Балансировка гироскопа курсоуказателя
Балансировка гироскопа курсоуказателя имеет целью так отрегулировать работу азимутального корректирующего устройства, чтобы в процессе движения машины уход главной оси гироскопа был минимальным.
Балансировка гироскопа производится при поступлении машины в часть, при перемене района эксплуатации аппаратуры более, чем на 4° по широте и при обнаружении неточностей в показаниях координат местоположения машины и курса.
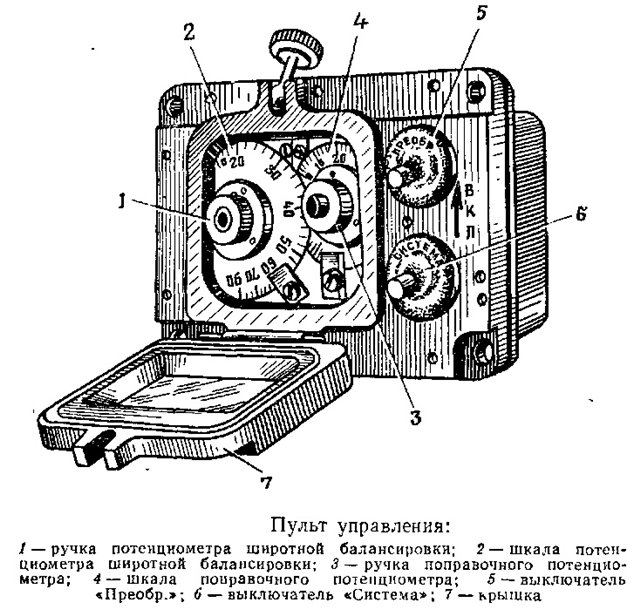
Для балансировки гироскопа на пульте управления имеются два потенциометра – широтной балансировки и поправочной балансировки. Шкала широтного потенциометра проградуирована в градусах географической широты от 0 до 90°. Шкала поправочного потенциометра проградуирована на 60 делений с оцифровкой через 10 делений.
Скорость ухода главной оси гироскопа в неподвижной машине и при ее движении неодинакова. Поэтому балансировку гироскопа обычно выполняют сначала грубо в неподвижной машине, а потом более точно – в движущейся.
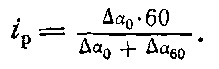
Номер деления ip, который необходимо установить на шкале поправочного потенциометра, рассчитывают по формуле
Для балансировки в неподвижной машине на шкале широтного потенциометра устанавливают географическую широту места. Включают аппаратуру, поправочный потенциометр ставят в положение «О», а на шкале «Курс» устанавливают угол 0–00. Спустя 5 мин по шкале «Курс» фиксируют уход гироскопа. После этого поправочный потенциометр ставят в положение «60», стрелку на шкале «Курс» возвращают в нулевое положение и вновь определяют уход гироскопа за 5 мин.
Определить уход гироскопа в движущейся машине было бы просто, если бы удалось поставить продольную ось машины после движения по какому-либо выбранному маршруту точно в такое же положение, какое она занимала до движения. Тогда разность отсчетов по шкале «Курс» до и после движения и была бы уходом гироскопа за время движения. Однако поставить машину точно в прежнее положение затруднительно. Поэтому уход гироскопа в движении определяют следующим образом.
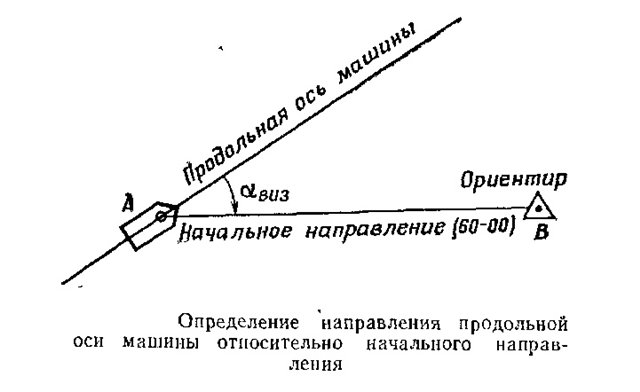
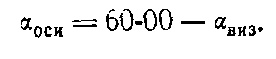
Выбирают на местности такую точку А, чтобы с нее хорошо был виден какой-либо удаленный ориентир В. Направление АВ принимают за начальное. Устанавливают машину на точке А, включают гирокурсоуказатель л определяют направление продольной оси машины относительно начального направления. Для этого с помощью визирного устройства машины измеряют угол авиз – На шкале «Курс» устанавливают отсчет, равный оси:
После 15–20-минутного движения по маршруту, начертание которого желательно выбирать в виде восьмерки, машину вновь устанавливают на точку А и записывают отсчет по шкале «Курс». Затем визируют на тот же ориентир В и определяют действительное направление продольной оси машины. Разность ак является величиной ухода гироскопа за время движения.
За 30 мин движения уход гироскопа подсчитывают по формуле

где / – время движения в минутах.
Пробег повторяют еще два раза, каждый раз устанавливая свой аоои и подсчитывая Да.
Из трех заездов определяют среднюю величину ухода гироскопа, которая не должна превышать 20 дел. угл. за 30 мин. При большей величине ухода шкалу поправочного потенциометра необходимо повернуть по ходу часовой стрелки, если Да имеет положительное значение, и против хода – при отрицательном Да. Поворачивать потенциометр следует на угол из расчета 5–6 дел. угл. за 30 мин на одно деление шкалы потенциометра.
Дата добавления: 2015-10-13; просмотров: 947;