Внутреннее ориентирование снимка в системе координат цифрового изображения
Для обеспечения возможности определения координат точек в системе координат снимка по значению их координат в системе координат цифрового изображения производится процесс внутреннего ориентирования снимка, в результате которого определяются параметры, характеризующие положение и ориентацию системы координат снимка Sxyz в системе координат цифрового изображения ocxcyc , а так же параметры, позволяющие исключить влияние систематической деформации фотоматериала, на котором был получен исходный аналоговый снимок (рис.1.6).
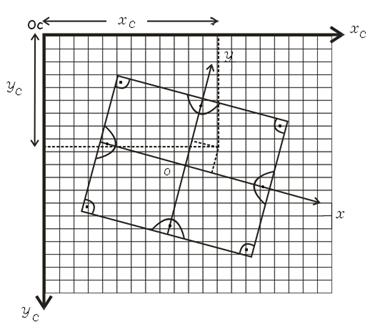
Рис.1.6
Для определения параметров внутреннего ориентирования снимка измеряют координаты изображений координатных меток снимка в системе координат цифрового изображения oC xC yC.
Выбор метода определения параметров внутреннего ориентирования снимка зависят от методики фотограмметрической калибровки съемочной камеры.
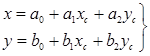
Если в результате фотограмметрической калибровки съемочной камеры были определены координаты координатных меток в системе координат съемочной камеры (снимка) Sxyz, то для определения координат точек в системе координат снимка по значениям их координат в системе цифрового изображения используют формулы аффинного преобразования координат:
 , (1.8)
, (1.8)
которые можно представить в развернутом виде:
 . (1.9)
. (1.9)
Формулы (1.8) позволяют не только определить положение и ориентацию системы координат снимка в системе координат цифрового изображения, но и учесть систематические искажения снимка, возникающие из-за деформации фотопленки, на которой был получен снимок.
Параметры аффинного преобразования ai, bi можно определить по координатам xc, yc координатных меток снимка, измеренных на цифровом изображении, и значениям координат x,y этих меток в системе координат снимка, полученным при калибровке съемочной камеры.
Для определения параметров ai,bi для каждой метки, измеренной на цифровом изображении, составляют уравнения:
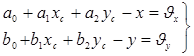 . (1.10)
. (1.10)
Полученную систему уравнений решают по методу наименьших квадратов и определяют в результате решения значения параметров ai, bi . Для их определения необходимо не менее 3 координатных меток, не лежащих на одной прямой.
В практике фотограмметрии возникает задача определения
значений координат точек с системе координат цифрового изображения по координатам этих точек, полученным в системе координат снимка. Такое преобразование координат выполняется по формулам:
 (1.11)
(1.11)
или
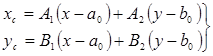 . (1.12)
. (1.12)
В формулах (1.11) и (1.12) Ai, Bi – элементы обратной матрицы Р-1.
Значение пиксельных координат точек xp,yp определяют по формулам:
 . (1.13)
. (1.13)
В случае, если при калибровке съемочной камеры определялись калиброванные расстояния между координатными метками lx, ly
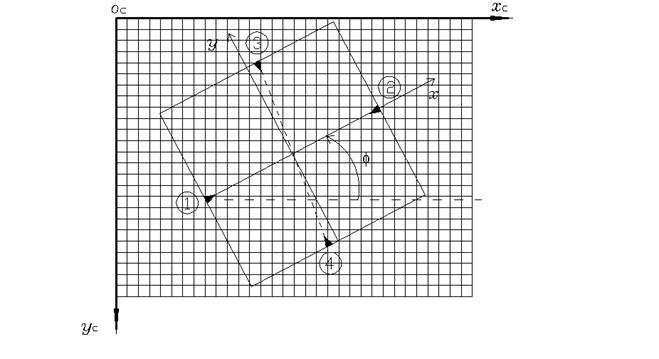
Рис.1.7
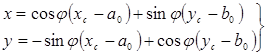
(рис.1.7), для определения координат точек в системе координат снимка по измеренным координатам точек в системе координат цифрового изображения используют формулы:
 , (1.14)
, (1.14)
в которых:
a0, b0 – координаты начала системы координат снимка в системе координат цифрового изображения;
 - угол разворота оси х системы координат снимка относительно оси хC системы координат цифрового изображения;
- угол разворота оси х системы координат снимка относительно оси хC системы координат цифрового изображения;
kx, ky – коэффициенты деформации снимка по осям x и y.
Если калиброванные расстояния между координатными метками lx, ly не известны, то для определения координат точек в системе координат снимка используют формулы:
 . (1.15)
. (1.15)
Значения параметров j, a0, b0, kx, ky определяют по измеренным значениям координат координатных меток в системе координат цифрового изображения системы.
Значение угла определяют по формуле:
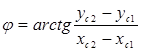 , (1.16)
, (1.16)
в которой xc1, yc1 и xc2, yc2 – координаты 1 и 2 координатных меток в системе координат цифрового изображения.
Значения коэффициентов kx, ky определяют по формулам:
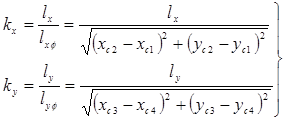 , (1.17)
, (1.17)
в которых:
lx, ly – калиброванные значения расстояний между координатными метками;
xci, yci – координаты координатных меток в системе координат цифрового изображения.
Параметры a0, b0 определяют, как координаты xc, yc точки пересечения прямых линий, проведенных через координатные метки 1-2 и 3-4 по формулам:
 , (1.18)
, (1.18)
в которых:
 .
.
Для определения координат точек снимка в системе координат цифрового изображения по координатам этих точек в системе координат снимка используют формулы:
 , (1.19)
, (1.19)
в случае, если калиброванные расстояния lx, ly между координатными метками известны, и формулы:
 , (1.20)
, (1.20)
в случае если, калиброванные расстояния lx, ly не известны.
Необходимо заметить, что в связи с тем, что система координат цифрового изображения левая, в формулах 1.14 – 1.20 координата yc берется с обратным знаком.
Определение пиксельных координат точек изображения производят по формулам (1.13).
Дата добавления: 2015-09-07; просмотров: 2137;