Угловая скорость и угловое ускорение
Рассмотрим твердое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R (рис.1.6). Ее положение через промежуток времени Δt зададим углом Δ  . Элементарные (бесконечно малые) углы поворота рассматривают как векторы.
. Элементарные (бесконечно малые) углы поворота рассматривают как векторы.
 Рассмотрим твердое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R (рис.1.6). Ее положение через промежуток времени Δt зададим углом Δ . Элементарные (бесконечно малые) углы поворота рассматривают как векторы. Модуль вектора
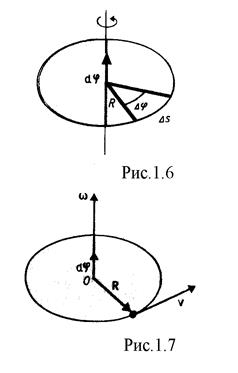
Рассмотрим твердое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R (рис.1.6). Ее положение через промежуток времени Δt зададим углом Δ . Элементарные (бесконечно малые) углы поворота рассматривают как векторы. Модуль вектора  равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т. е. подчиняется правилу правого винта (рис.1.6). Векторы, направления которых связываются с направлением вращения, называются псевдовекторами или аксиальными векторами. Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки оси вращения.
равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т. е. подчиняется правилу правого винта (рис.1.6). Векторы, направления которых связываются с направлением вращения, называются псевдовекторами или аксиальными векторами. Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки оси вращения.
Угловой скоростью называется векторная величина, равная первой  производной угла поворота тела по времени:
производной угла поворота тела по времени:
 .
.
Вектор  направлен вдоль оси вращения по правилу правого винта, т. е. так же, как и вектор
направлен вдоль оси вращения по правилу правого винта, т. е. так же, как и вектор  (рис.1.7). Размерность угловой скорости - радиан в секунду (рад/с).
(рис.1.7). Размерность угловой скорости - радиан в секунду (рад/с).
Линейная скорость точки (см. рис.1.6)
υ = ωR .
В векторном виде формулу для линейной скорости можно написать как векторное произведение:
 .
.
Если ω = const, то вращение равномерное и его можно характеризовать периодом вращения T- временем, за которое точка совершает один полный оборот, т. е. поворачивается на угол 2π. Так как промежутку времени Δt = T соответствует Δφ = 2π, то ω = 2π/T откуда
T = 2π/ω.
Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения:
n = 1/T = ω/(2π),
откуда ω = 2πn.
Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:
 .
.
Размерность углового ускорения - радиан за секунду в квадрате (рад/с2). При вращении тела вокруг неподвижной оси вектор углового ускорения направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор  сонаправлен вектору , при замедленном - противонаправлен ему.
сонаправлен вектору , при замедленном - противонаправлен ему.
Тангенциальная составляющая ускорения aτ =  ,
,  = ωR и
= ωR и
aτ = R  = Rε.
= Rε.
Нормальная составляющая ускорения
an =  = ω2R.
= ω2R.
Таким образом, связь между линейными (длина пути s, пройденного точкой по дуге окружности радиуса R, линейная скорость u, тангенциальное ускорение aτ, нормальное ускорение an)и угловыми величинами (угол поворота φ, угловая скорость ω, угловое ускорение ε) выражается следующими формулами:
s = Rφ, u= Rω, aτ = Rε, an = ω2R.
В случае равнопеременного движения точки по окружности (ε = const)
ω = ω0  εt, φ = ω0t εt2/2,
εt, φ = ω0t εt2/2,
где ω0- начальная угловая скорость.
ГЛАВА 2. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Дата добавления: 2015-10-05; просмотров: 836;