Устройство и характеристики асинхронного исполнительного двигателя с полым немагнитным ротором
Двигатели с полым немагнитным ротором в настоящее время являются весьма распространенными исполнительными двигателями переменного тока. Основное достоинство их – малоинерционность. что достигается особой конструкцией ротора.
Полый немагнитный ротор выполняется в виде тонкостенного алюминиевого стакана и не имеет сердечника. Такая конструкция обладает малым моментом инерции и обеспечивает весьма ценное свойство – быстродействие.
Двигатели с полым немагнитным ротором выпускаются мощностью от долей до сотен ватт как на промышленную частоту 50 Гц, так и на повышенные частоты – 400, 500, 800 и 1000 Гц.
Конструкция двигателя с полым немагнитным ротором представлена на рис. 3.41. Принцип действия этого двигателя состоит в следующем: переменный ток, протекая по обмоткам статора 3, поле, которое, пересекая полый ротор 4, наводит в нем вихревые токи. В результате взаимодействия этих токов с вращающимся магнитным полем возникает вращающий момент, который, действуя на ротор, увлекает его в.сторону поля. Внешний статор 1 ничем не отличается от статора асинхронного двигателя обычной конструкции. Он набирается из изолированных друг от друга листов электротехнической стали. В пазах статора располагают обмотки 3 управления и возбуждения, сдвинутые в пространстве на 90 эл. град. Эти обмотки выполняют разделенными (рис. 3.42, а) либо соединенными по мостиковой схеме (рис. 3.42, б).
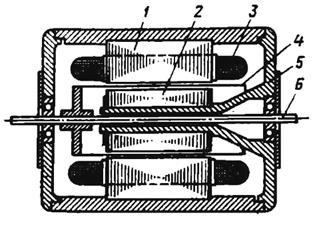
Рис. 3.41. Асинхронный двигатель с полым немагнитным ротором
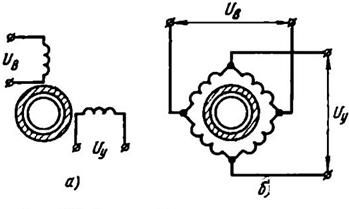
Рис. 3.42. Схемы обмоток статора асинхронного исполнительного двигателя
Мостиковая схема представляет собой замкнутую обмотку с пайками через 90 эл. град. Она позволяет сравнительно просто осуществить пространственный сдвиг обмоток точно на 90 эл. град и способствует лучшему распределению токов и потерь в обмотке. Однако из-за наличия электрической связи цепей возбуждения и управления, а также из-за большого числа отпаек при большом числе пар полюсов (2р) мостиковая схема применяется реже.
Внутренний статор 2 (см. рис. 3.41) набирают из листов электротехнической стали на цилиндрическом выступе одного из подшипниковых щитов 5. Он служит для уменьшения магнитного сопротивления на пути основного (рабочего) магнитного потока.
Полый ротор двигателя 4 выполняют в виде тонкостенного стакана из немагнитного материала – чаще всего из сплавов алюминия. Ротор жестко укреплен на валу 6, который свободно вращается в подшипниках. Толщина стенок ротора зависит от мощности двигателя и составляет  мм. Уменьшение толщины стенок связано с технологической сложностью изготовления стакана ротора.
мм. Уменьшение толщины стенок связано с технологической сложностью изготовления стакана ротора.
Между стенками ротора и внешним и внутренним статорами имеются воздушные зазоры, величины которых обычно не превосходят  мм.
мм.
В двигателях мощностью менее 1,5 Вт обмотки возбуждения и управления часто размещают в пазах внутреннего статора. При этом внешний статор не имеет пазов и служит лишь для уменьшения магнитного сопротивления. Такая конструкция значительно облегчает процесс укладки обмоток в пазы, что особенно важно при малых диаметрах расточки статора, и несколько повышает вращающий момент. При этом диаметр ротора для увеличения обмоточного пространства на внутреннем статоре приходится несколько увеличивать, что приводит к некоторому возрастанию момента инерции ротора. Для частичного уменьшения последнего иногда одну из обмоток размещают на внутреннем, а другую – на наружном статоре.
Характерная особенность двигателя с полым немагнитным ротором – большой немагнитный промежуток на пути потока, который состоит из двух воздушных зазоров (между внешним статором и ротором; между ротором и внутренним статором) и толщины стенки немагнитного стакана ротора. Таким образом, общая величина немагнитного промежутка между внешним и внутренним статорами составляет  мм.
мм.
Вследствие большого немагнитного зазора двигатели с полым немагнитным ротором имеют большой намагничивающий ток (  от номинального тока) и низкий коэффициент мощности. Последний недостаток у двигателей с конденсаторным сдвигом фаз практически мало ощущается, но большая величина намагничивающего тока всегда приводит к большим электрическим потерям в обмотках двигателя и значительно снижает его к. п. д.
от номинального тока) и низкий коэффициент мощности. Последний недостаток у двигателей с конденсаторным сдвигом фаз практически мало ощущается, но большая величина намагничивающего тока всегда приводит к большим электрическим потерям в обмотках двигателя и значительно снижает его к. п. д.
В отличие от всех типов роторов, применяемых в асинхронных исполнительных двигателях, полый немагнитный ротор при большом активном сопротивлении r2 обладает весьма незначительным индуктивным сопротивлением х2. Это свойство ротора способствует значительному повышению качества механических и регулировочных характеристик двигателей.
О рабочих свойствах асинхронных исполнительных двигателей с полым ротором принято судить по их характеристикам, основными из которых являются:
1. Механические характеристики – зависимости вращающего момента М от частоты вращения n2 при постоянном сигнале управления:
 при
при  или
или  .
.
2. Регулировочные характеристики – зависимости частоты вращения n2 от величины или фазы сигнала управления  при постоянном моменте сопротивления на валу:
при постоянном моменте сопротивления на валу:
 или
или  при
при  .
.
3. Зависимости механической мощности на валу Р2 от частоты вращения n2 при постоянном сигнале управления:
 или при .
или при .
Для придания характеристикам универсальности – пригодности для оценки свойств двигателей различных мощностей, частот вращения и т. п. – их строят в относительных единицах.
За базовые (единичные) величины в системе относительных единиц принимают постоянные для любого двигателя величины;
· за единицу момента – пусковой момент  при круговом вращающемся поле;
при круговом вращающемся поле;
· за единицу частоты вращения – синхронную частоту  ;
;
· за единицу мощности – мощность  потребляемую двигателем при пуске, при круговом вращающемся поле;
потребляемую двигателем при пуске, при круговом вращающемся поле;
· за единицу напряжения управления – номинальное напряжение управления  обеспечивающее круговое вращающееся поле при пуске.
обеспечивающее круговое вращающееся поле при пуске.
Вращающий момент m, частота вращения v, мощность p2 напряжение управления – коэффициент сигнала а – в относительных единицах находятся как отношения действительных величин M, n2, P2, UУ к соответствующим базовым (единичным) величинам:
 ;
;  ;
;
 ;
;  .
.
На рис. 3.43, 3.44 и 3.45 приведены механические и регулировочные характеристики, а также зависимости механической мощности на валу от частоты вращения для исполнительных двигателей с полым немагнитным ротором при следующих способах управления: а – амплитудном; б – фазовом; в – амплитудно-фазовом.
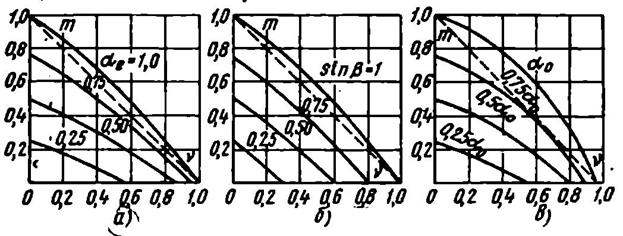
Рис. 3.43. Механические характеристик и исполнительного двигателя с полым немагнитным ротором при различных способах управления
Механические характеристики  исполнительного двигателя с полым немагнитным ротором. При различных способах управления (рис. 4.43) эти характеристики похожи друг на друга. Максимальный момент имеет место при пуске (при v = 0). С увеличением частоты вращения момент постепенно уменьшается и при частоте вращения холостого хода становится равным нулю. Максимальный вращающий момент и максимальную частоту вращения холостого хода двигатель имеет при коэффициенте сигнала, равном единице
исполнительного двигателя с полым немагнитным ротором. При различных способах управления (рис. 4.43) эти характеристики похожи друг на друга. Максимальный момент имеет место при пуске (при v = 0). С увеличением частоты вращения момент постепенно уменьшается и при частоте вращения холостого хода становится равным нулю. Максимальный вращающий момент и максимальную частоту вращения холостого хода двигатель имеет при коэффициенте сигнала, равном единице  . При уменьшении коэффициента сигнала наблюдается смещение механических характеристик в сторону меньших частот вращения и вращающих моментов.
. При уменьшении коэффициента сигнала наблюдается смещение механических характеристик в сторону меньших частот вращения и вращающих моментов.
Механические характеристики при всех способах управления нелинейны – вращающий момент уменьшается с возрастанием частоты вращения не по прямолинейному закону. Наибольшую линейность имеют характеристики при фазовом управлении, наименьшую – при амплитудно-фазовом.
Сравнивая механические характеристики при амплитудном (рис. 3.43, а) и амплитудно-фазовом (рис. 3.43, в) способах управления, можно заметить, что при амплитудно-фазовом управлении двигатель развивает больший момент при средних частотах вращения, но имеет меньшие частоты вращения холостого хода. Первое объясняется тем, что с увеличением частоты вращения v напряжение UB непосредственно на обмотке возбуждения конденсаторного двигателя (после конденсатора) не остается постоянным, как при других способах управления, а возрастает. Это вызывает увеличение магнитного потока машины, а, следовательно, и вращающего момента.
Уменьшение частоты вращения холостого хода в конденсаторном двигателе по сравнению с двигателем при амплитудном управлении объясняется наличием обратного вращающегося поля, которое имеет место при всех режимах амплитудно-фазового управления, кроме пускового (v=0) при a=a0.
Регулировочные характеристики (рис. 3.44). Эти характеристики нелинейны – частота вращения двигателя при всех способах управления с увеличением сигнала управления  растет не по прямолинейному закону. Последнее является весьма существенным недостатком исполнительных двигателей переменного тока, так как в схемах автоматики всегда стремятся к линейному регулированию.
растет не по прямолинейному закону. Последнее является весьма существенным недостатком исполнительных двигателей переменного тока, так как в схемах автоматики всегда стремятся к линейному регулированию.
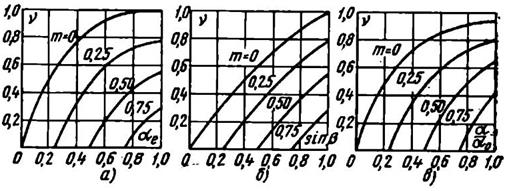
Рис. 3.44. Регулировочные характеристики исполнительного двигателя с полым немагнитным ротором
Наибольшую линейность имеют характеристики при фазовом управлении (рис. 3.44, б), наименьшую – при амплитудно-фазовом (рис. 3.44, в).
Регулировочные характеристики при всех способах управления имеют наиболее линейные участки при малых относительных частотах вращения (в начальной их части). Именно поэтому на практике стараются работать в зоне малых относительных частот вращения, для чего применяют двигатели, рассчитанные на повышенные частоты переменного тока f1:
 (3.84)
(3.84)
Рассматривая семейства регулировочных характеристик, нетрудно заметить, что напряжение (сигнал) трогания двигателя, т. е. то минимальное напряжение управления, при котором ротор двигателя, имея определенную нагрузку на валу, трогается с места, пропорционально моменту сопротивления  . Напряжение трогания в относительных единицах (коэффициенты сигнала
. Напряжение трогания в относительных единицах (коэффициенты сигнала  ) равно моменту сопротивления m.
) равно моменту сопротивления m.
Зависимости механической мощности на валу от частоты вращения p2=f(v) (рис. 3.45). Эти характеристики нетрудно получить из механических характеристик путем умножения вращающего момента m на соответствующую ему частоту вращения v:
p2=mv (3.85)
Механическая мощность на валу р2 равна нулю при пуске, когда v=0, и холостом ходе, когда m=0, и достигает максимума при частотах, примерно равных половине частоты вращения холостого хода.
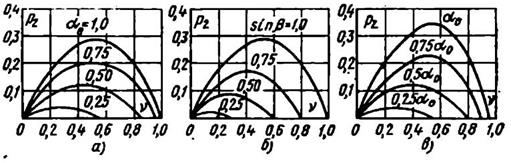
Рис. 3.45. Зависимость механической мощности на валу от частоты вращения исполнительного двигателя с полым немагнитным ротором
За номинальную мощность исполнительного двигателя обычно принимают максимальную механическую мощность р2max. Частота вращения, соответствующая этой мощности, считается номинальной.
Чем больше механическая характеристика приближается к линейной, тем меньше максимальная механическая мощность двигателя и тем ближе поминальная частота вращения к частоте, равной половине частоты холостого хода. Наибольшие номинальные частоты вращения, а следовательно, и максимальные механические мощности имеют двигатели с амплитудно-фазовым управлением (рис. 3.45, в), наименьшие – двигатели с фазовым управлением (рис. 3.45, б).
К положительным свойствам двигателей с полым немагнитным ротором следует отнести: малую инерционность ротора, значительный диапазон регулирования частоты вращения, высокую надежность, бесшумность, хорошую стабильность характеристик.
К недостаткам следует отнести низкие к. п. д. и  , большие габариты и вес.
, большие габариты и вес.
Дата добавления: 2015-06-12; просмотров: 2244;