Математическое описание обобщенной асинхронной машины
Обобщенная асинхронная машина показана на рис 3.1. она содержит трехфазную обмотку на статоре и трехфазную обмотку на роторе. Обмотки статора и ротора подключены к трехфазным источникам напряжения. Математическое описание такой машины базируется на известных законах.
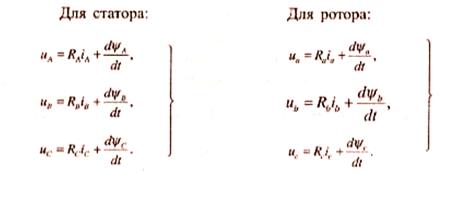
Уравнения равновесия э.д.с на обмотках статора и ротора базируются на втором законе Кирхгофа.
.  ( 3.1)
( 3.1)
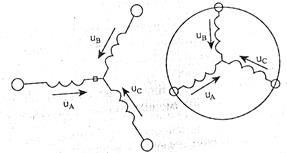
Рис.3.1 Обобщенная асинхронная машина
В уравнениях (3.1) фигурируют мгновенные напряжения, токи и потокосцепления статора и ротора, а также активные сопротивления обмоток. Обычно обмотки выполняются симметричными, и поэтому RA=RB=Rc=Rs-активное сопротивление статорной обмотки, Ra=Rb=Rc=Rs - активное сопротивление роторной обмотки.
Вторым используемым законом является закон Ампера, который связывает потокосцепления обмоток с токами, протекающими по обмоткам:
Для статора
 (3.2)
(3.2)
Для ротора
Удивительно симметричные уравнения для определения потокосцеплений показывают, что потокосцепление зависит от токов во всех обмотках; эти зависимости проявляются через взаимоиндукцию. В уравнениях (3.2) Laa,Lbb,Lcc, LA,LBB,Lcc,Lss являются собственными индуктивностями соответствующих обмоток, все остальные – взаимоиндуктивностями между соответствующими обмотками.
Третьим законом, лежащим в основе анализа, является второй закон Ньютона – закон равновесия моментов на валу машины:
 (3.3)
(3.3)
где J(кгм) – момент инерции на валу машины, учитывающий инерционность как самой машины, так и приведенной к валу инерционности рабочего механизма и редуктора,  - угловая скорость вала машины, - момент рабочего механизма, приведенный к валу, в общем случае он может быть функцией скорости и угла поворота.
- угловая скорость вала машины, - момент рабочего механизма, приведенный к валу, в общем случае он может быть функцией скорости и угла поворота.
Наконец, четвертым и последним законом, лежащим в основе анализа машины, является закон, сформулированный Ленцем, правило левой руки. Этот закон связывает векторные величины момента ,потокосцепления и тока:
Следует сразу подчеркнуть, что, несмотря на полное их математическое описание, использование уравнений (3.1,3.2) для исследования машины встречает серьезные трудности.
Перечислим основные:
-в уравнениях ( 3.3)фигурируют векторные величины, а в уравнениях ( 3.1,3.2) скалярные;
-количество взаимосвязанных уравнений равно 16, а количество коэффициентов -44;
-коэффициенты взаимоиндукции между обмотками статора и ротора в уравнениях (3.1) являются функцией угла поворота ротора относительно статора, то есть уравнения являются уравнениями с переменными коэффициентами.
-уравнение (3.3) является нелинейным, так как в нем перемножаются переменные.
На пути упрощения математического описания асинхронной машины, да и вообще всех машин переменного тока, удивительно простым и изящным оказался метод пространственного вектора тока который позволил существенно упростить и сократить выше приведенную систему уравнений; метод позволяет связать уравнения (3.1 - 3.3) в единую систему с векторными переменными состояния. Сущность метода состоит в том, что мгновенные значения симметричных фазных переменных состояния (напряжения, токи, потокосцепления) можно математически преобразовать так, чтобы они были прикреплены одним пространственным вектором это математическое преобразование
 (3.4)
(3.4)
имеет вид (например, для тока статора).
На рис.3.2 представлена геометрическая интерпретация пространственного вектора тока- это вектор на комплексной плоскости с модулем (длиной),вращающийся с угловой скоростью в положительном направлении. Проекции вектора на фазные оси А,В,С определяют мгновенные токи в фазах. Аналогично пространственными векторами можно представить все напряжения, токи и потокосцепления, входящие в уравнения (3.1),(3.2).
Теперь можно переходить к упрощению уравнений.

Рис.3.2. Пространственный вектор тока.
Шаг первый. Для преобразования уравнений (3.1) в мгновенных значениях к уравнениям в пространственных векторах умножим их на выражения; первые уравнения на 2/3, вторые – на 2/3а,третьи - на 2/3а, - и сложим раздельно для статора и ротора. Тогда получим:
 (3.5)
(3.5)
где L,L- собственные индуктивности статора и ротора,L взаимная индуктивность между статором и ротором. Таким образом, вместо двенадцати уравнений (3.1) – (3.2) получено четыре уравнения (3.5).
Шаг второй. Переменные коэффициенты взаимной индукции уравнениях (3.5) для потокосцеплений являются результатом того что уравнения равновесия эдс для статора записаны в неподвижной системе координат, связанной со статором, а уравнения равновесия эдс для ротора записаны во вращающейся системе координат связанной с ротором. Метод пространственного вектора позволяет записать эти уравнения в единой системе координат, вращающей произвольной скоростью В этом случае уравнения образуются к виду:
 (3.6)
(3.6)
В уравнениях (3.6) все коэффициенты являются величинами постоянными, имеют четкий физический смысл и могут быть определены по паспортным данным двигателя, либо экспериментально.
Шаг третий. Этот шаг связан с определением момента который является векторным произведением любой пары векторов. Из уравнения (3.6) следует, что так может быть шесть. Часто в рассмотрение вводится потокосцепление взаимной индукции . В этом случае появляется еще четыре возможности представления электромагнитного момента машины через следующие пары. После выбора той или иной пары уравнение момента приобретает определенность, а количество уравнений в системе сокращается до двух. Кроме того, в уравнениях и векторные величины момента и скорости могут быть заменены их модульными значениями. Это является следствием того, что пространственные векторы токов и потокосцеплений расположены в плоскости, перпендикулярной оси вращения, а векторы момента и угловой скорости совпадают с осью. В качестве примера покажем запись уравнений момента через некоторые пары переменных состояния машины.
 (3.7)
(3.7)
Шаг четвертый. На этом этапе уравнения (3.3),(3.6),(3.7) приводятся к безразмерным относительным величинам. В качестве основных базовых величин выбираются амплитудные номинальные значения фазного напряжения и тока, а также номинальное значение угловой частоты:
 (3.8)
(3.8)
На этой основе определяются базовые значения всех переменных и коэффициентов, входящих в уравнения, а также базового времени:
 (3.9)
(3.9)
В дальнейшем используются уравнения только в относительных величинах. Обобщенная система уравнений для описания асинхронной машины принимает вид:
 (3.10)
(3.10)
В этих уравнениях все переменные относительные, полученные как результат деления реальных значений на базовые, все коэффициенты также безразмерные, полученные аналогично. Переменные и параметры в относительных единицах:
 - относительные электромагнитные переменные состояния
- относительные электромагнитные переменные состояния
 - относительная частота статора и относительная скорость ротора
- относительная частота статора и относительная скорость ротора
 - относительный момент на валу машины
- относительный момент на валу машины
 - относительные параметры
- относительные параметры
Безразмерные коэффициенты ряда асинхронных машин даны в приложении.
В уравнениях (3.9) время принято безразмерным , то есть единицей измерения времени является не секундной. Следует отметить, что введение относительных величин существенно сокращает время моделирования и позволяет устранить многие проблемы при моделировании. Рассмотрим предварительно вопросы преобразования координат, а затем модели асинхронной машины в различных системах координат и их основные характеристики.
Дата добавления: 2015-06-17; просмотров: 1962;