Камеральная обработка теодолитного хода
После выполнения полевых работ производится камеральная обработка результатов измерений. Камеральная обработка начинается с тщательной проверки всех записей и вычислений в полевых журналах. По измеренным значениям горизонтальных углов и горизонтальным проложениям производится вычисление координат точек теодолитного хода, путём решения прямой геодезической задачи. По вычисленным координатам строится план теодолитного хода, на котором выполняется плановая привязка здания, путём решения обратной геодезической задачи.
Вычислительная обработка теодолитного хода ведётся по этапам:
1. Контроль угловых измерений.
2. Уравнивание углов.
3. Контроль линейных измерений.
4. Уравнивание приращений координат.
5. Вычисление координат точек.
I этап - Контроль угловых измерений
1. Вычисляется сумма измеренных углов в полигоне – Σβизм.
2. Вычисляется теоретическая сумма углов в замкнутом полигоне
Σβтеор. = 180º · (n – 2),где
n – число углов в полигоне.
3. Вычисляется угловая невязка в полигоне – ƒβ, которая получается в результате погрешности при измерении горизонтальных углов
ƒβ = Σβизм. – Σβтеор.
4. Вычисляется допустимая угловая невязка
ƒβ доп. =  2 t
2 t  , где
, где
t – точность теодолита
n – число углов в полигоне.
II этап- Уравнивание углов
5. Если ƒβ  ƒβ доп., то её распределяют с обратным знаком на все углы поровну
ƒβ доп., то её распределяют с обратным знаком на все углы поровну
δβ = 
6. Вычисляются исправленные значения углов с учётом поправок
β = βизм. δ
Сумма исправленных углов должна равняться теоретической сумме
Σβ = Σβтеор.
7. По исходному дирекционному углу и исправленным значениям углов вычисляются дирекционные углы последующих сторон
αn = αn-1 + 180º - βn
контролем вычислений является получение исходного дирекционного угла.
8. По вычисленным дирекционным углам, определяются румбы и их названия, используя формулы зависимости между дирекционными углами и румбами.
III этап- Контроль линейных измерений
9. Вычисляется периметр теодолитного хода – Р.
10. По румбам и горизонтальным проложениям сторон полигона вычисляются приращения координат
 Х = d · cos r
Х = d · cos r
У = d · sin r
Знаки приращений координат зависят от направления линий, т.е. от названия румбов линий.
11. Вычисляются невязки в приращениях координат
ƒХ = Σ  Х
Х
ƒУ = Σ У
12. Вычисляется абсолютная линейная невязка
ƒабс. = 
13. Вычисляется относительная линейная невязка
ƒотн. = 
14. Полученную относительную невязку сравнивают с допустимой
ƒдоп. = 
если ƒотн. ƒдоп., то вычисленные невязки в приращениях координат распределяются с обратным знаком пропорционально длинам сторон.
IV этап- Уравнивание приращений координат
15. Вычисляются поправки в приращения координат
δХ =  · d
· d
δУ =  · d
· d
16. Вычисляются исправленные приращения координат
 испр. = δ
испр. = δ
 испр. = δ
испр. = δ
17. Вычисляется сумма исправленных приращений
Σ испр. = 0
Σ испр. = 0
V этап- Вычисление координат точек
18. Вычисляются координаты точек теодолитного хода по исходным координатам точки 1 и исправленным приращениям координат, путём решения прямой геодезической задачи.
Хn = Хn-1 Х
Уn = Уn-1 У
Все вычисленные значения заносятся в ведомость вычисления координат (табл.7).
После вычислений строят план теодолитного хода:
1. На лист бумаги наносится координатная сетка в тонких линиях со сторонами 10х10 см.
2. В соответствии с выбранным масштабом производится оцифровка сетки по осям Х и У.
3. По вычисленным координатам Х и У все точки наносятся на план и подписываются.
4. Полученные точки соединяются прямыми линиями.
5. Каждая сторона подписывается: числитель – румб и его название, знаменатель – горизонтальное проложение.
6. План теодолитного хода оформляется в соответствии с условными знаками (рис.52).
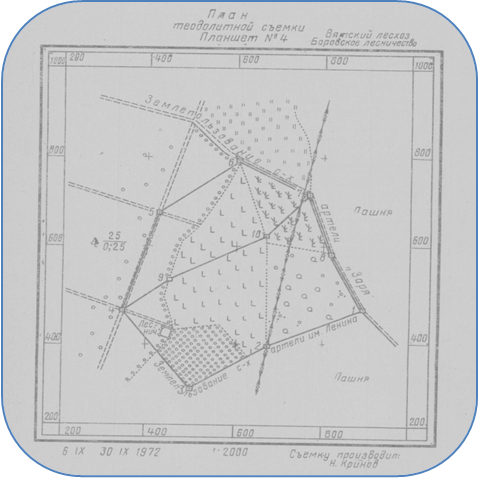
Рис. 52 План теодолитного хода
Дата добавления: 2015-08-11; просмотров: 9371;