Вплив кута α на значення доплерівської швидкості
У загальному випадку вектор швидкості руху спрямований під кутом α відносно датчика. Доплерівський зсув частоти визначається проекцією швидкості v на лінію, що сполучає відбивач з датчиком, тобто величиною v·cosα.
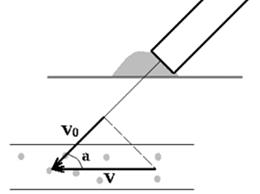
Рис. 8.2. Вектор швидкості руху спрямований під кутом α відносно датчика
Основне співвідношення, яке дозволяє за виміряним в приладі доплерівським зсувом частоти fd оцінювати швидкість руху v:

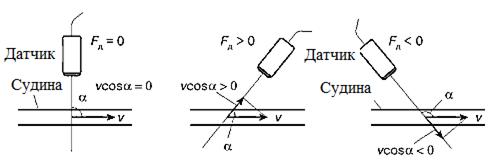
Рис. 8.3. Вплив кута α на значення доплерівської швидкості
У доплерівських режимах використовуються датчики з наступними частотами:
o 2 МГц - для дослідження судин мозку;
o 3 МГц - для дослідження плацентарного кровотоку;
o 4 або 5 МГц - для дослідження великих і глибоко розташованих судин;
o 8 або 10 МГц - для дослідження дрібних, неглибоко розташованих
периферичних судин.
Якщо використати значення швидкості v = 2 м/с, то для частоти випромінювання f0 = 8 МГц можна отримати (приймаючи, що с ≈ 1540 м/с, а для спрощення Cosα = 1) зсув частоти fd = 16 кГц. Для інших, менших значень швидкості доплерівський зсув частоти буде меншим. Отриманий результат цікавий тим, що має важливе практичне значення. Діапазон частот, які чує людське вухо, становить від 20 Гц до 20 кГц. Тому за допомогою акустичних систем доплерівський зсув частоти можна зробити чутним, що застосовується практично у всіх сучасних приладах з доплерівськими режимами роботи. Можливість чути доплерівські частоти окрім їх спостереження на екрані приладу є дуже корисною функцією для лікаря, так як людське вухо - чутливий і тонкий аналізатор частот.
Дата добавления: 2015-10-09; просмотров: 1595;