ОПРЕДЕЛЕНИЕ КООРДИНАТ ТОЧЕК ОБЪЕКТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ
На рис.17 показана точка местности М. Ее положение в системе координат объекта OXYZ определяет вектор RM. Вектор D определяет положение той же точки относительно начала системы координат радиолокационной системы Sxyz. Вектор RSзадает начало системы координат радиолокационной системы Sxyzв системе координат объекта.

Рис.17
Нужно определить координаты точки М.
Из рис. следует, что
 (22)
(22)
Или в координатной форме
 (23)
(23)
Здесь  - координаты вектора D в системе координат объекта.
- координаты вектора D в системе координат объекта.
Эти координаты можно выразить через соответствующие координаты в системе координат радиолокационной системы:
 (24)
(24)
Для определения координат x,y,z в системе координат радиолокационной системы воспользуемся рис.18 , из которого следует, что
 (25)
(25)
D – наклонная дальность, которая берется со снимка.

Рис.18
Подставляя (24) и (25) в (23) получим:
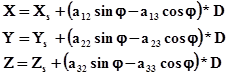 (26)
(26)
Элементы внешнего ориентирования радиолокационной системы известны из бортовых измерений. Неизвестным является угол φ.Его можно найти из третьего уравнения выражения (26) при условии, что высота точки Zизвестна.
Так как это уравнение нелинейно, то переходят к линейному уравнению поправок:
 , (27)
, (27)
в результате решения которого находится угол φ.
Угол φможно также найти, если известна высота фотографирования относительно определяемой точки  . Тогда, как следует из рис. 19
. Тогда, как следует из рис. 19
 (28)
(28)

Рис.19
Определив угол φ вычисляют координаты X и Y точки М по первым двум уравнениям выражений (26).
Дата добавления: 2015-09-07; просмотров: 901;