Принцип измерения расстояния
Этот принцип основан на прямолинейности и постоянстве скорости распространения радиоволн. С большой степенью точности скорость распространения можно считать равной с = 300 000 км/сек. Значит, измерив время  , за которое сигнал проходит расстояние от приемо-передатчика до объекта и обратно, получим:
, за которое сигнал проходит расстояние от приемо-передатчика до объекта и обратно, получим:
 . (8.3)
. (8.3)
Полезно запомнить такие соотношения: время распространения = 1 мкс соответствует расстоянию R = 150 м; расстоянию R = 1 км соответствует время = 6,7 мксек.
Однако, измерив расстояние, мы ещё не устанавливаем местоположение объекта, а лишь определяем некоторую поверхность, на которой находится цель – поверхность положений цели. При измерении дальности поверхностью положения является сфера радиусом R с центром в точке расположения приемо-передатчика. Если к тому же известно, что цель находится в плоскости горизонта, то измеренному значению соответствует линия положения в виде окружности радиуса R.
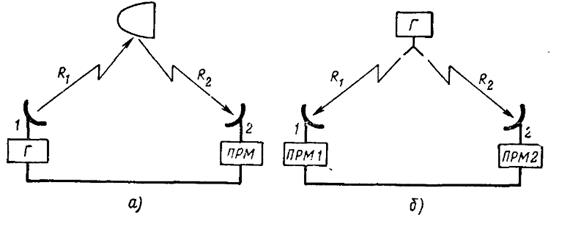
Рис. 8.1. Суммарно-дальномерная (а) и разностно-дальномерная (б) системы.
Приемник и передатчик радиолокационной системы могут быть разнесены (рис. 8.1, а). В этом случае измеренный интервал времени соответствует сумме расстояний от объекта до приемного (ПРМ) и передающего (Г) пунктов  . Если
. Если  , то
, то  . Это выражение определяет в пространстве поверхность положения в виде эллипсоида вращения или линию положения – эллипс – на земной поверхности (рис. 8.2, а). Пункты расположения приемника и передатчика являются фокусами эллипсоида. Такая радиолокационная система называется суммарно-дальномерной.
. Это выражение определяет в пространстве поверхность положения в виде эллипсоида вращения или линию положения – эллипс – на земной поверхности (рис. 8.2, а). Пункты расположения приемника и передатчика являются фокусами эллипсоида. Такая радиолокационная система называется суммарно-дальномерной.
Можно построить и систему, в которой излучения объекта принимаются двумя разнесенными пассивными РЛС и измеряется разность прихода сигналов (рис. 8.1, б). Такая разностно-дальномерная система измеряет разность расстояний  между объектом и пунктами приема. Фиксированному значению соответствует и фиксированная разность
между объектом и пунктами приема. Фиксированному значению соответствует и фиксированная разность  . В этом случае поверхность положения, определяемая уравнением
. В этом случае поверхность положения, определяемая уравнением  , представляет собой гиперболоид вращения, а линия положения – гиперболу (рис. 8.2, б).
, представляет собой гиперболоид вращения, а линия положения – гиперболу (рис. 8.2, б).
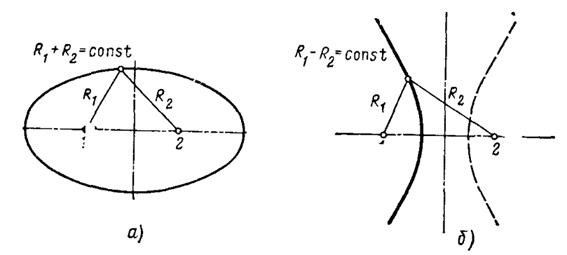
Рис. 8.2. Линии положения суммарно-дальномерной (а) и разностно-дальномерной (б) систем
Дата добавления: 2015-06-22; просмотров: 1136;