Электропривод с вентильным двигателем
Синтез регуляторов в электроприводе осуществляется аналогично приводу постоянного тока. При этом внутренний контур тока постоянными Tф и Ts целесообразно заменить одним апериодическим звеном. Скоростной контур настраивается на оптимум по модулю или симметричный оптимум в зависимости от требований к реакции системы на возмущение по моменту. При построении электропривода на базе вентильной машины одним из основных требований является наличие замкнутых контуров регулирования токов. Это позволяет поддерживать в переходных и установившихся режимах и, тем самым, существенно улучшить энергетические характеристики.
Модель электропривода, в которой использована математическая модель вентильной машины показана на рис. 3.28

Рис. 3.28. Цифровая виртуальная модель ВМ Drive SD dq .
В модели , рассмотренной выше , регуляторы тока реализованы во вращающейся системе координат. При этом обратная связь срабатывает оба инерционные звена с постоянными T и T. Существует иной вариант построения контура тока, когда обратная осуществляется в неподвижной системе координат. При этом автономный инвертор – машина реализуется, а инерционное звено с постоянной времени не охватывается отрицательной обратной связью по току. В итоге в канале регулирования скорости остаются апериодическое звено с постоянной и интегрирующее звено с постоянной . При синтезе скоростного контура на оптимум по модулю передаточная функция регулятора соответствует пропорциональному звену с коэффициентом усиления
На рис. 3.29. показана модель электропривода с вентильной машиной, выполненная с использованием виртуальных блоков из библиотеки,. Блоки относящиеся к системе управления : преобразователь вращающихся координат, в неподвижные А,В,С(блок dq-АВС), гистерезисный регулятор тока (блок Current Regulator) аналогичны таковым в асинхронном электроприводе . Трехфазный автономный инвертор здесь реализован на MOSFET транзисторах.
В качестве двигателя взят ДБМ150-4-1.5.3.
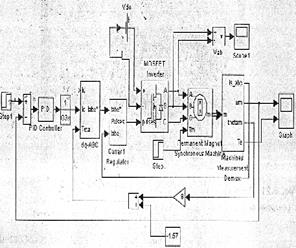
Рис.3.29. Цифровая виртуальная модель ВМ Drive SD Virt.
Датчик положения ротора реализован в преобразователе, на вход Teta которого подается угол поворота, ротора, умноженный на число на число пар полюсов плюс начальный угол установленный 90 эл.град. Таким образом смоделирована установка которой ıd=0.
Дата добавления: 2015-06-17; просмотров: 1128;