Взаимодействие управляющей ЭВМ и объекта управления через программу-диспетчер.
Для синхронизации работы программ и организации обмена данными между блоками САУ используется управляющая программа, называемая диспетчером. В этой программе реализуется алгоритм очередности выполнения разных программ по приоритетам, вплоть до прерывания выполнения текущей программы.
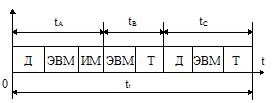
На рис.56 приведены временные диаграммы работы САУ при последовательном выполнении операций (а) и в режиме мультипрограммирования под управлением программы «диспетчер» (б). На этом рисунке показаны отрезки времени работы отдельных блоков САУ:
Т - терминалы (дисплей, пульт и т.д.),
Д - датчики и измерительные контроллеры
ИМ - исполнительные механизмы
ЭВМ - работа управляющей ЭВМ.
(а)
(б)
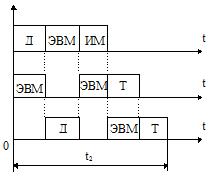
Рис.56 Временные диаграммы работы САУ
Из рис.56а видно, что продолжительность выполнения задачи управления при последовательном выполнении команд 
t1 = tA+ tB + tC ,
где  - время для передачи данных с датчиков на ЭВМ и формирования сигналов для исполнительных механизмов,
- время для передачи данных с датчиков на ЭВМ и формирования сигналов для исполнительных механизмов,
 - время для передачи данных от ЭВМ к терминалам,
- время для передачи данных от ЭВМ к терминалам,
 - время для передачи данных с датчиков к ЭВМ и далее к терминалам.
- время для передачи данных с датчиков к ЭВМ и далее к терминалам.
На рис.56б время  - это продолжительность выполнения задачи управления объектом в режиме мультипрограммирования. Из сравнения рис.56а и 56б видно, что
- это продолжительность выполнения задачи управления объектом в режиме мультипрограммирования. Из сравнения рис.56а и 56б видно, что  , т.е. в режиме работы под управлением программы «диспетчер» время для управления уменьшается, что очень важно для работы САУ в реальном масштабе времени.
, т.е. в режиме работы под управлением программы «диспетчер» время для управления уменьшается, что очень важно для работы САУ в реальном масштабе времени.
Экономия времени достигается за счет того, что во втором режиме ЭВМ работает почти непрерывно и выполняет при этом разные программы.
Дата добавления: 2015-06-17; просмотров: 1392;