Общие сведения. Принцип работы электромагнитных исполнительных устройств основан на способности электромагнитного поля создавать в ферромагнетиках механические усилия
Принцип работы электромагнитных исполнительных устройств основан на способности электромагнитного поля создавать в ферромагнетиках механические усилия притягивания или отталкивания.
В системах автоматики широко применяют в качестве исполнительных механизмов (ИМ) электромагнитные приводы, преобразующие энергию электрического тока в поступательное движение рабочего органа. Их еще называет соленоидными. В зависимости от типа, конструктивного исполнения и условий применения выходной координатой электромагнитных ИМ могут быть:
- для ИМ с прямолинейным перемещением рабочего органа - перемещение, скорость и усилие;
- для ИМ с вращательным движением рабочего органа - угол поворота, частота вращения или развиваемый вращающий момент.
За управляющее воздействие на электромагнитные ИМ принимается электрический сигнал управления на намагничивающей обмотке, создающей электромагнитное поле и действующее через него на рабочий орган.
Ходовые электромагниты могут быть постоянного и переменного (однофазные и трехфазные) тока. Их основные характеристики - ход якоря, зависимость между перемещением якоря и тяговым усилием, зависимость между положением якоря (его перемещением) и расходом электроэнергии и время срабатывания. Эти характеристики зависят от формы магнитопровода, (см. рисунок 4.1), состоящего из ярма 1 и якоря 2 расположения, намагничивающих обмоток 3 и рода питающего тока (переменный или постоянный).
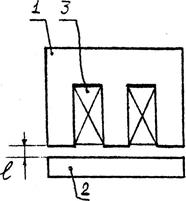
1 - ярмо; 2 - якорь; 3 - катушка; 1 - ход якоря
Рисунок 4.1 – Конструкция электромагнитного исполнительного механизма
В зависимости от хода якоря 1 (его максимального перемещения) различают короткоходовые (до 5 мм) и длинноходовые электромагниты (более 5 мм).
При выборе электромагнита необходимо учитывать следующие параметры:
- выбираемая конструкция должна отвечать длине хода, тяговой силе и заданной тяговой характеристике. Для больших тяговых сил и малой длины хода якоря используют короткоходовые, а для небольших тяговых сил и значительных ходов якоря - длинноходовые электромагниты. Для больших
перемещений якоря - электромагниты с замкнутым цилиндрическим магнитопроводом и постоянной тяговой силой;
- для быстродействующих систем необходимо применять электромагниты с шихтованным магнитопроводом, а для замедленных систем с нешихтованным магнитопроводом и поворотным якорем с массивной медной гильзой;
- число циклов срабатывания должно быть меньше допустимого для
данного ИМ;
- электромагниты переменного тока при одинаковых совершенных
работах потребляют электроэнергии больше, чем электромагниты постоянного тока;
Выбор электромагнита осуществляют по напряжению, току и потребляемой мощности. Средняя допустимая температура нагрева 85...90°С.
Электромагнитные ИМ отличаются простотой управления, малым весом и небольшой стоимостью. Однако для создания значительных усилий необходимо увеличивать рабочий ток катушки, в результате такие ИМ становятся громоздкими и невыгодными.
Тяговое усилие электромагнита пропорционально квадрату тока, протекающего по его обмотке:
F=f(I2).
Поэтому электромагнит может работать как при питании постоянным током так и при питании переменным током. Электромагниты переменного тока имеют худшие параметры, чем постоянного тока, поскольку при одинаковых усилиях развивают меньшее тяговое усилие, обладают меньшей чувствительностью и меньшей стабильностью. Они конструктивно сложнее и дороже из-за необходимости иметь шихтованный магнитопровод. Получили распространение электромагнитные ИМ серии ЭВ с поступательным характером движения, предназначенные для управления различными клапанами, вентилями, задвижками и золотниками (см. таблицу 4.1).
Таблица 4.1 – Характеристики электромагнитных ИМ.
| Тип ИМ | Тяговое усилие, Н | Потребляемая мощность, Вт | Ход штока, мм | Режим работы ПВ % |
| ЭВ-1 | 0,4 | |||
| ЭВ-2 | 0,4 | |||
| ЭВ-3 | 10,0 |
Дата добавления: 2015-07-14; просмотров: 1301;