Operation of the DC Machine as a Motor
With a dc motor connected across the power line, the impressed voltage forces the current to flow both in. the armature winding .and in the field winding. The field current produces the field flux
of poles. The current in the conductors of the armature winding reacts with the air-gap flux of poles to produce a turning moment, or torque, which tends to cause the armature to revolve. Thus, the motor converts electric energy to mechanical energy.
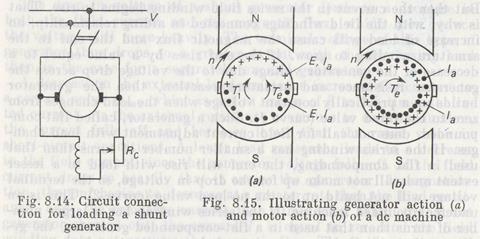
Suppose that a shunt-wound generator is put across a high-power line (Fig. 8.14). The generator load current is defined by the expression I = (E — V)/Ra, where I is the armature current, Ra is the armature winding resistance, E is the emf generated in the armature winding, and V is the line voltage.
The directions of emf and current in the face conductors are shown in Fig. 8.15a. The machine develops an electromagnetic torque Te which is the braking torque, i.e. it consumes mechanical energy and produces electric energy, thus operating in the generating mode.
Reducing the field current causes the flux and the emf generated in the armature winding to decrease. The generator load then drops off. By changing the control resistance Rc, the field current can be brought down to a value at which the armature emf is equal to the line voltage, E =V, and the armature current is equal to zero. The generator thus operates at no load.
If the field current becomes lower than the current corresponding to the no-load operation of the generator, the armature emf will drop below the line voltage and the armature current will reverse its direction (Fig. 8.15b). The direction of the torque Te developed by the machine will then also reverse, i.e. the machine now produces the propelling torque and operates as a motor converting electric energy to mechanical energy. If we disconnect the prime mover, the armature will continue to rotate by the action of the torque Te developed in the machine.
When the armature revolves, the emf is set up in the armature winding, which always opposes the impressed voltage and thus limits the current in the winding. For this reason, the emf generated in a motor armature is called the counter emf of the motor. This emf plays the role of a regulator of the consumed power; the current consumed varies with the counter emf E = cnΦ. The torque developed by the motor is Te = КIΦ.
The impressed voltage is balanced by the sum of the counter emf and the drop in voltage across the armature resistance and brush contacts. So, V = E + IRa.
The armature current and the armature speed are found to be
I = (V- E)/Ra
n = (V — IRa)/сΦ
The condition of steady motor action is the equality of the propelling torque Te and braking (resisting) torque Tb. If the torque Te developed by the motor is equal to the torque Tb due to the load on the shaft, the rotational speed of the motor will remain constant. If these torques are not equal, an additional torque appears, which causes the motor to accelerate or decelerate. If the load on the shaft, i.e. the torque Tb, becomes greater than Te (Tb > Te), the motor will begin to slow down. The counter emf then decreases, with the result that the armature current and the motor torque begin to rise. The speed, counter emf, and the armature current will continue to change until the propelling torque becomes again equal to the resisting torque of the load on the motor shaft.
If the torques fail to come to equilibrium and the braking torque remains higher than the motor torque, Tb > Te, the speed gradually decreases until the motor stops running. The motor may come to rest when the resisting torque of the load is too high or the line voltage drops heavily.
If the load on the shaft decreases, Te >Tb, the motor tends to accelerate, causing the counter emf in the armature winding to grow. The armature current then drops off and, hence, the motor torque decreases. The speed, counter emf, and armature current will continue to change until the torques Te and Tb become equal.
In dc motors, however, conditions may rather often prevail, in which the torques fail to come to equilibrium whatever the changes in the motor speed, and the propelling torque Te remains higher than Tb. If this is the case, the armature speed continuously grows, theoretically tending to infinity. When the speed appreciably exceeds the rated value, the machine breaks down: the band wire fastening the end connections of the winding ruptures and winding conductors drop off the slots. This emergency condition is known as racing, or runaway of the motor.
The direction of armature rotation depends on the polarity of poles and the direction of current in the armature winding conductors. Therefore, to reverse the motor, it is necessary either to interchange the polarity of poles by reversing the terminals of the field winding or to change the direction of current in the armature winding.
The field winding exhibits an appreciable inductance, so it is undesirable to interchange its connections. That is why, dc motors are commonly reversed by changing the connections to the armature winding.
Дата добавления: 2015-06-17; просмотров: 1390;