Цифровой (дискретный) ЛКР-регулятор
Кроме того, возможно определение коэффициентов  для цифрового ЛКР-регулятора, исходя из квадратичного критерия качества
для цифрового ЛКР-регулятора, исходя из квадратичного критерия качества
 , (2а)
, (2а)
где Q и R симметричные неотрицательно определенные весовые матрицы.
Матрица Q определяет стоимость штрафа, назначаемого за отклонение переменных состояния относительно их знчений в состоянии равновесия. Матрица R определяет стоимость штрафа, наначаемого за величину (уровень) управляющего воздействия. Эти матрицы устанавливаются пректировщиком системы. Цель управления принудить переменные состояния быть как можно ближе к нулю, в то время как штрафуется управляющее воздействие.
Итак, задача цифрового ЛКР управления заключается в том, чтобы найти такое управление u[i] (см. рис. ниже), которое минимизирует критерий качества  при условии, что объект управления описыватся уравнением
при условии, что объект управления описыватся уравнением

и задано начальное состояние  .
.
Оптимальное решение представляет собой обатную связь по состоянию
 ,
,
где векторный коэффициент обратной связи по состоянию имеет вид 
 .
.
В последнем выражении матрица P является решением линейного алгебраического разностного уравнения
 .
.
При этом замкнутая система независимо от выбора весовых матриц является устойчивой, т.е. все собственные значения матрицы замкнутой системы  имеют модули, меньшие единицы и значение оптиального критерия качества равно
имеют модули, меньшие единицы и значение оптиального критерия качества равно  . Итак, минимизирует
. Итак, минимизирует
 .
.
Пример. 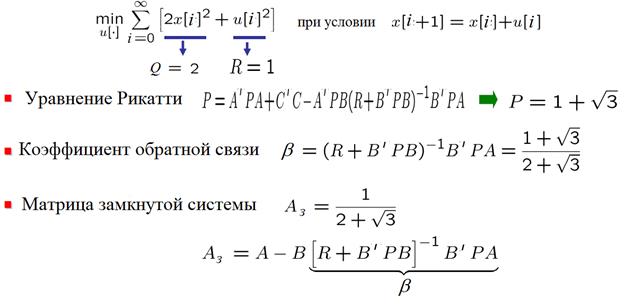
При объектах высокого порядка для определения P и  целесообразно применить команду dlqr системы MATLAB.
целесообразно применить команду dlqr системы MATLAB.
Дата добавления: 2015-08-14; просмотров: 886;