Биомеханика скелетной мышцы
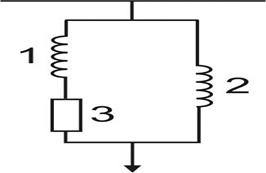
Согласно основным принципам (Хилл) мышца состоит из (Рис)
|
:
1. Сократительного элемента (1);
2. Недемпфированного упругого элемента (2).
В состоянии покоя и сократительный и упругий элемент растяжимы и не создают напряжения покоя. В состоянии сокращения элемент 1 укорачивается и в итоге либо развивается напряжение (фиксированные концы), либо укорочение (нефиксированные концы).
Основной параметр биомеханических свойств мышцы является соотношение между скоростью укорочения и нагрузкой (зависимость «сила-скорость». - уравнение Хилла.
Теплота в фазу одиночного изотонического сокращения состоит из теплоты укорочения и теплоты активации. Теплота активации – теплота момента нанесения раздражения до появления механической реакции:
А – теплота активации – тепловой эквивалент всех реакций, включая ПД до момента начала укорочения.
Q – теплота укорочения – линейно зависит только о степени укорочения и не зависит от нагрузки.
Общая теплота:
Н = А + Q,
где: Q = аx, А – теплота активации; x – степень укорочения; а – коэффициент укорочения (а=0,038 Вт×сек/см3 = Дж/см2).
При тетаническом сокращении отдельные теплоты активации будут суммироваться:
H = ftA + a× l/3,
где: ftA – теплота поддержания; f – частота раздражения;t – его длительность;l/3 – берется потому. что при max тетанусе мышца сокращается на 1/3 исходной длины.
В рабочую фазу мышца способна производить работу и общая энергия сокращения:
Е = Н + W = A + ax + W,
где: W – затрата на подъём груза и W =Px
Кинетический компонент Wк » 0.
Е = А +аx + Px
 .
.
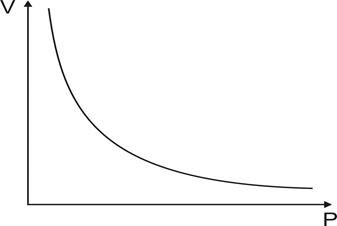
Хилл экспериментально установил, что  линейно зависит от (Р0-Р) с каким-то коэффициентом b, где Р0– max при тетанусе;Р– нагрузка при данном исследовании.
линейно зависит от (Р0-Р) с каким-то коэффициентом b, где Р0– max при тетанусе;Р– нагрузка при данном исследовании.

или:
 , Р0 – const.
, Р0 – const.
График этой зависимости: гипербола с асимптотами а и b, где Р®0 и G = Vmax
|
График изометрического сокращения определяет зависимость силы сокращения от линейных параметров саркомера (Рис.):
|
Дата добавления: 2015-06-22; просмотров: 1482;