Погрешности измерений вертикали.
Рассмотрим основные виды погрешностей биоИК в определении истинной вертикали и какие искажения восприятия визуальной информации возникают вследствие этого.
Отолитовые датчики по принципу действия аналогичны акселерометрам и в качестве вертикали выдают направление вектора результирующего ускорения активных сил  , которое определяется выражением:
, которое определяется выражением:
 ,
,
где  – составляющая вектора ускорения движения центра масс тела под действием активных сил, совпадающая по направлению с истинной вертикалью;
– составляющая вектора ускорения движения центра масс тела под действием активных сил, совпадающая по направлению с истинной вертикалью;  – горизонтальная составляющая вектора ускорения от активных сил;
– горизонтальная составляющая вектора ускорения от активных сил;  – вектор углового ускорения движения инерционных пластин отолитовых датчиков относительно центра масс тела человека:
– вектор углового ускорения движения инерционных пластин отолитовых датчиков относительно центра масс тела человека:  – векторы гравитационного ускорения в центре масс тела человека и в месте расположения его отолитовых датчиков.
– векторы гравитационного ускорения в центре масс тела человека и в месте расположения его отолитовых датчиков.
В обычных условиях жизнедеятельности человека горизонтальные ускорения , возникающие при его движениях, а также относительное ускорение , обусловленное вращением его головы вокруг центра масс, носят колебательный характер, невелики по амплитуде и действуют кратковременно. Поэтому усредненный результирующий вектор  совпадает по направлению с истинной вертикалью места и воспринимается человеком как направление "вверх".
совпадает по направлению с истинной вертикалью места и воспринимается человеком как направление "вверх".
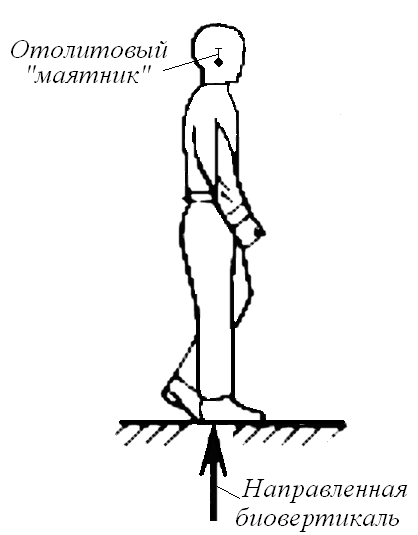
Рис. 36. Направление биовертикали в обычных земных условиях
Движение с большими горизонтальными ускорениями. В этом случае направление результирующего ускорения, а значит и биологической вертикали, значительно отклоняется от истинной вертикали, поэтому видимая человеком картина будет ориентироваться в повернутой системе координат. Особенно ярко это явление проявляется в условиях полета.
При вираже самолета возникают большие центростремительные силы, которые, суммируясь с подъемной силой самолета, отклоняют направление результирующего вектора активных сил от истинной вертикали. Человек, сидящий в самолете, видит горизонт наклоненным.
Во время разгона или торможения самолета биологический горизонт опускается вниз или поднимается вверх в зависимости от направления силы двигателей. Отклонение биологической вертикали от истинного направления приводит к появлению ошибочной визуальной оценки угла тангажа самолета.
При управлении и стыковке космических кораблей реверс направления силы тяги двигателей вызывает у космонавта ощущение переворачивания то вверх, то вниз головой, что существенно усложняет процесс визуальной стыковки космических кораблей.
а) б) в)
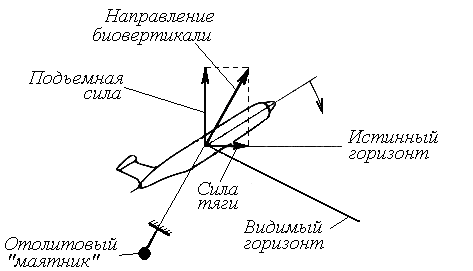
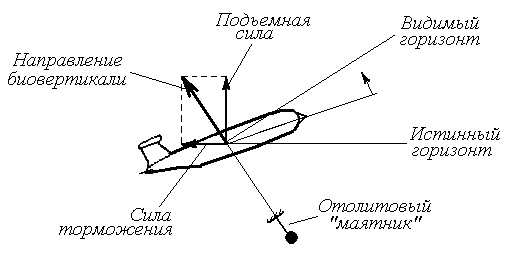
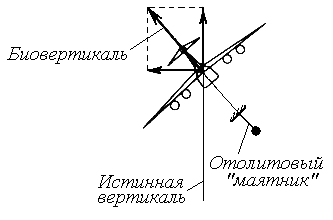
Рис. 37. Движения самолета, вызывающие пространственные иллюзии
а) взлет; б) посадка; в) вираж.
Статическое состояние в условиях невесомости. При отсутствии линейного и углового ускорений сил отолитовые датчики измеряют только градиент поля тяготения. При этом центр масс тела человека расположен на меньшем расстоянии от центра Земли, чем его отолитовые органы. При такой ориентации тела человека относительно Земли его центр масс движется в сторону Земли с ускорением, большим, чем ускорение отолитовых датчиков. Наличие упругой связи между отолитовыми пластинами и головой человека обуславливает появление сил упругости, которые заставляют их двигаться вместе с центром масс человека. Эти силы являются активными, отолитовые датчики их измеряют и выдают в биоИК за направление вертикали. Вследствие этого человек в невесомости воспринимает себя перевернутым вверх ногами.
а) б) в)
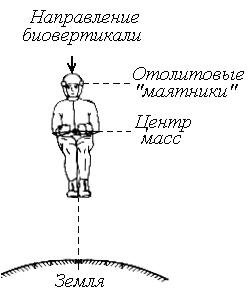
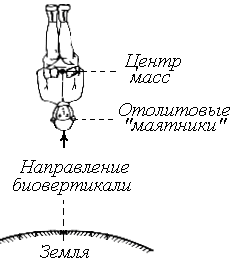
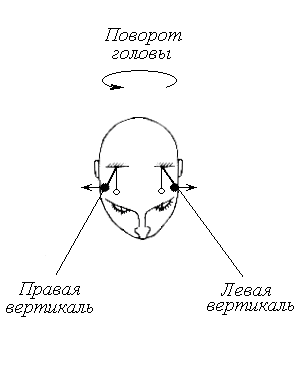
Рис. 38. Пространственные иллюзии в условиях невесомости
Если тело человека в невесомости ориентировано головой в сторону Земли, то в этом случае гравитационного поле заставляет инерционные пластины отолитовых датчиков двигаться с ускорением большим, чем центр масс тела человека, а силы упругости будут тормозить их движение. Вследствие этого человек и в этом положении будет воспринимать себя перевернутым вниз головой.
Силы упругости весьма незначительны по величине и соответствуют градиенту силы поля тяготения Земли на расстоянии около 0,5 метра. Однако чувствительность отолитовых датчиков достаточна для их измерения в условиях невесомости. Это подтверждает практика космических полетов: в условиях невесомости у человека нарушается зрительное восприятие окружающего пространства, в том числе происходит переворачивание видимой картины, что существенно нарушает его работоспособность.
Относительное вращение в условиях невесомости. Полагаем, что человек в невесомости поворачивает голову вокруг вертикальной оси с некоторым ускорением. В этом случае отолитовые датчики вырабатывают разные направления вертикали. Рассогласование между направлениями правой и левой биологических вертикалей вызывает раздвоение изображения, моделируемого в головном мозге человека, что подтверждается практикой космических полетов.
Реакция человека на погрешности измерения направления вертикали определяется в первую очередь тем, может ли организм обнаружить эти погрешности и если да, то способен ли он компенсировать их влияние.
В случае движения с большими горизонтальными ускорениями оба отолитовых органа воспроизводят вертикали, одинаковые по направлению. Кабина объекта, внутри которого находится человек, движется вместе с ним с таким же ускорением, поэтому внутрикабинное пространство воспринимается “правильно”: вверх в направлении результирующей активных сил, действующих на человека, а видимая за бортом картина – наклоненной относительно вертикали. В этом случае человеку трудно достоверно без помощи приборов оценить угловую ориентацию объекта в пространстве. Именно этим объясняется тот факт, что режимы разгона, торможения и маневрирования являются наиболее сложными для ручного управления. Однако, как показывает летная практика, функциональных нарушений в биоИК у человека при этом не возникает.
В условиях невесомости силы упругости, действующие на отолитовые органы, не связаны с объектом, в котором находится человек. Поэтому внутри космического корабля он воспринимает себя перевернутым "вниз головой". Животные, вплоть до человекообразных обезьян, оказавшись в такой обстановке, теряют пространственную ориентацию, что проявляется в неспособности совершать управляемые движения. Человек, вооруженный соответствующими знаниями, начинает активную деятельность: пытается двигаться, ощупывать окружающие его предметы руками и, главное, сопровождать свои движения взглядом. Такие действия обеспечивают его биоИК информацией о действительном положении головы и тела относительно космического корабля, что позволяет скомпенсировать погрешности пространственной ориентации.
Более сложная ситуация возникает в случае, когда левый и правый отолитовые датчики моделируют разные направления вертикали. Если такая ситуация возникнет вследствие отказа одного из органов чувств (левого или правого), то система контроля выявит это и заблокирует сигналы, поступающие от него. При этом биоИК продолжит работу с использованием второго исправного датчика. В рассматриваемом случае оба отолитовых органа функционируют нормально, и система контроля это подтверждает. В то же время направления моделируемых ими вертикалей не совпадают друг с другом, и у биоИК не хватает информации для выбора истинной вертикали из двух, что приводит к полному нарушению его работоспособности. Это сопровождается болезненными процессами, называемыми “явлениями укачивания”, которые предупреждают организм о случившемся отказе и готовят его к “консервации”.
Благодаря способности организма адаптироваться и обучаться в результате многократных тренировок в условиях невесомости в биоИК вырабатываются новые способы пространственной ориентации, усиливается стабилизация головы для уменьшения влияние ускорений, а вместо маятниковой вертикали используется зрительная. Недостатком ориентации по визуальной вертикали является прерывистый характер работы зрения: при моргании, переводе взгляда с ближнего обзора на дальний и, наоборот, при изменении освещенности, в темноте – визуальная вертикаль не измеряется, и в эти периоды времени работа биоИК значительно ухудшается.
Таким образом, взаимодействие вестибулярного и зрительного анализаторов в определенных условиях является причиной возникновения у человека искаженного восприятия окружающего пространства и собственного положения.
Дата добавления: 2015-08-11; просмотров: 1167;