Строение групп Асcура
А).Последняя группа Асcура
Б).Предпоследняя группа Асcура
В).Начальный механизм
Структурная формула всего механизма
7.Класс всего механизма II, так как наивысший класс группы Ассура, входящей в данный механизм II.
ЛЕКЦИЯ 3
Краткое содержание
Определение скоростей и ускорений точек звеньев при поступательном, вращательном и плоскопараллельном движениях. Планы скоростей и ускорений. Принцип подобия в планах скоростейи ускорений. Примеры кинематического исследования механизмов.
Теоретические предпосылки определения скоростей и ускорений
Основные формулы для определения скоростей и ускорений точек звеньев механизмов приведены в таблице 3.1.
Планы скоростей и ускорений
Планом скоростей (ускорений) называется диаграмма, на которой от некоторого центра (полюса) в масштабе отложены векторы скоростей (ускорений) точек тела.
Рассмотрим тело, совершающее плоскопараллельное движение (рис.3.1).
Для плоскопараллельного движения скорости точек определяются по формулам:
 , ,
, ,  (3.1)
(3.1)
где  ,
,  ,
,  - абсолютные скорости точек А, В, С;
- абсолютные скорости точек А, В, С;
 ,
,  - относительные скорости.
- относительные скорости.
Необходимо найти относительные скорости , .
План скоростей получим, если в выбранном масштабе  (
(  ) отложим от полюса
) отложим от полюса  отрезки
отрезки  ,
,  и
и  , параллельные векторам скоростей
, параллельные векторам скоростей  , , . Отрезки находятся по формулам:
, , . Отрезки находятся по формулам:  ,
,  ,
,  .
.
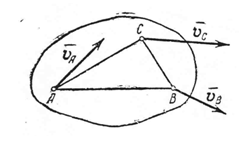 | 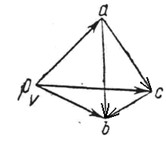 | ||
В результате построения плана скоростей получен треугольник авс (рис.3.2),который подобен треугольнику АВС. Найдем относительные скорости
и по формулам:
 ,
,  .
.
Рис.3.1 Рис.3.2
Сформулируем принцип подобия в плане скоростей:
В плане скоростей векторы относительных скоростей точек жесткого звена образуют фигуру, подобную звену, повернутую на угол 90° в сторону угловой скорости звена.
Дата добавления: 2015-08-21; просмотров: 892;