Пример 3.2
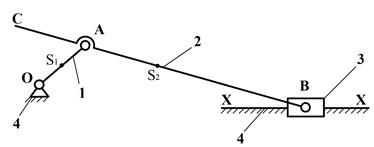
Кинематический расчёт кривошипно-ползунного механизма. Определение ускорений точек звеньев для заданного положения механизма.
Дано:
1.Угловая скорость кривошипа является постоянной и равна  ,
,  .
.
2.Размеры звеньев: ОА = 20мм, АВ = 76мм, АС = 26мм, AS2 = 25 мм.
Решение:
1.Определение ускорения точки А.
Так как угловая скорость  является постоянной, то
является постоянной, то  .
.
 .
.
Вектор ускорения  направлен параллельно кривошипу ОА от точки А к точке О.
направлен параллельно кривошипу ОА от точки А к точке О.
Выбираем масштаб плана ускорений  . Найдём отрезок, изображающий вектор ускорения на плане:
. Найдём отрезок, изображающий вектор ускорения на плане:  . Из полюса плана ускорений
. Из полюса плана ускорений  откладываем данный отрезок в направлении, параллельном АО.
откладываем данный отрезок в направлении, параллельном АО.
План ускорений 
2.Определение ускорения точки В.
Запишем векторное уравнение:  . Уравнение решаем графически.
. Уравнение решаем графически.
Вектор относительного ускорения  раскладываем на нормальную и касательную составляющие:
раскладываем на нормальную и касательную составляющие:  .
.
Нормальное относительное ускорение равно:

 .
.
Найдём отрезок, изображающий вектор ускорения  на плане:
на плане: 

Продолжаем строить план ускорений, используя правило сложения векторов. Вектор ускорения направлен параллельно АВ. Откладываем отрезок  из точки
из точки  плана ускорений в указанном направлении от точки В к точке А.
плана ускорений в указанном направлении от точки В к точке А.
Вектор ускорения  направлен перпендикулярно АВ. Проводим это направление из точки
направлен перпендикулярно АВ. Проводим это направление из точки  плана ускорений. Вектор ускорения
плана ускорений. Вектор ускорения  направлен параллельно оси x – x. Проводим это направление из полюса . Две прямые линии, проведённые из точек и в указанных направлениях, пересекаются в точке
направлен параллельно оси x – x. Проводим это направление из полюса . Две прямые линии, проведённые из точек и в указанных направлениях, пересекаются в точке  .
.
Найдем величины ускорений. Измеряя длины полученных отрезков и умножая их на масштаб  , получим:
, получим:
Дата добавления: 2015-08-21; просмотров: 727;