного машиной, и направления ее движения. Они вычисляются по формулам:
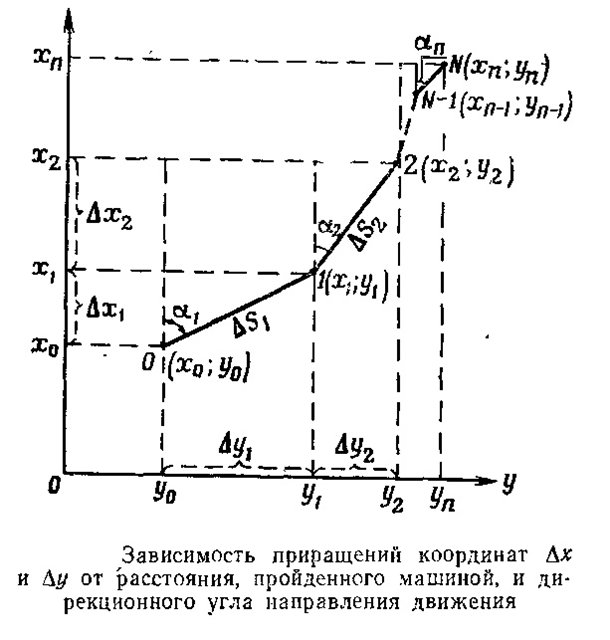
Таким образом, текущие координаты движущейся машины равны алгебраической сумме координат начальной точки и приращений Ах и Ау, вычисленных аппаратурой в процессе движения машины от начальной точки до данной.
Основные приборы навигационной аппаратуры
Для решения указанных выше уравнений ННА типа «координатор» имеет следующие основные приборы:
— датчик пути, который непрерывно определяет величину приращения пройденного пути AS;
— датчик курса, обеспечивающий определение дирекционного угла а направления движения машины в каждый момент времени;
– счетно-решающее устройство, которое непрерывно вычисляет прямоугольные координаты местоположения машины по данным, поступающим в него от датчиков пути и курса.
Принципиальная схема такой аппаратуры показана ниже.
Курсопрокладчик кроме этих приборов имеет еще построительный механизм и планшет, на котором закрепляется карта. Карандаш построительного механизма, перемещаясь по планшету, указывает местоположение машины и вычерчивает путь ее следования.

Датчик пути представляет собой электромеханический прибор, учитывающий путь, проходимый машиной, и вырабатывающий соответствующий ему электрический сигнал. С ходовой частью машины датчик связан гибким валиком, число оборотов которого пропорционально проходимому машиной пути. Энергия механического вращения валика преобразуется в электрический сигнал с помощью так называемого сельсина-датчика. Этот сигнал и поступает в счетно-решающее устройство.
На величину пути, показываемую датчиком, влияют рельеф местности и дорожные условия. Движение машины по крутым склонам, пробуксовка или скольжение колес по грунту, отклонение давления в шинах колес от нормального и некоторые другие причины приводят к тому, что путь, показываемый датчиком, не соответствует действительному расстоянию, проходимому машиной. Поэтому для того чтобы получить действительное значение пути, пройденного машиной, в показания датчика пути необходимо ввести поправку – корректур у пути
Датчиком курса служит гироскопический курсоуказатель, принцип устройства которого такой же, как и гирополукомпаса.
До начала движения машины на шкале «Курс» устанавливают отсчет, равный дирекционному углу а продольной оси машины. При изменении направления оси машины в процессе движения датчик курса подает в счетно-решающее устройство электрический сигнал, пропорциональный изменению курса.
Счетно-решающее устройство постоянно определяет значения sin и cos он, перемножает S, на sin at и cos хг и передает полученные значения приращений координат, на шкалы координат х и у.
В аппаратуре типа «курсопрокладчик» вычисленные счетно-решающим устройством приращения координат поступают в построительный механизм, карандаш которого перемещается на отрезки, равные приращениям координат в масштабе карты, укрепленной на планшете.
Счетно-решающее устройство типа «координатор» состоит из синусно-косинусного, множительного и шкального механизмов.
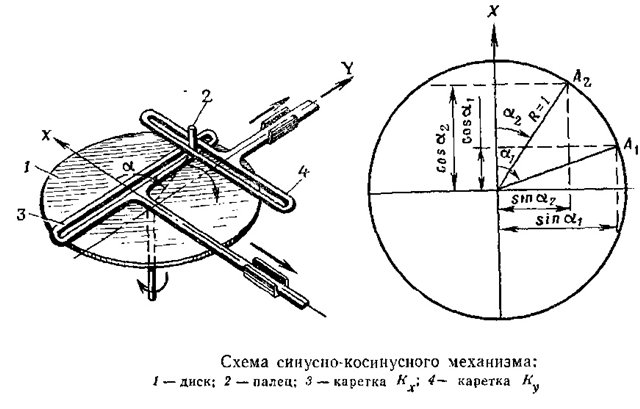
Синусно-косинусный механизм автоматически определяет численные значения синуса и косинуса дирекционного угла направления движения машины. Он представляет собой поворачивающийся диск, на котором укреплен палец, связанный с двумя каретками Кх и Ку. В целях ввода корректуры пути расстояние между центром диска и пальцем может меняться.
Если по сигналу от гирокурсоуказателя диск повернется на угол а, то каретка Кх под действием пальца переместится на величину, равную косинусу дирекционного угла машины, а каретка Kv – синусу этого угла. Каретки механически связаны с множительным механизмом.
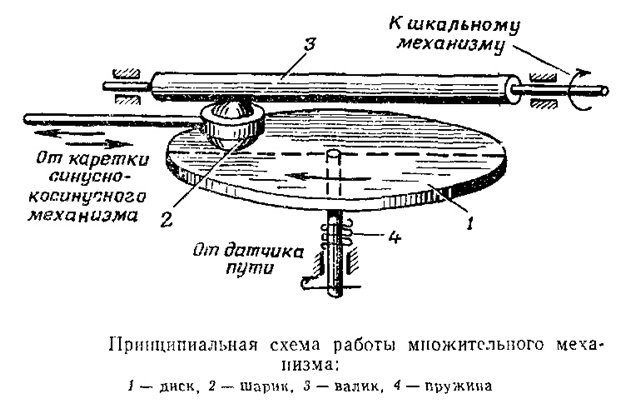
Множительный механизм предназначен для непрерывного умножения приращений пути AS на cos а и sin а. Он обычно выполняется в виде двух одинаковых фрикционов: один для определения Ах, второй – Ау Электрический сигнал, поступающий от датчика пути, с помощью сельсина-датчика счетно-решающего устройства преобразуется в механическое вращение диска / с числом оборотов, пропорциональным пути, проходимому машиной. Это вращение передается на валик 3 посредством промежуточного шарика 2, заключенного в обойму, который изменяет свое положение на диске под воздействием линейного перемещения одной из кареток синусно-косинусного механизма. Скорость вращения валика прямо пропорциональна произведению скорости вращения диска на расстояние шарика от центра диска. А это расстояние для одного фрикционного механизма пропорционально синусу дирекционного угла машины, а для другого – косинусу. Таким образом, угловая скорость вращения валика пропорциональна приращению соответствующей координаты.
При перемещении шарика относительно центра диска с одной его стороны на другую валик фрикционного механизма будет вращаться в обратном направлении. Тем самым учитываются знаки приращений.
Шкальный механизм предназначен для интегрирования приращений координат, поступающих из множительного механизма, а также для установки и считывания координат, дирекционного угла и корректуры пути.
Точность определения местоположения машины с помощью ННА зависит от приборных ошибок и погрешностей в определении исходных данных.
Основной причиной приборных ошибок является уход главной оси гироскопа. Считается допустимым, если он не превышает 35 делений угломера за час. Ошибки в работе счетно-решающего устройства на точность работы аппаратуры практически не влияют.
Величина ошибок, обусловленных уходом главной оси гироскопа и погрешностями определения исходного дирекционного угла и корректуры пути, тем больше, чем длиннее маршрут. Практика показывает, что на коротких маршрутах аппаратура позволяет определять местоположение машины с ошибкой 0,5–0,7% пройденного пути. При движении в течение 3–4 ч ошибка составляет 1,5–2% пройденного пути. Если же во время движения, хотя бы через каждый час, проверять работу аппаратуры по имеющимся на местности и обозначенным на карте ориентирам и вводить соответствующие поправки в установку дирекционного угла, корректуры пути и текущие координаты, то при движении на значительные расстояния ошибка определения координат аппаратурой не превысит 1,5% пройденного пути.
Дата добавления: 2015-10-13; просмотров: 1169;