Практический пример программирования средствами Ultralogik
Рассмотрим пример проекта автоматизированной системы подогрева воды (рис.42).
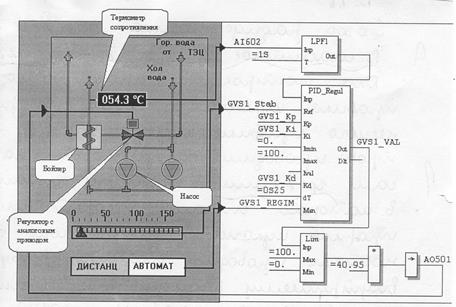
Рис. 42. Пример автоматизированной системы подогрева воды, запрограммированной средствами ULTRALOGIK
Холодная вода нагревается в теплообменнике ТО. Давление холодной воды обеспечивает двигатель M1, двигатель М2 является резервным. Количество горячей воды от ТЭЦ в теплообменнике регулируется аналоговым регулятором РТ с приводом постоянного тока. Температура нагреваемой воды зависит от положения регулятора РТ.
Проект содержит две программы Моtors_Ctrl- управление насосами (рис.43) и Reg_Ctrl- управление регулятором температуры (рис.44).Проект имеет следующие переменные и константы.
Входные переменные:
- Alarm_M1 - сигнал неисправности двигателя Ml;
- Alarm_M2 - сигнал неисправности двигателя М2;
- T_wat - температура воды в контуре горячего водоснабжения.
Выходные переменные:
- Start_М1 - пуск двигателя Ml;
- Start_M2 - пуск двигателя М2;
- Ctrl - управление приводом РТ.
Глобальные переменные:
- T_stab - температура стабилизации (задатчик);
- Start - пуск одного из двигателей.
Константы, определяющие параметры ПИД-регулятора:
- Кп - коэффициент пропорционального управления;
- Кдиф - коэффициент дифференциального управления;
- Кинт - коэффициент интегрального управления.
Переменные Start и T_stab являются сетевыми, и их значение устанавливает система визуализации верхнего уровня. При получении сигнала Start и отсутствии сигнала Alarm_Ml включается двигатель Ml. В том случае, если двигатель Ml неисправен (А1агт_М1=Тruе), включается двигатель М2. Функциональный блок Aver вычисляет среднее значение измеренной температуры воды. Число замеров задается параметрически (в приведенном примере 1000). Вычисленное значение температуры подается на вход ПИД-регулятора. На другой вход регулятора подается значение уставки (в данном примере T_stab). Величина рассогласования между заданным и истинным значением параметра является аргументом функции регулирования. Коэффициенты регулирования задаются параметрически. Выходной сигнал регулятора ограничивается разрешенными пределами цифро-аналогового преобразователя и непосредственно управляет приводом постоянного тока. Все приведенные функции данного проекта реализуются с помощью модуля 5710 Analog Input Card фирмы Octagon Systems.
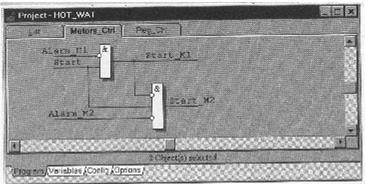
Рис. 43. Программа управления насосами в системе подогрева воды
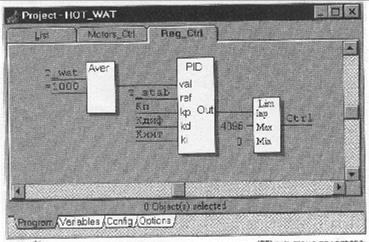
Рис. 44. Программа управления регулятором температуры (РГ) в системе подогрева воды
Дата добавления: 2015-07-18; просмотров: 1149;