Организация движения электровозного транспорта
Служба внутришахтного транспорта (ВШТ) осуществляет оперативное руководство движением груженых, порожних и пассажирских составов, своевременную и бесперебойную подачу порожних вагонеток и вспомогательных грузов к рабочим участкам, надзор за исправностью подвижного состава, тяговой сети, рельсовых путей, проведение текущих ремонтов транспортного оборудования и откаточных выработок.
Работа электровозной откатки организуется в соответствии с технологическим паспортом рудной шахты, в который входят: характеристика подвижного состава; расчет электровозного транспорта и масса состава для каждого горизонта; расстановка вагонеток по шахте; схемы рельсовых путей откаточных горизонтов, а также у мест погрузки и разгрузки; схема тяговой сети с указанием мест расположения питающих пунктов; инструкционно-технологические карты, регламентирующие порядок движения составов по откаточным выработкам, маневровые операции на пунктах погрузки и разгрузки; техническое обслуживание электровозов и вагонеток и др.
На рудных шахтах с большим числом часто перемещаемых погрузочных пунктов применяют организацию движения с закреплением электровоза за определенным составом, при этом электровоз протягивает состав в процессе погрузки и разгрузки. При такой организации движения упрощается диспетчерское управление, однако использование электровозного парка недостаточное.
При небольшом числе относительно стабильных погрузочных пунктов электровоз не закрепляют за определенным составом. Электровозы перемещают составы только на перегонах, а вагонетки при погрузке и разгрузке перемещают различными маневровыми устройствами. Такой вид организации позволяет повысить эффективность использования парка электровозов, однако при этом усложняется диспетчерская служба и требуется дополнительное маневровое оборудование (толкатели, лебедки, маневровые электровозы).
Использование составов, включающих вагонетки с донной разгрузкой (см. рис. 9.3), образующие секционный поезд, позволяет организовать поточную технологию работы электровозного транспорта, при которой обеспечивается высокая производительность благодаря комплексной механизации всех взаимосвязанных между собой транспортных операций — погрузки, транспортирования и разгрузки. При поточной технологии откатки исключаются маневровые операции и ручной труд по сцепке и расцепке вагонеток, отсутствуют опрокидыватели на разгрузочных пунктах.
Для обеспечения плановой откатки и ее увязывания с другими транспортными установками и подъемом составляют графики движения поездов. При работе двух или трех электровозов в однопутной выработке организацию движения поездов осуществляют по графику встречного движения со скрещениями (рис. 10.11, а), эстафетному графику (рис. 10.11, б) или комбинированному.
Электровозы, работающие по графику встречного движения со скрещениями, встречаются на разминовках, что вызывает простои поездов вследствие неодинаковой длины перегонов.
При организации движения по эстафетному графику откаточный участок разделяют на ряд перегонов, число которых соответствует числу работающих электровозов. Откатку на каждом перегоне производят одним определенным электровозом с перецепкой составов на разминовках. Такой график применяют при длине откатки свыше 2 км.
При вычерчивании графика движения локомотивов по оси абсцисс откладывают время с 2-, 5- или 10-минутными интервалами, а по оси ординат — расстояние в метрах между начальным и конечным пунктами движения. Движение локомотива на графике изображается наклонными линиями, простои и маневры — горизонтальными линиями.
Движение 3 и более электровозов по однопутному участку с несколькими обменными и погрузочными пунктами осуществляют по комбинированному, со скрещениями или эстафетному графику с устройством путевых разминовок через каждые 300— 400 м и применением аппаратуры блокировки стрелок и сигналов, а также связи машиниста электровоза с диспетчерской службой.
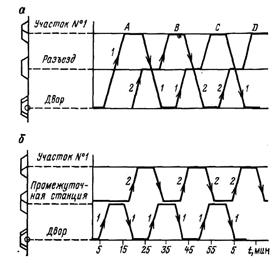
Рис. 10.11. Графики движения поездов: а — со скрещениями; б — эстафетный; 1 — электровоз № 1; 2 — электровоз № 2
При одновременной работе на участке 4 и более электровозов целесообразно переходить на двухпутное раздельное движение груженых и порожних составов.
Электровозы в течение смены работают либо по заранее составленному жесткому графику, либо маршрут их следования задается на каждый рейс диспетчером.
При грузообороте электровозного транспорта до 500— 1000 т/сут работа ВШТ контролируется горным диспетчером. При большем грузообороте, а также при одновременной работе более 8 электровозов на каждом добычном горизонте или 10 электровозов в смене вводится специальная диспетчерская служба движения.
В функции диспетчера входят: контроль и управление работой транспорта; обеспечение бесперебойного снабжения порожними вагонетками всех забоев и своевременного вывоза руды и породы; обеспечение своевременной перевозки людей к местам работы и обратно и др.
В камере диспетчера установлен пульт-табло с мнемосхемой откаточных путей, которые разделены на отдельные блок-участки, ограждаемые с двух сторон светофорами. Для управления электровозным транспортом используют телефонную связь, системы сигнализации, централизации и блокировки (СЦБ) стрелок и сигналов. Управление стрелочными переводами и светофорами осуществляется дистанционно диспетчером, который по сигналам на мнемосхеме определяет местонахождение поездов и положение стрелочных переводов и принимает решение о выборе маршрута. Диспетчер постоянно поддерживает связь с машинистами электровозов, осуществляемую по телефонному кабелю или контактному проводу.
Для оперативного управления работой электровозного транс порта на рудных шахтах применяется система сигнализации, централизации и блокировки (СЦБ) — комплекс технических средств, предназначенных для централизованного управления- движением поездов по откаточным выработкам в околоствольном дворе.
Устройства сигнализации (светофоры и связь) предназначены для обеспечения безопасного движения поездов и подачи сигналов машинистам электровозов, устройства централизации — для дистанционного управления сигналами и стрелочными переводами из диспетчерского пункта, устройства блокировки — для контроля за сигналами светофоров, положением стрелок, наличием подвижного состава на отдельных участках пути.
В зависимости от числа эксплуатируемых электровозов, расстояния транспортирования, производительности и степени сложности путевого развития применяют несколько систем СЦБ. Например, в пределах околоствольного двора и выработок откаточного горизонта используют систему, обеспечивающую централизованное диспетчерское управление светофорами и стрелочными переводами или автоматическое управление светофорами и стрелочными переводами отдельных блок-участков.
При работе более 3 электровозов на однопутных откаточных выработках с разминовками применяют аппаратуру автоматической двухсветовой сигнализации (АДС) и управления стрелочными переводами, а также управление одиночными стрелочнымипереводами машинистом из кабины движущегося электровоза. Аппаратура АДС обеспечивает автоматическое включение разрешающего (зеленого) света светофора при наличии запроса на свободный блок-участок, переключение зеленого света на красный при въезде на блок-участок идр.
Комплект аппаратуры СЦБ состоит из светофоров, путевых датчиков, приводов стрелочных переводов, централизованных аппаратов с релейными шкафами, реле, источников питания и др.
Светофоры, имеющие красный (запрещающий) и зеленый (разрешающий) сигналы, предназначены для обеспечения безопасности движения составов. По назначению светофоры разделяются на входные, выходные и проходные. Входные и выходные сигналы разрешают или запрещают вход или выход поезда на разминовку или с перегона в околоствольный двор. Проходные сигналы разрешают или запрещают движение поезда с одного участка на другой в пределах перегона или околоствольного двора. Светофоры располагают таким образом, чтобы их сигналы были видны машинисту локомотива на расстоянии не менее длины тормозного пути поезда.
Путевые датчики представляют собой приемные элементы, служат для связи подвижного состава с сигнальными и централизованными устройствами и автоматически регулируют движение локомотивов. В подземных условиях применяют механические, индуктивные, электроконтактные и другие датчики. Механический датчик выполняют в виде педали, при нажатии на которую колесом локомотива через рычажную систему замыкаются контакты электрической цепи сигнализации. Индуктивный датчик, представляющий собой катушку со стальным сердечником, устанавливают между рельсами. Принцип действия этого датчика основан на изменении магнитного поля при прохождении над ним локомотива. Контактный датчик выполнен в виде отрезка дополнительного контактного провода, при замыкании которого токоприемником с основным контактным проводом в схему СЦБ подается сигнал о прохождении электровоза.
В системах СЦБ используется аппаратура блокировки стрелок и сигналов АБСС-1М, состоящая из блока управления маршрутами, блока автоматического управления стрелками и бесконтактного преобразователя напряжения. Эта аппаратура обеспечивает автоматическое управление светофорами и приводами стрелочных переводов в зависимости от места нахождения поездов на путевых участках.
Для управления стрелочным переводом машинистом из кабины движущегося электровоза применяют комплекс аппаратуры НЭРПА-1, обеспечивающий перевод стрелки бесконтактным способом кнопкой местного управления, а также контроль положения и прижатия остряков стрелки. Комплекс включает в себя передатчик высокочастотных сигналов, приемник сигналов, пускатель ипривод стрелочного перевода.
В рудных шахтах на погрузочных и разгрузочных пунктах широко применяют систему дистанционного управления электровозом, при которой машинист покидает кабину и управляет движением состава и работой погрузочных и разгрузочных механизмов с переносного пульта управления. Дистанционное управление электровозом осуществляется с помощью высокочастотных сигналов (команд) по контактной сети. Участок контактного провода в местах погрузки и разгрузки изолируют от остальной сети. Команды на движение электровоза подаются контактором, соединяющим изолированный участок с контактной сетью. Аппаратура дистанционного управления рудничным контактным электровозом (АДУЭР) обеспечивает управление электровозом «Вперед» и «Назад», его затормаживание и включение звукового и светового предупредительных сигналов перед началом движения электровоза. Эта система позволяет повысить производительность труда процесса вывоза горной массы благодаря совмещению функций оператора погрузочной или: разгрузочной установки и машиниста электровоза.
На крупных зарубежных рудных шахтах, например «Кируна» (Швеция), внедрены автоматические системы управления (АСУ) подземным электровозным транспортом. Откатка руды, осуществляется в вагонетках с донной разгрузкой (см. рис. 9.3) по замкнутой схеме, благодаря чему достигаются более высокие скорости движения (до 25 км/ч) и увеличивается пропускная способность электровозного транспорта. Откатка производится контактными электровозами со сцепным весом 650 кН, составами по 16—18 вагонеток с донной разгрузкой (грузоподъемность одного состава 420—460 т).
АСУ состоит из подсистемы сдвоенных компьютеров, подсистемы передачи данных, системы автоматического управления поездом, дистанционного управления погрузкой, логического устройства с программным управлением для дробильного отделения.
Информация о занятости путей и положении стрелок и сигналов через систему передачи данных поступает на мнемосхему и систему компьютеров в центр управления электровозным транспортом. Роль передающей антенны выполняет петля из одножильного кабеля, проложенного вдоль пути над контактным: проводом. На электровозе установлена приемная антенна. Команда, принимаемая антенной, дешифрируется и поступает на управляющее устройство электровоза.
После ухода состава с места разгрузки АСУ выбирает в соответствии с планом очередности нужный пункт погрузки и оптимальный маршрут движения. Скорость электровоза задается через устройства автоматического управления поездами. Компьютерная системанепрерывно следит за движением поезда.
По прибытии поезда к месту погрузки на мнемосхеме появляется сигнал. Оператор приступает к дистанционному управлению погрузкой, наблюдая за процессом на телеэкране, передача изображений на которой осуществляется от телекамеры, установленной на погрузочном пункте. После загрузки состава по команде оператора компьютерная система направляет состав на соответствующий пункт разгрузки.
Автоматическое вождение поездов с помощью ЭВМ и промышленного телевидения позволяет повысить пропускную способность электровозного транспорта, сократить число подвижных составов и обслуживающего персонала, повысить безопасность труда.
Дата добавления: 2015-09-28; просмотров: 2552;