Проектирование систем реального времени. В настоящее время компьютеры применяются для управления широким спектром разнообразных систем, начиная от простых домашних устройств и заканчивая крупными
В настоящее время компьютеры применяются для управления широким спектром разнообразных систем, начиная от простых домашних устройств и заканчивая крупными промышленными комплексами. Эти компьютеры непосредственно взаимодействуют с аппаратными устройствами. Программное обеспечение таких систем (управляющий компьютер плюс управляемые объекты) представляет собой встроенную систему реального времени, задача которой – реагировать на события, генерируемые оборудованием, т.е. в ответ на эти события вырабатывать управляющие сигналы. Такое ПО встраивается в большие аппаратные системы и должно обеспечивать реакцию на события, происходящие в окружении системы, в режиме реального времени.
Системы реального времени отличаются от других типов программных систем. Их корректное функционирование зависит от способности системы реагировать на события через заданный (как правило, короткий) интервал времени. Вот как можно определить систему реального времени.
Система реального времени – это программная система, правильное функционирование которой зависит от результатов ее работы и от периода времени, в течение которого получен результат. "Мягкая" система реального времени – это система, в которой операции удаляются, если в течение определенного интервала времени не выдан результат. "Жесткая" система реального времени – это система, операции которой становятся некорректными, т.е. вырабатывается сигнал об ошибке, если в течение определенного интервала времени результат не выдан.
Систему реального времени можно рассматривать как систему "стимул-отклик". При получении определенного входного стимула (входного сигнала) система генерирует связанный с ним отклик (ответное действие или ответный сигнал). Следовательно, поведение системы реального времени можно определить с помощью списка входных сигналов, получаемых системой, связанных с ними ответных сигналов (откликов) и интервала времени, в течение которого система должна отреагировать на входной сигнал.
Входные сигналы делятся на два класса.
1. Периодические сигналы, происходят через предопределенные интервалы времени. Например, система проверяет датчик каждые 50 миллисекунд, и предпринимает действия (реагирует) в зависимости от значений, полученных от датчика (стимула).
2. Апериодические сигналы происходят нерегулярно. Обычно они "сообщают о себе" посредством механизма прерываний. Примером апериодического сигнала может быть прерывание, которое вырабатывается по завершении передачи вход/выход и размещения данных в буфере обмена.
В системах реального времени периодические входные сигналы обычно генерируются сенсорами (датчиками), взаимодействующими с системой. Они предоставляют информацию о состоянии внешнего окружения системы. Системные отклики (ответные сигналы) направляются группе исполнительных механизмов, управляющих аппаратными устройствами, которые затем воздействуют на окружение системы. Апериодические входные сигналы могут генерироваться и сенсорами, и исполнительными механизмами. Как правило, апериодические сигналы означают исключительные ситуации, например ошибки в работе аппаратуры. На рис. 11.1 показана модель "сенсор-система-исполнительный механизм" для встроенной системы реального времени.

Рис. 11.1. Общая модель системы реального времени
Системы реального времени должны реагировать на входные сигналы, происходящие в разные моменты времени. Следовательно, архитектуру такой системы необходимо организовать так, чтобы управление переходило к соответствующему обработчику как можно быстрее после получения входного сигнала. В последовательных программах такой механизм передачи управления невозможен. Поэтому обычно системы реального времени проектируют как множество параллельных взаимодействующих процессов. Часть системы - управляющая программа, часто называемая диспетчером, - управляет всеми процессами.
Большинство моделей "стимул-отклик" систем реального времени сводятся к обобщенной архитектурной модели, состоящей из трех типов процессов (рис. 11.2). Для каждого типа сенсора имеется процесс управления сенсором; вычислительный процесс определяет необходимый ответный сигнал на полученный системой входной сигнал; процессы управления исполнительными механизмами управляют действиями этих механизмов. Такая модель позволяет быстро собрать данные со всех имеющихся сенсоров (до того, как произойдет следующий ввод данных), обработать их и получить ответный сигнал от соответствующего исполнительного механизма.
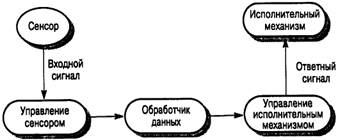
Рис. 11.2. Процессы управления сенсорами и исполнительными механизмами
Дата добавления: 2015-08-14; просмотров: 1379;