Микропроцессорные системы управления
Современная АСУТП (автоматизированная система управления технологическим процессом) представляет собой многоуровневую человеко-машинную систему управления. Создание АСУ сложными технологическими процессами осуществляется с использованием автоматизированных информационных систем сбора данных и вычислительных комплексов, которые постоянно совершенствуются по мере эволюции технических средств и программного обеспечения.
Непрерывную во времени картину развития АСУТП можно разделить на три этапа, которые обусловлены появлением качественно новых научных идей и технических средств. В ходе истории меняется характер объектов и методов управления, средств автоматизации и других компонентов, составляющих содержание современной системы управления.
Первый этап отражает внедрение систем автоматического регулирования (САР). Объектами управления на этом этапе являются отдельные параметры, установки, агрегаты. Решение задач стабилизации, программного управления, слежения переходит от человека к САР. У человека появляются функции расчета задания и параметров настройки регуляторов.
Второй этап - автоматизация технологических процессов. Объектом управления становится рассредоточенная в пространстве система. С помощью систем автоматического управления (САУ) реализуются все более сложные законы управления, решаются задачи оптимального и адаптивного управления, проводится идентификация объекта и состояний системы. Характерной особенностью этого этапа является внедрение систем телемеханики в управление технологическими процессами. Человек все больше отдаляется от объекта управления, между объектом и диспетчером выстраивается целый ряд измерительных систем, исполнительных механизмов, средств телемеханики, мнемосхем и других средств отображения информации (СОИ).
Третий этап - автоматизированные системы управления технологическими процессами характеризуется внедрением в управление технологическими процессами вычислительной техники. Вначале применение микропроцессоров, использование на отдельных фазах управления вычислительных систем, затем активное развитие человеко-машинных систем управления, инженерной психологии, методов и моделей исследования операций и, наконец, диспетчерское управление на основе использования автоматических информационных систем сбора данных и современных вычислительных комплексов.
От этапа к этапу менялись и функции человека (оператора/диспетчера), призванного обеспечить регламентное функционирование технологического процесса. Расширяется круг задач, решаемых на уровне управления, ограниченный прямой необходимостью управления технологическим процессом. Набор задач пополняется качественно новыми задачами, ранее имеющими вспомогательный характер или относящимися к другому уровню управления.
Диспетчер в многоуровневой автоматизированной системе управления технологическими процессами получает информацию с монитора ЭВМ или с электронной системы отображения информации и воздействует на объекты, находящиеся от него на значительном расстоянии, с помощью телекоммуникационных систем, контроллеров, интеллектуальных исполнительных механизмов.
Основным необходимым условием эффективной реализации диспетчерского управления, имеющего ярко выраженный динамический характер, становится работа с информацией, т. е. с процессами сбора, передачи, обработки, отображении, предоставления информации.
От диспетчера уже требуется не только профессиональное знание технологического процесса, основ управления им, но и опыт работы в информационных системах, умение принимать решение (в диалоге с ЭВМ) в нештатных и аварийных ситуациях и многое другое. Диспетчер становится главным действующим лицом в управлении технологическим процессом.
Говоря о диспетчерском управлении, нельзя не затронуть проблему технологического риска. Технологические процессы в энергетике, нефтегазовой и ряде других отраслей промышленности являются потенциально опасными и при возникновении аварий приводят к человеческим жертвам, а также к значительному материальному и экологическому ущербу.
Статистика говорит, что за тридцать лет число учтенных аварий удваивается примерно каждые десять лет. В основе любой аварии за исключением стихийных бедствий лежит ошибка человека.
В результате анализа большинства аварий и происшествий на всех видах транспорта, в промышленности и энергетике в 60-х годах ошибка человека была первоначальной причиной аварий лишь в 20% случаев, тогда как к концу 80-х доля "человеческого фактора" стала приближаться к 80%.
Одна из причин этой тенденции - старый традиционный подход к построению сложных систем управления, т. е. ориентация на применение не новейших технических и технологических достижений и недооценка необходимости построения микропроцессорных систем управления и эффективного человеко-машинного интерфейса, ориентированного на человека (диспетчера).
В дальнейшем будем рассматривать технологический (нижний) уровень АСУТП. Его еще называют микропроцессорной системой управления параметрами технологического процесса.
Под микропроцессорной системой управления (МПСУ) понимается комплекс аппаратурных и программных средств, который под воздействием оператора или автоматически управляет состоянием какого-либо объекта. Работа МПСУ при управлении реальными объектами связана, как правило, с необходимостью обмена информацией с большим числом внешних устройств, с решением многих задач в реальном масштабе времени при их относительной неизменности в течение всего времени эксплуатации, с большой продолжительностью непрерывной работы при сохранении устойчивости к отказам. Это приводит к некоторым особенностям архитектуры (структуры и системного программного обеспечения) МПСУ по сравнению с универсальными средствами вычислительной техники.
Из структурных особенностей МПСУ следует отметить:
1) развитую систему сопряжения с большим количеством внешних устройств (исполнительных устройств, датчиков информации);
2) использование различного рода каналов ввода-вывода и стандартного интерфейса;
3) развитую систему средств управления и отображения информации;
4) развитую систему памяти (применение наряду с ОЗУ ПЗУ и ППЗУ большой информационной емкости и быстродействия);
5) наличие системы аппаратурного контроля;
6) наличие счетчиков реального времени.
Системное программное обеспечение МПСУ должно быть ориентировано на выполнение вычислений в реальном масштабе времени, обеспечение обмена информацией во время решения задач, большой объем используемых данных и прикладных программ, большое количество операций логического преобразования, поиска и упорядочения информации, использование программно-логических способов защиты от всевозможных сбоев и отказов.
Структура МПСУ, как правило, представляет собой системно-организованные контроллеры и модули, осуществляющие сбор данных и автоматическое управление параметрами технологического процесса.
В рассматриваемом курсе МПСУ строится на основе контроллеров серий ADAM-4000, ADAM-5000.
Контроллеры серии ADAM-4000 предназначены для построения локальных систем сбора данных и управления, например, таких как показано на рис.1.

Рис.1. Автоматизированная система контроля параметров водонагревательного котла КВГМ-180
Они представляют собой компактные и интеллектуальные устройства обработки сигналов датчиков, формирования сигналов управления исполнительными органами, специально разработанные для применения в промышленности. Наличие встроенных микропроцессов позволяет им осуществлять нормализацию сигналов, операции аналогового и дискретного ввода/вывода, отображение данных и их передачу (или прием) по интерфейсу RS-485. Все модули имеют гальваническую развязку по цепям питания и интерфейса RS-485, программную установку параметров, командный протокол ASCII.
Контроллеры серии ADAM-5000 предназначены для построения территориально-распределительных систем сбора данных и управления. Они обеспечивают выполнение следующих функций:
- аналоговый ввод-вывод;
- дискретный ввод-вывод;
- прием команд от удаленной вычислительной системы и передачу в ее адрес преобразованных данных с использованием интерфейсы RS-485.
ADAM-5000 состоит из трех модульных компонентов: процессора, кросс-платы, модулей ввода-вывода. Каждое устройство может содержать до 4 модулей (64 каналов ввода-вывода). Имеется возможность гибкого конфигурирования системы и входящих в ее состав устройств в зависимости от количества и вида контролируемых параметров, а также от расположения контролируемых объектов. Устройства серии ADAM-5000 могут объединяться в многочисленную сеть на базе интерфейса RS-485, управляемую центральным компьютером.
Представителем ADAM-5000 является микроконтроллер ADAM-5510.
 IBM PС совместимый программируемый микроконтроллер (рис.2) ADAM-5510 используется в локальных и распределительных системах автоматизации в качестве автономного контроллера. Он обеспечивает прием и выдачу аналоговых и дискретных сигналов, первичное преобразование сигналов по запрограммированным пользователем алгоритмам и обмен информацией по последовательным каналам связи на базе интерфейсов RS-485 и RS-232.
IBM PС совместимый программируемый микроконтроллер (рис.2) ADAM-5510 используется в локальных и распределительных системах автоматизации в качестве автономного контроллера. Он обеспечивает прием и выдачу аналоговых и дискретных сигналов, первичное преобразование сигналов по запрограммированным пользователем алгоритмам и обмен информацией по последовательным каналам связи на базе интерфейсов RS-485 и RS-232.
Контроллер имеет открытую архитектуру и может программироваться как с помощью традиционных языков программирования (С, ассемблер), так и с помощью языков логического программирования в соответствии со стандартом МЭК-61131 (в настоящем курсе поддержка ADAM-5510 реализована в системе программирования Ultralogik).
Рис.2
Пример МПСУ в виде автоматизированной системы
управления паровым котлом
Назначение и конфигурация системы
Система должна выполнять следующие основные технологические задачи:
- оперативный контроль (мониторинг) технологического процесса;
- автоматическое регулирование технологических параметров;
- диагностику состояния элементов поверхностей нагрева.
Система состоит из рабочих станций различного функционального назначения (рис. 3), которые объединены между собой локальной вычислительной сетью ТЭЦ. Каждая из станций передает информацию об изменениях технологических параметров с дискретностью 0,1 с остальным абонентам системы. Реализован обмен информацией с вычислительной сетью АСУ ТЭЦ.
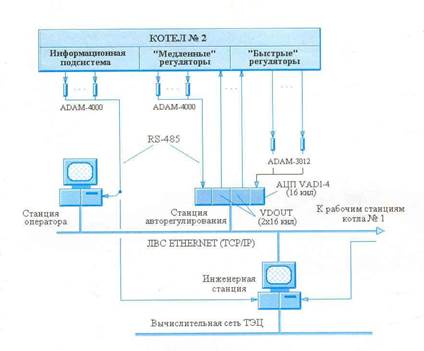 |
Рис.3. Структурная схема МПСУ парового котла
Технические средства системы размещены на рабочих станциях.
1. Станция оператора (1 шт. на котел) обеспечивает ввод сигналов от датчиков информационной системы котла, мониторинг технологического процесса и интерфейс «оператор-система». Она базируется на промышленном компьютере. Используется операционная система Windows, языки программирования Borland C++5.0 и Delphi 2.0.
2. Станция авторегулирования (1 шт. на котел) осуществляет цифровое автоматическое регулирование основных технологических параметров и процессов (давления пара, расходов газа и мазута, питания котла водой, температуры перегрева пара и т.п.).
Используется операционная система реального времени OS-9 (язык программирования Ultra C).
3. Инженерная рабочая станция (1 шт. на 2 котла) представляет собой полномасштабную рабочую станцию (ПЭВМ Pentium 100/16/1000), позволяющую в полном объеме выполнять все функции старшего оператора. Помимо этого, она осуществляет ведение системных и технологических протоколов, архивирование истории процесса, обмен информацией с АСУ ТЭЦ, санкционированную модификацию баз данных (уставок, параметров настройки регуляторов, конфигураций, паролей и т. п.) и мнемосхем.
Дата добавления: 2015-07-18; просмотров: 8629;