Принципы, способы и классификация третичной обработки радиолокационной информации
Под третичной обработкой понимается процесс обработки сигналов или объединения первичной радиолокационной информации по пространству с целью улучшения характеристик радиолокационного наблюдения:
характеристик обнаружения;
характеристик распознавания;
точность характеристик измерения координат и параметров движения воздушного объекта.
При третичной обработке решаются следующие задачи: отождествление отметок от одного воздушного судна, полученных различными источниками информации; формирование измерений по данным от нескольких источников; построение траектории по объединенным данным.
Основой объединения сигналов является наличие рассеянного или излученного воздушным судном сигнала в пространстве, намного превосходящем по размерам ограниченное пространство однопозиционного радиолокационного наблюдения.
Если сигналы или первичную радиолокационную информацию, полученные в отдельных пунктах наблюдения, передать и сосредоточить в некотором центре обработки, то это объединение позволит использовать в интересах улучшения характеристик радиолокационного наблюдения не только дополнительную энергетику, но и корреляционные связи принятых сигналов, а также пространственное подобие первичной радиолокационной информации об одном объекте от разных источников, обусловленное фактическим наличием воздушного объекта в определенной точке пространства.
Энергетика принятого сигнала, которую можно использовать, пропорциональна суммарному раскрыву разреженной апертуры.
Корреляционные связи принятых в разных точках пространства сигналов определяются, во-первых, расстоянием между этими точками, а во-вторых, интервалом пространственной корреляции рассеянного или излученного целью сигнала. Последний определяется длиной волны λ, размером воздушного объекта (или раскрывом антенны излучающей системы) L и расстоянием от объекта до зоны анализа R:

Если расстояние между пунктами приема  меньше интервала пространственной корреляции сигнала
меньше интервала пространственной корреляции сигнала  , то принятые в этих пунктах сигналы являются коррелированными, причем коэффициент их корреляции можно считать равным
, то принятые в этих пунктах сигналы являются коррелированными, причем коэффициент их корреляции можно считать равным
В противном случае принятые сигналы следует считать некоррелированными. Корреляционные связи принятых сигналов могут быть использованы как для взаимной когерентной компенсации этих сигналов, так и для их когерентного сложения.
Пространственное подобиепервичной РЛИ об одной цели от разных источников (от разных пунктов приема и анализа), обусловленное фактическим наличием цели в определенной точке пространства, может быть использовано для отождествления РЛИ, полученной от разных источников, т. е. для закрепления сведений, полученных от разных источников, за одной определенной целью.
Техническим средством третичной обработки является многопозиционная радиолокационная система(МП РЛС). Под МП РЛС понимается радиолокационная система, которая включает несколько разнесенных в пространстве передающих, приемных или приемопередающих позиций и в которой производится совместная обработка получаемых с помощью этих позиций сигналов или информации о наблюдаемых объектах (целях). Центр или пункт совместной обработки может быть расположен на одной из позиций МП РЛС и должен быть связан линиями связи со всеми позициями. Именно благодаря совместной обработке сигналов или информации достигаются основные преимущества МП РЛС.
Главным и наиболее существенным, с точки зрения структуры и характеристик МП РЛС, классификационным признаком когерентной обработки, определяющим фактически способ пространственного объединения сигналов и первичной РЛИ, является степень пространственной когерентностиМП РЛС. Под пространственной когерентностью МП РЛС понимается способность использовать информацию, содержащуюся во взаимных фазовых соотношениях сигналов в разнесенных позициях. Следует различать пространственную когерентность МП РЛС и пространственную когерентность сигналов на входах приемных позиций МП РЛС. Последняя, как известно, зависит от размеров баз между позициями, длины волны, размеров цели, а также неоднородностей среды распространения, в то время как пространственная когерентность МП РЛС характеризует, no-существу, технические возможности аппаратуры. В связи с этим можно выделить три способа пространственного объединения сигналов и первичной РЛИ:
а) способ пространственно-когерентного объединения сигналов с привязкой позиций по времени, частоте и фазе принятых СВЧ-колебаний;
б) способ частичного или неполного пространственно-когерентного объединения сигналов с привязкой позиций по времени и частоте;
в) способ пространственно-некогерентного объединения сигналов и первичной РЛИ с привязкой позиций только по времени.
В пространственно-когерентных МП РЛСможно в принципе наиболее полно использовать информацию, содержащуюся в пространственной структуре электромагнитного поля, рассеянного или излученного целью, в том числе и в соотношении начальных фаз сигналов на входах разнесенных позиций В таких МП РЛС взаимные фазовые сдвиги сигналов в трактах разнесенных позиций и линиях связи известны и сохраняются практически неизменными на интервале времени, намного превышающем время наблюдения сигнала (например, в течение нескольких часов). В МП РЛС с продолжительной пространственной когерентностью необходима взаимная привязка разнесенных позиций не только по времени и частоте (опорным частотам передатчиков и гетеродинов приемников), но и по начальным высоко частотным фазам. С помощью какого-либо опорного сигнала (от радиоастрономического источника, «точечного» отражателя и др.) взаимные фазовые сдвиги могут периодически измеряться и корректироваться (юстироваться) или просто учитываться при обработке. Совокупность разнесенных позиций пространственно-когерентной МП РЛС можно рассматривать как единую разреженную антенную решетку, поэтому для получения приемлемой «диаграммы пространственной избирательности» требуется много позиции.
В пространственно-когерентных МП РЛС с частичной, неполной или кратковременной пространственной когерентностьюпространственная когерентность сохраняется на интервале времени порядка времени наблюдения рассеянного или излученного целью сигнала. Обычно это время не превышает долей секунды. При совместной обработке сигналов может использоваться вся информация, содержащаяся в комплексных огибающих сигналов разных позиций, в том числе, в изменениях фазовых соотношений на интервале наблюдения для измерения тангенциальной скорости цели или источника активной помехи разностно-доплеровским методом. Однако информация, содержащаяся в соотношении начальных фаз сигналов, не используется. В таких системах необходима взаимная привязка разнесенных позиции только по времени и частоте. Число разнесенных позиций в таких МП РЛС может быть значительно меньше, чем в пространственно-когерентных МП РЛС, и не требуется взаимная фазовая привязка позиций.
В пространственно-некогерентных МП РЛСфазовая информация полностью исключается в результате детектирования сигналов до их объединения. В связи с этим не требуется не только фазовая, но, как правило, и частотная привязка позиций. Обычно необходима лишь взаимная временная привязка (синхронизация). Пространственно-некогерентные МП РЛС проще, чем МП РЛС с кратковременной, а тем более с длительной пространственной когерентностью. Однако исключение фазовой информации приводит к энергетическим и особенно к информационным потерям. В частности, невозможно измерение тангенциальной скорости источников помех разностно-доплеровским методом.
Пространственная некогерентность МП РЛС не исключает временную когерентность каждой позиции до совместной обработки. В МП РЛС, состоящей из нескольких приемопередающих позиций с временной когерентностью, можно измерять доплеровское смещение частоты эхо-сигналов, а, следовательно, и радиальную скорость цели относительно каждой позиции.
В пространственно-некогерентных МП РЛС объединение сигналов или первичной радиолокационной информации может осуществляться на следующих уровнях:
а) объединение видеосигналов после детектирования в каждой позиции;
б) объединение обнаруженных и проклассифицированных отметок (единичных решений) и единичных замеров; при этом вся первичная обработка смесей сигналов, внешних помех и собственных шумов, включая сравнение с порогом, измерение параметров обнаруженных сигналов и их классификацию, проводится в каждой позиции, а на совместную обработку поступает только информация, которая признана «полезной»;
в) объединение траекторий (трасс); при объединении траекторий в каждой позиции проводится не только первичная, но и вторичная обработка информации, которая завершается построением траекторий целей; параметры траекторий сопровождаемых целей передаются в центр обработки для совместной обработки, в результате которой дополнительно отсеиваются «ложные» и уточняются «истинные» траектории.
Самолетный ответчик состоит из антенно-фидерного устройства, распределительного фильтра (РФ), приемника и дешифратора запросных сигналов, шифратора ответных сигналов и передатчика. Запросные сигналы с антенны ответчика через разделительный фильтр поступают в приемник, где преобразуются, усиливаются по промежуточной частоте и детектируются. Па выходе приемника ответчика образуется пачка парных импульсов запроса (рис. 6.3). Временные кодовые интервалы между парными импульсами (τзк1, τзк2) определяют содержание информации, которую должен передать ответчик.
Запросные сигналы поступают на вход дешифратора, в котором производится декодирование запрашиваемой информации. В простейшем случае дешифратор представляет собой набор линий задержек со стандартными временными интервалами задержки и логических схем «И». В результате совпадения двух запросных импульсов в дешифраторе образуется управляющий импульс для шифратора. Шифратор формирует импульсы координатного и соответствующего информационного кода (бортового номера или высоты и др.). На информационные входы шифратора поступает информация от соответствующих датчиков. Шифратор формирует пачку ответных видеоимпульсов, в которой закодирована запрашиваемая информация. Эти импульсы поступают на вход передающего устройства, состоящего из подмодулятора, модулятора и генератора свч.
Пачка видеоимпульсов преобразуется передающим устройством в пачку радиоимпульсов, которые через развязывающий фильтр поступают в антенну и излучаются в пространство. Несущая частота ответных сигналов (fo= 740 или 1090 МГц) отличается от несущей частоты запросных сигналов. Развязывающий фильтр выполняет функции антенного переключателя и выполняется обычно на полосковых линиях.
Ответные сигналы принимаются антенной и приемником вторичного радиолокатора и декодируются. В ответном сигнале имеются два координатных (опорных) импульса. По времени запаздывания этих импульсов относительно запросных с учетом времени задержки на кодирование и декодирование, определяется дальность до ответчика. Угловая координата ответчика определяется методом пеленгации по максимуму (в моноимпульсных системах метод иной и будет изложен ниже).
Дешифратор вторичного радиолокатора выделяет дополнительную ин-
формацию, переданную ответчиком (бортовой номер, высота и др.), которая
отображается на индикаторных устройствах.
В обобщенной структурной схеме изображены лишь основные устройства, поясняющие основной принцип действия системы вторичной радиолокации. Для обеспечения надежной работы системы как наземное, так и бортовое оборудование содержит дополнительные устройства, например, устройства, устраняющие влияние боковых лепестков диаграммы направленности антенны запросчика.
5.3. Кодирование запросных и ответных сигналов
5.3.1. Методы кодирования запросных и ответных сигналов
Для передачи информации во вторичных радиолокаторах применяется импульсное кодирование. Импульсный код - это совокупность импульсов, расположенных в соответствии с правилами кодирования. В качестве кодирующих признаков могут использоваться: длительность импульса, число импульсов, расстояние между импульсами, частота и фаза, наличие или отсутствие импульсов на определенных позициях. Интенсивность сигнала в качестве признака кодирования не используется из-за малой помехоустойчивости.
В существующих системах вторичной радиолокации используются два вида кодирования: времяимпульсное и позиционное.
Времяимпульсное кодирование применяется в запросном канале. При этом методе каждому из значений информации, подлежащей передаче, присваивается свой временной интервал. На рис. 5.4. изображена структура времяимпульсного кода. На рисунке обозначены: Тк - кодовый интервал
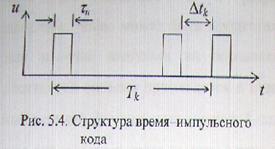
Δ t1интервал кодирования. Максимальное число днухимпульсных кодов N определяется следующим образом:

Времяимпульсные коды не могут дать большого числа кодовых комбинаций без значительного увеличения кодового интервала или увеличения числа импульсов в коде. Число вариантов запросных сигналов в системах вторичной радиолокации невелико, поэтому в запросном канале применяется двухимпульсное времяимпульсное кодирование.
Ответная информация имеет значительно больший объем, поэтому в ответном канале применяется позиционное кодирование, при котором значение ответной посылки определяется местами расположения импульсов кода на временной оси. Ответная информация имеет постоянный объем, носители информации являются десятичные и двоичные числа, для представления которых используется позиционная система счисления. В этой системе значения разрядов чисел зависят от места, отведенного каждой из цифр. Так, например, десятичное число 623 может быть представлено в виде: 6·102 +2·101 +3·10°. Каждому разряду числа при этом соответствует своя позиция.
Любое число в позиционной системе может быть записано следующим образом:

где an,, … - коэффициенты слагаемых; Р - основание системы.
При основании Р=2 базисом числа являются две цифры: 0 и 1, а при Р=10 используются цифры 0, 1, ..., 9.
Ответная информация с борта воздушного судна кодируется с использованием двоично-десятичной и двоично-восьмеричной системы счисления. Число значений N дискретной информации, которое может быть переданным кодом, составляет N=2m (m - разрядность кода). Передача символом 0и 1 двоичных чисел может быть осуществлена импульсным сигналом (отсутствие или наличие импульса на определенной временной позиции). Двоично-десятичная система применяется в ответных кодах режима УВД (отечественный режим) Двоично-восьмеричный код имеет базис цифр 0, ...,7 и применяется для ответных кодов высоты в режиме RBS (международный режим).
При передаче числа позиционным двоичным кодом каждому из его разрядов определено свое место (позиция). Существует два способа предоставления позиций (рис. 5.5).

На рис. 5.5, а изображен четырехразрядный двоичный позиционный код с пассивной паузой. При этом каждому из четырех разрядов предоставляется одна временная позиция. Единица соответствует наличию импульса, нуль - его отсутствию. Во втором случае (рис. 5.5, б) каждому из четырех разрядов двоичного числа предоставляется две временные позиции. Импульс на первой позиции обозначает «1», на второй - «О». Этот метод называется методом с активной паузой.
5.3.2. Структура запросных сигналов
Кодирование запросных сигналов осуществляется с целью уменьшения вероятности срабатывания ответчика от случайных сигналов, а также для получения определенного вида информации по каналу ответа.
В существующих системах вторичной радиолокации применяются два формата стандарта кодирования (отечественный и международный). Передача кодированных сигналов по нормам ICAO производится только на несущих частотах 1030 МГц (запрос) и 1090 МГц (ответ). Отечественный стандарт устанавливает частоты: 837,5МГц (запрос) и 740МГц (ответ). Кодирование запросных сигналов в обоих форматах производиться импульсно-временным кодами.
Запросный код состоит из двух импульсов, обозначаемых Р1 и Р3 с кодовым интервалом τзк между их фронтами. Кодовые интервалы и вид запрашиваемой информации представлены в табл. 5.1.
Таблица 5.1
| Шифр кода | Интервал Т, мкс | Информационное содержание |
| сигналов от ответчиков | ||
| Код RBS | ||
| А | Опознавание ВС (бортовой номер) | |
| С | Высота полсти | |
| D | Резерв | |
| Код УВД | ||
| ЗК1 | 9,4 | Бортовой номер ВС |
| ЗК2 | Высота полета и запас топлива | |
| ЗКЗ | Вектор путевой скорости | |
| ЗК4 | Координаты ВС |
Сигналы запроса режима RBS имеют вертикальную поляризацию, режима УВД - горизонтальную. Для подавления сигналов боковых лепестков в трехимпульсной системе подавления по каналу запроса между импульсами Р1 и Р3 излучается импульс Р2 следующий через 2±0,15 мкс после импульса Р1. Длительность импульсов запросных кодов и импульса подавления составляет 0,8 ±0,1 мкс.
5.3.3. Структура ответных сигналов
5.3.3.1. Ответный сигнал режима УВД
Ответный сигнал самолетного ответчика включает в себя: координатный, ключевой и информационный сигналы. Структура ответного сигнала изображена на рис. 5.6.

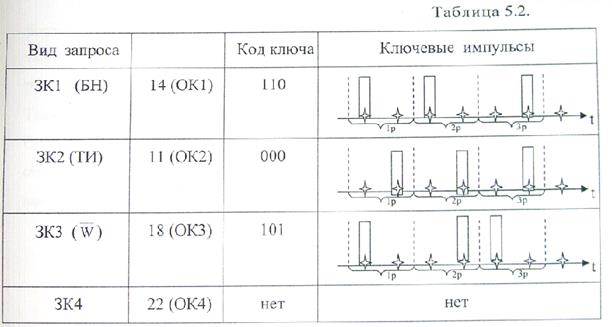
Координатный код состоит из двух импульсов, обозначенных РК1 и РК3 .Временной интервал между ними зависит от кода запроса и определяется в соответствии с табл. 5.2.
Совместно с импульсами РК1 и РК3 может передаваться сигнал «бедствие», который должен отстоять от импульса РК3 на 6 мкс.
После координатного кода следует ключевой код, состоящий из трех импульсов РКИ1..3 Интервал τ к_кл, между импульсом РК3 координатного хода и импульсом РКИ1 должен соответствовать следующим значениям: при передаче
бортового номера - 8,5 мкс; высоты полети и запаса топлива 14 мкс; вектора
скорости - 10 мкс. Ключевой код передается в двоичном системе счисления
тремя разрядами методом активной паузы. И каждом разряде дно починим, временной интервал между которыми 4 мкс. Ключевой код 1 К), изображенный на рис. 5.6, соответствует передаче бортового номера.
Для передачи информационного сигнала используется двоичная система счисления. Информация передается 40 разрядами методом активной паузы (80 позиций). Временной интервал между соседними позициями в разряде - 4 мкс. Для повышения достоверности информации на земле, она передается дважды: с 1-го по 20-й разряд и с 21-го по 40-й разряд. Временной интервал между последней позицией ключевого кода и первой позицией информационных импульсов составляет 4 мкс.
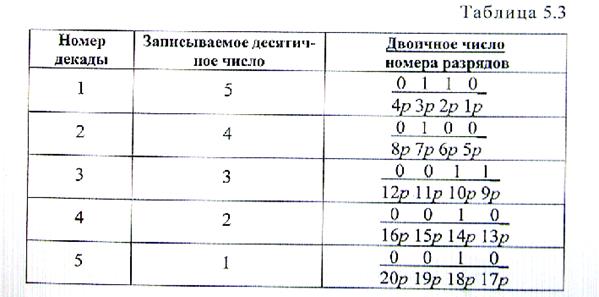
На рис. 5.7. изображена полная структура ответного сигнала при запросе бортового номера. Все разряды ответного кода разбиваются на декады (по четыре разряда в каждой), причем в первой декаде передаются единицы, во второй - десятки, в третьей - сотни, в четвертой - тысячи, в пятой - десятки тысяч. Такой код называется двоично-десятичным пятидекадным четырехразрядным. Он позволяет передавать номера от 00000 до 99999. На рис. 5.7 изображена структура ответного сигнала при передаче бортового номера 12345. Формирование кода сигнала бортового номера поясняется таблицей 5.3.

При запросе кодом ЗК2 ответчик передает информацию о высотеполета и остатке топлива. Информация о высоте передается и 1...14 разрядах. В 15-м разряде указывается признак высоты: «1» абсолютам; « - относительная. В 16-м разряде значение «1» соответствует сигналу БЕДСТВИЕ (этот же сигнал указывается импульсом РК2 в координатном коде). Данные о запасе топлива в процентах от полной вместимости топливных баков даются и 17...20 разрядах информационного кода. На рис. 5.8. изображена структура ответного сигнала при запросе текущей информации: абсолютная высота 1270 м и остаток топлива 30%. Формирование ответного сигнала поясняется таблицей 5.4, 5.5.
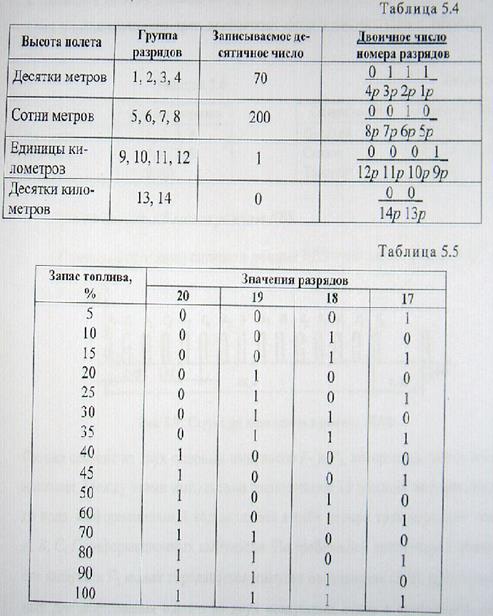
В ответном сигнале, возможно, передавать высоту полёта до 30000м с градациями через 10м. Кроме того, возможна передача отрицательных значений абсолютной барометрической высоты от 0 до 300м. При передаче отрицательны значений высоты 8, 13, 14 должны иметь символ «0», а разряды 9, 10, 11, 12 – символ «1». Значение абсолютной высоты передается группой разрядов 1…7.
При запросе кодом ЗКЗ ответчик формирует информационное слово,
обеспечивающее передачу аргумента вектора скорости в пределах от 0 до 360
градусов с градацией 1 градус и значения модуля вектора скорости в интервале от 0 до 3500 км/ч с градацией 10 км/ч. Данные об аргументе и модуле вектора скорости передаются с использованием трех десятичных цифр в соответствии с таблицей 5.6, 5.7.
6.4.3.2 Ответный сигнал режима RBS
Структура ответного сигнала в режиме RBS изображена на рис. 5.19.

Сигнал состоит из двух опорных импульсов F1и F2, которые являются координатными. Между этими импульсами расположены 13 позиций информационного кода. Информационный код включает в себя четыре трехразрядных декады А, В, С, D информационных импульсов. По требованию диспетчера с земли после импульса F2 может передаваться импульс опознавания (SPI), предназначенный для опознавания одного из двух воздушных судов с одинаковым кодом опознавания. Несущая частота сигнала 1090МГц, поляризация вертикальная.
Временной интервал между опорными импульсами 20.3 мкс. Импульс: SPI следует за импульсом F2 через 4,35 мкс. Все импульсы имеют длительность 0,45 мкс. Временные позиции соседних разрядов информационных импульсов следуют через 1,45 мкс.
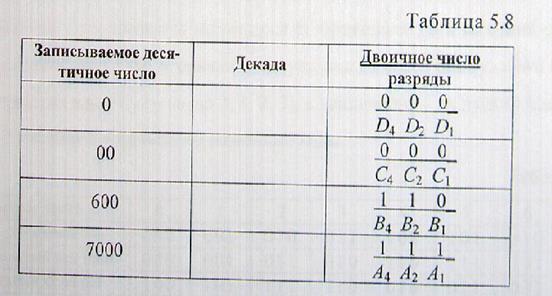
При запросе кодом А самолетный ответчик передает условный номер натуральным двоично-восьмеричным четырехразрядным кодом. Декадой А передаются тысячи, В - сотни, С - десятки, D - единицы. Каждая декада имеет три разряда, поэтому передача чисел 8 и 9 невозможна. Наибольшее число, которое может быть передано - 7777, а общее количество чисел - 4096.
На рис. 5.10 изображено расположение информационных импульсов
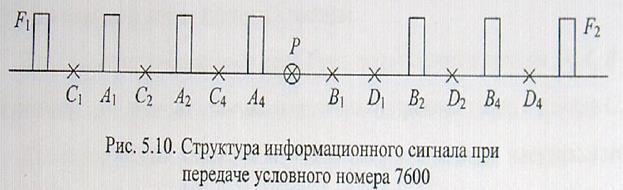
при передаче условного номера 7600, что соответствует сообщению об отсутствии радиосвязи. Позиция, обозначенная Р - резервная. Формирование кода условного номера можно пояснить таблицей 5.8.
При запросе ответчика кодом С с борта воздушного судна передается информация о барометрической высоте в футах с градацией через 100 футов
(30,48 м). Передача данных о высоте ведется четырьмя декадами со следующими ми градациями в декадах:
D-32000 футов,
А - 4000 футов,
В-500 футов,
С - 100 футов.
Отсчет высоты ведется от остаточной - 1200 футов.
При передаче быстроменяющейся информации о высоте международными нормами утвержден циклический код Гиллхема, представляющий собой совокупность трехдекадного кода Грея и специального трехразрядного кода Гиллхема. Особенностью такого кода является то, что для соседних градаций высоты коды различаются в одном разряде, что уменьшает вероятность ошибок при наложении цифровых значений высоты.
Для передачи рефлексного кода Грея используются декады D, А, В ответного сигнала, для передачи специального трехразрядного кода-декада С.
Для того, чтобы десятичное число записать в виде натурального кода Грея, необходимо вначале его представить натуральным двоичным кодом, а затем сдвинуть разряды двоичного числа на один разряд вправо (младший разряд теряется), а потом произвести поразрядное сложение сдвинутого и не сдвинутого числа без переноса из разряда в разряд. При этом считается, что 1+1=0. Зеркальный код Грея создается зеркальным отображением двух младших разрядов натурального кода Грея и заменой у натуральных кодов Грея нулевого старшего разряда на единицу (у чисел 0, 1, 2, 3), а единичного - на нуль (у чисел 4, 5, 6, 7). В таблице 5.9 приведены названные коды.
Таблица 5.9
| Десятичное число | ||||||||
| Натур. двоичный код | 1 11 | |||||||
| Натуральный код Грея | ||||||||
| Зеркальный код Грея |
Рефлексный код Грея строится следующим образом. Если на предыдущих соседних трех позициях высшего разряда передаваемого десятичного числа записано четное число, то на следующих позициях низшего разряда десятичное число запишется натуральным кодом Грея. Если записано нечетное ЧИСЛО, то используется зеркальный код Грея. Специальный рефлексный код, используемый для передачи младших разрядов высоты, приведен в таблице 5.10.

Для примера, рассмотрим структуру ответного сигнала мри кодировании высоты 134480 футов. С учетом остаточной высоты 1200 футов необходимо на землю передать значение высоты, равное 135680. Число градаций старшей декады D определится следующим образом:
135680ф:32000ф=4 (остаток 7680ф).
Число «4» записываем в натуральном коде Грея (более старшей декады нет, что соответствует нулю в предыдущих разрядах): 110, причем D1=l; D2=l; D4=0. Число градаций, которое необходимо записать в декаде А:
7680ф:4000ф=1 (остаток 3680ф).
Число «1» записываем в том же натуральном коде Грея, поскольку в предыдущем разряде записано четное число. Код будет равен 001 :А1=0; А2=0; А4=1.
Число градаций в декаде В:
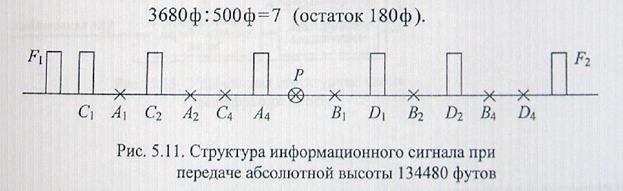
В соседней декаде записано нечетное число, поэтому в декаде В число «7» записывается зеркальным кодом Грея, а именно, 000: В1=0; В2=0; В4=0.
В соответствии с таблицей 5.10 180 футам соответствует десятичное число «2», учитывая, что в соседней декаде В записано нечетное число, декаду С
следует кодировать зеркальным специальным рефлексным кодом: 110. При этом С1=1; Сг=1; С4=0. Структура информационного сигнала, в котором закодирована высота 134480 футов, изображена на рис. 5.11.
Для получения числа, обозначающего высоту, необходимо пользоваться специальными таблицами.
5.4. Дешифрация ответной информации
5.4.1. Дешифрация сигналов в режиме УВД
Входная информация, включающая в себя запросные коды и ответные видеосигналы режимов УВД и RBS, с выходов соответствующих корректирующих видеоусилителей поступает на входы трех дешифраторов (рис. 5.13).
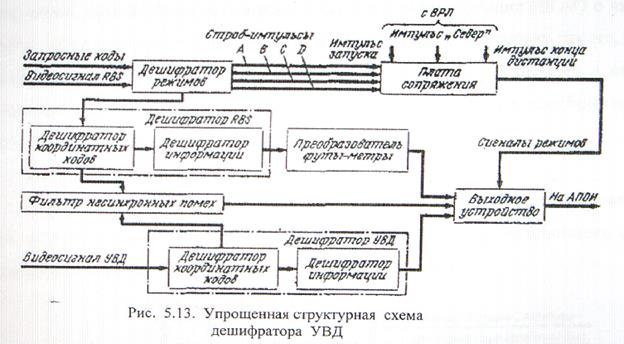
Состав обрабатываемой информации определяется структурой запросных кодов. Импульсы запросных кодов Р1и Р3 поступают на дешифратор режимов, где происходит их декодирование и формирование соответствующих стробов режимов А, В, С, D.
Эти стробы являются служебными для селектирования определенной ответной информации. Они поступают через плату сопряжения на выходные устройства.
В плате сопряжения осуществляется нормирования служебных сигналов ВРЛ и распределение их на устройства аппаратуры.
Дешифраторы УВД и RBS включают в себя дешифраторы координатных, ключевых кодов, кодов «Бедствие», «Знак», а также дешифраторы информации, поступающей из приемных устройств ВРЛ.
Для обработки информации от ВС, находящихся на незначительном удалении друг от друга, дешифраторы выполнены как двухканальные, что позволяет производить декодирование сигналов при наложении ответных кодов.
Декодированная координатная информация очищается в фильтре от несинхронных помех. Декодированная информационная посылка ИКАО о высоте полета, передаваемая в футах, преобразуется в метры и поступает так же, как и информационная посылка УВД, на выходные устройства. В режиме А информационная посылка проходит на выходные устройства через преобразователь футы-метры без изменения.
Принцип действия дешифратора УВД
Дешифратор УВД (рис. 5.13) осуществляет декодирование координатного кода, кода «бедствие», ключевого кода, кода «Знак» и информационного слова, выдаваемых ответчиком при запросе кодами ЗК1 и ЗК2.

Дешифратор декодирует одиночные и переплетенные ответные коды, образованные в результате наложения двух ответов для близко летящих ВС, исправляет в ответной посылке одиночные и обнаруживает двойные ошибки. Поскольку каждый разряд информационного слова передается на двух позициях, то возможно преобразование одиночных и двойных ошибок. Одиночной ошибкой считается стирание или возникновение одного из символов в разряде информационного слова. Двойной ошибкой считаются следующие искажения: стирание одного и возникновение другого символа в разряде, образование двух ошибочных символов, стирание двух символов. Так как ответчик при работе кодами УВД на каждый запрос дважды выдает информационное слово, то для обнаружения и исправления ошибок в дешифраторе УВД осуществляется запоминание первого 20-разрядного слова и его поразрядное сравнение с одноименными позициями второго слова.
Дешифратор УВД осуществляет декодирование ключевого кода при одиночных ответах по логике «2 из 3», а при переплетенных ответных кодах - по логике «3 из 3», т.е. совпадением любых двух из трех или трех из трех импульсов ключевого кода.
Входной ответный сигнал поступает на дешифратор кодов ДК1, в котором осуществляются его нормализация по амплитуде и селекция по длительности. Информационное слово без задержки поступает в дешифратор информации. Импульсы стирания запрещают прохождение информационных импульсов на выход платы ДК1. После задержки на 6 мкс в ДК1 все импульсы, предшествующие информационному слову, поступают на дешифратор кодов ДК2, где происходит их дополнительная задержка на 22 мкс, которая позволяет осуществлять декодирование координатного кода, кода «бедствие» и ключевого кода по логике «3 из 3». В дешифраторе кодов ДКЗ декодированная координатная отметка задерживается еще на 16 мкс для совмещения с последним импульсом ключевого кода. В случае одиночных ответов в плате ДКЗ осуществляется также декодирование ключевого кода по логике «2 из 3», что позволяет увеличить вероятность декодирования ключевого кода при подавлении одного из трех импульсов ключевого кода.
Для декодирования информационного слова, служат кварцевый калибратор КК и дешифратор информации ДИ. Декодированным импульс ключевого кода с выхода дешифратора ДКЗ запускает кварцевый калибратор, вырабатывающий опорные импульсы частотой 4 МГц. Из импульсов кварцевого калибратора формируются импульсы сдвига, позволяющие выделить и записать в дешифраторе информации только информационное слово длительностью 160 мкс. В устройстве контроля один раз в 10с формируется контрольный текст, который обрабатывается дешифратором. После анализа выносится решение о состоянии дешифратора.
5.4.2. Дешифратор режима международного диапазона
В состав дешифратора канала МД входят дешифратор режимов, в котором путем декодирования запросных кодов формируются служебные стробы режимов, дешифратор информации, включающий дешифратор аварийных кодов и импульсов опознавания.
Функциональная схема дешифратора канала МД представлена на рис. 5.14. В плате дешифратора режимов, кроме формирования стробов режимов, производится декодирование координатного кода путем задержки ответного сигнала и совмещения опорных импульсов F1и F2.Совпадение импульсов F1и F2фиксируется на схеме И1, где и происходит образование импульса декодированной координатной отметки (ДКО). Перед подачей на схему задержки импульсы входной информации селектируются по длительности в пороговом устройстве ПУ и на счетных триггерах распределителя Р преобразуются в перепады напряжений. Данное преобразование улучшает условие прохождения сигнала через узкополосную линию задержки ЛЗ на 20,3 мкс. На выходе ЛЗ импульсы восстанавливаются по длительности и поступают на схему И1 и на сдвигающие регистры дешифратора информации.
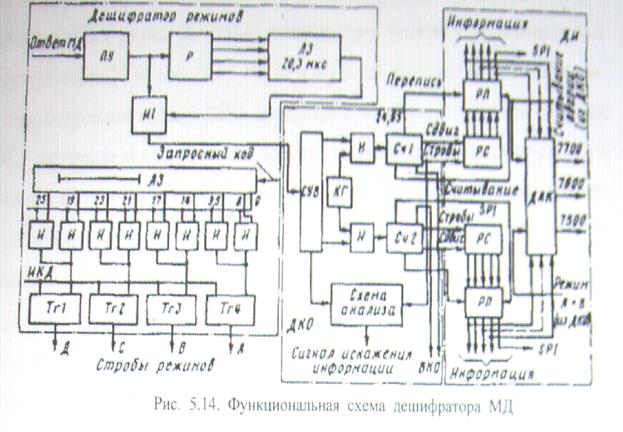
Декодирование запросных кодов осуществляется по принципу совпадения импульсов Р1 и Р3 запросных кодов, соответствующих режимам. Стробы режимов формируются на триггерах Тг1...Тг4, которые запускаются импульсами декодированных запросных кодов, а в нулевое состояние возвращаются импульсом «Конец дистанции».
В плате дешифратора координатных отметок ДКО производится логическая обработка КО. Двухканальная схема построения ДКО и ДИ канала МД позволяет декодировать ответы от двух самолетных ответчиков, информационные посылки от которых взаимно наложились. Исключение представляет случай. когда интервал между кодовыми импульсами первой и второй посылками равен точно 1,45 мкс. В этом случае ДКО выдает только координатные отметки, а ответная информация не обрабатывается. Схема анализа в этом случае выдает сигнал «Искажение информации» и блокирует выдачу сигналов «Считывание» и «Признак». Декодированные координатные отметки запускают девятиразрядные счетчики Сч, причем схема управления включения СУВ счетчиков обеспечивает запуск Сч1 первой КО, а второй - последней КО в их возможной серии на интервале 24,65 мкс. Счетчики с помощью импульсов кварцевого генератора КГ, период следования которых пропорционален 1,45 мкс, формируют выходную координатную отметку, а также последовательность стробирующих, сдвигающих и других вспомогательных импульсов, которые управляют работой дешифратора информации. Выходная координатная отметка (ВКО) канала МД формируется через 24,65 мкс (20,3 + 4,35 мкс) после запуска счетчика. При работе с совмещенными кодами ВКО снимается с последнего триггера счетчика через 37,7 мкс после его запуска, т.е. дополнительно задерживается на 13 мкс и используется в плате формирователя канала ОД для выработки сигналов управления дешифратором отечественного капана. Одновременно с ВКО формируются сигналы считывания (переписи) и признака канала. Импульс считывания аварии совпадает по времени с ВКО 24,65 мкс. Импульс считывания SPI представляет собой ВКО 37,7 мкс, задержанную дополнительно на 4,35 мкс. Сигнал «Перепись» позволяет пересылать информацию из сдвигающегося регистра PC в регистр памяти РП ДИ. По существу ДИ представляет собой преобразователь последовательного кода в параллельный. С выходов регистров памяти информация поканально в параллельном коде поступает на дешифратор аварийных кодов ДАК, а также на преобразователь информации «Футы-метры». Декодирование аварийных кодов осуществляется на схемах совпадения при наличии строба «Режимов А + В» и импульса считывания аварии. В блоке ДИ канала МД предусмотрено накопление декодированных импульсов аварии в течение нескольких зондирований для уменьшения вероятности ложной тревоги и последующей выдачи на выходное устройство сигналов аварии: 7700, 7600 и 7500.
Информация о высоте в футах, передаваемая согласно нормам ИКАО, в режиме С кодом Гиллхэма преобразуется в преобразователе «Футы-метры» в метрическую систему счисления и представляется в виде двоично-десятичного кода. Четыре канала преобразователя осуществляют координатный анализ и обработку поступающей информации. В режимах А и В информационная посылка не подвергается преобразованию.
Выходная декодированная координата дополнительно очищается от несинхронных помех в устройстве защиты, представляющем собой гребенчатый фильтр, настроенный на частоты, кратные частоте повторения импульсов запуска ВРЛ (рис. 5.15). Основу фильтра составляют два регистра сдвига Рг на 35
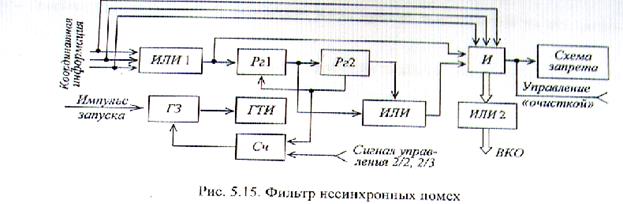
разрядов каждый и схемы совпадения. Каждый разряд состоит из двух ячеек триггерной памяти: основной и промежуточной. С помощью тактовых импульсов входной сигнал продвигается по регистрам сдвига, причем время задержки в каждом регистре определяется генератором тактовых импульсов ГТИ, который запускается импульсом генератора запуска ГЗ, совпадающим с началом отсчета дальности, а останавливается импульсом счетчика Сч, соответствующим концу периода следования запросных импульсов ВРЛ. При логике обработки 2/2 задержанный сигнал подается на схему совпадения И с Рг1.При логике обработки 2/3 задержанный на два периода повторения сигнал снимается с выхода регистра Рг2. Сигнал «Управление очисткой» позволяет блокировать фильтр. Дешифратор МД выполнен на четырех печатных платах с использованием микросхем 130, 133, 136 и 217 серий.
5.5. Дискретно-адресная система вторичной радиолокации
Существующая система вторичной радиолокации обладает рядом недостатков, наиболее существенными из которых являются следующие:
- наложение ответных сигналов от воздушных судов, имеющих близкие значения наклонной дальности и азимута;
- ложные ответы на запросы по боковым лепесткам ДНА;
- переотражения сигналов от находящихся вблизи систем вторичной радиолокации «местных» предметов (возвышенностей, зданий и т.п.);
- насыщение радиоканала сигналами из-за приема всех ответов па все запросы.
Кардинальным решением для устранения недостатков является переход к системам вторичной радиолокации с адресным запросом. В такой системе каждое воздушное судно имеет свой код адреса и отвечает на запрос только на свой код. При индивидуально-адресном запросе ответный сигнал будет излучать только один ответчик, адрес которого указан в запросе.
Дискретно-адресная система предполагает присвоение каждому воздушному судну адресного кода. Наземная станция должна содержать в оперативном запоминающем устройстве данные об адресном коде и приблизительном местоположении всех воздушных судов, находящихся в зоне обнаружения ВРЛ. Для выявления новых воздушных судов предусмотрен режим опроса всех самолетов. По ответной посылке наземная станция определяет оснащенность воздушного судна аппаратурой DABS (Discrete address beacon system). To воздушное судно, которое имеет ответчик дискретно-адресной системы, в режиме опроса сообщает свой адресный код. Последующий запрос будет направляться только по соответствующему адресу, поэтому ответчики, имеющие другие адреса, на него не отвечают. В наземной станции предполагается использование моноимпульсного метода радиолокации, что позволит повысить точность определения азимута объекта. Все это обусловливает уменьшение помех в каналах запроса и ответа, а также уменьшить темп запроса.
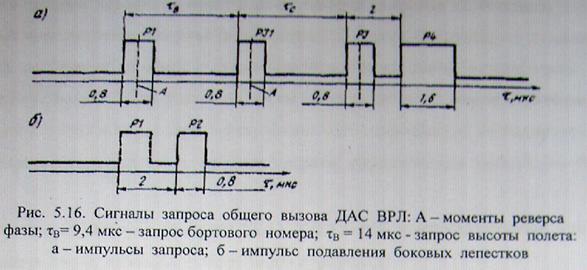
Формат сигналов запроса адресной системы ВРЛ выбран таким образом, чтобы она была полностью совместима с существующей системой. Система имеет общий и адресный коды запроса. Структура сигнала общего запроса изображена на рис. 5.16.
На общий запрос реагируют ответчики воздушных судов в любом режиме. Интервал  в соответствует режиму RBS, интервал с - режиму УВД. Импульс Р4 используется адресным отметчиком для сообщения запросчику индивидуального кода.
в соответствует режиму RBS, интервал с - режиму УВД. Импульс Р4 используется адресным отметчиком для сообщения запросчику индивидуального кода.
Адресный запрос (рис. 5.17) начинается с преамбулы, состоящей из двух импульсов, воспринимаемых обычными ответчиками как запрос, излучаемый по боковым лепесткам ДНА. Поэтому обычные ответчики на адресный запрос не отвечают. За преамбулой (или ключевым кодом) следует информационный
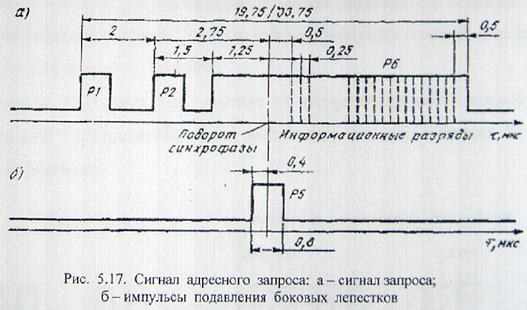
сигнал, который содержит 56 или 112 бит информации, передаваемой относительной фазовой модуляцией. Модуляция фазы высокочастотной несущей обеспечивает скорость передачи данных 4 Мбит/с, что позволяет передать 112-битовое сообщение за время, соответствующее блокировке обычных ответчиков. При относительной фазовой модуляции первый поворот фазы является синхронизирующим. Каждый следующий поворот возможен с декретом 0,25
мкс. Для защиты адресного ответчика от приема запросов по боковым лепесткам ДНА используется импульс подавления РS, который передается с помощью антенны, центрируется относительно момента опрокидывания синхрофазы. Появление импульса Р5 при достаточной амплитуде затеняет опрокидывание синхрофазы в адресном ответчике, и результате чего информация не кодируется,
Информационная часть сигнала запроса, передаваемая импульсом Р6 содержит:
- две продолжительные посылки (1,25 и 0,5 мкс), предназначенные для подстройки по фазе гетеродина бортового ответчика;
- 32 или 88 импульсов для передачи кода запроса;
- 24 импульса адреса запроса.
Код адреса имеет разряд, служащий для выявления ошибки в коде путем проверки его на четность. Код позволяет создавать 223 (примерно 16 млн.) индивидуальных запросов. Информационный сигнал передается с помощью фа-зоманипулированного сигнала. Символу «0» соответствует нулевая фаза несущей частоты, символу «1» - φ = 180°.
Адресный ответ (рис. 5.18) состоит из четырехимпульсной преамбулы, сопровождаемой последовательностью импульсов, которые содержат 56 или 112 битов информации.

Двоичные данные передаются со скоростью 1 Мбит/с, причем интервал 1 мкс соответствует каждому биту. Такая скорость передачи данных по каналу «борт-земля» позволяет генерировать отпетые импульсы в режимах УВД, RBS, S (адресный запрос) одним передатчиком. Если значение бита равно единице, то импульс длительностью 0,5 мкс передается и нерпой половине интервала, если нулю - во второй.
Четырехимпульсный ключ позволяет легко различить адресный ответ от ответа режимов УВД, RBS и разделить их при взаимном наложении. Выбор кодоимпульсной модуляции для передачи данных по каналу ответа позволяет обеспечить высокую помехоустойчивость к мешающим сигналам УВД, RBS, a также способствует получению постоянного числа импульсов в каждом коде, гарантирующем достаточную энергию для точного моноимпульсного приема.
К характеристикам систем вторичной радиолокации, работающим в режиме S (дискретно-адресный режим), предъявляются более жесткие требования. Обязательным является использование моноимпульсной обработки для измерения азимута воздушных судов. Допуск на нестабильность частоты составляет ±0,01 МГц. Дискретно-адресные системы позволяют эффективно работать в зонах с интенсивным движением воздушных судов. Широкие перспективы таких систем обусловлены высокой надежностью, большой пропускной способностью цифровых линий передачи данных.
Дата добавления: 2015-06-22; просмотров: 5602;