Самоход и пути его устранения
Двигатель имеет самоход, если его ротор вращается при отсутствии сигнала управления  .
.
На практике встречаются два вида самоходов: принципиальный параметрический самоход, причиной которого является неправильный расчет при проектировании двигателя, и технологический самоход, появляющийся вследствие некачественного изготовления двигателя.
Параметрический самоход обычно проявляется при снятии сигнала управления у двигателя, работающего с малым моментом сопротивления на валу. Причина этого – недостаточно большое активное сопротивление ротора. Последнее может быть объяснено следующим образом.
При снятии сигнала управления магнитное поле исполнительного двигателя становится пульсирующим – двигатель из двухфазного превращается в однофазный. Известно, что однофазные асинхронные двигатели с малым активным сопротивлением ротора и, следовательно, малым критическим скольжением  при n2=0 не создают пускового момента. Однако при
при n2=0 не создают пускового момента. Однако при  они развивают вращающий момент (см. § 9.1). Это значит, что при отключении одной из обмоток у работающего двухфазного двигателя его ротор продолжает вращаться, т. е. двигатель имеет самоход – продолжает работать как однофазный.
они развивают вращающий момент (см. § 9.1). Это значит, что при отключении одной из обмоток у работающего двухфазного двигателя его ротор продолжает вращаться, т. е. двигатель имеет самоход – продолжает работать как однофазный.
Для устранения самохода асинхронные исполнительные двигатели выполняются с повышенным активным сопротивлением ротора r2. Увеличение активного сопротивления ротора (см. § 8.9) смещает максимум механической характеристики  в сторону меньших, а затем и отрицательных частот вращения (скольжений, больших единицы). В связи с этим результирующий вращающий момент
в сторону меньших, а затем и отрицательных частот вращения (скольжений, больших единицы). В связи с этим результирующий вращающий момент  уменьшится, а при
уменьшится, а при  станет даже отрицательным (рис. 3.40).
станет даже отрицательным (рис. 3.40).
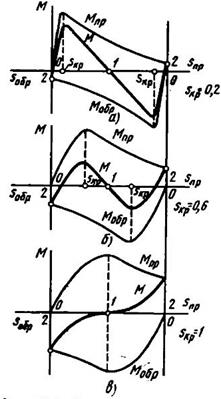
Рис. 3.40. К вопросу о самоходе
Так, например, если в качестве исполнительного двигателя использовать двигатели с небольшим активным сопротивлением ротора (рис. 10.3: а –  ; б –
; б –  ), то после снятия сигнала управления, когда магнитное поле в двигателе станет пульсирующим, результирующий момент М остается положительным и ротор продолжает вращаться в том же направлении. Если использовать двигатель с повышенным активным сопротивлением ротора
), то после снятия сигнала управления, когда магнитное поле в двигателе станет пульсирующим, результирующий момент М остается положительным и ротор продолжает вращаться в том же направлении. Если использовать двигатель с повышенным активным сопротивлением ротора  , то после снятия сигнала управления при пульсирующем поле (рис. 3.40, в) вращающий момент становится отрицательным и останавливает ротор двигателя.
, то после снятия сигнала управления при пульсирующем поле (рис. 3.40, в) вращающий момент становится отрицательным и останавливает ротор двигателя.
В этом случае время останова ротора за счет действия отрицательного (тормозного) момента даже меньше, чем при одновременном снятии напряжений с обеих обмоток (управления и возбуждения), когда вращающий момент равен нулю.
В схемах автоматики сигнал управления может сниматься (понижаться до нуля) либо без разрыва цепи управления, либо с разрывом. В первом случае явление самохода устранить значительно проще.
В асинхронных исполнительных двигателях для устранения самохода активное сопротивление ротора выбирают весьма значительным с таким расчетом, чтобы критическое скольжение  .
.
Значительное увеличение активного сопротивления ротора r2, способствуя устранению самохода, отрицательно сказывается на энергетических показателях двигателя: вызывает увеличение электрических потерь в роторе (снижение к. п. д.), а вызываемое увеличением r2 смещение механической характеристики в сторону меньших частот вращения (больших скольжений) приводит к резкому уменьшению механической мощности на валу двигателя  , а при
, а при  – и к уменьшению пускового момента. Именно поэтому номинальная мощность асинхронных исполнительных двигателей в два-три раза меньше номинальной мощности силовых асинхронных двигателей (с малым r2) тех же габаритов.
– и к уменьшению пускового момента. Именно поэтому номинальная мощность асинхронных исполнительных двигателей в два-три раза меньше номинальной мощности силовых асинхронных двигателей (с малым r2) тех же габаритов.
Технологический самоход проявляется сразу после включения в сеть обмотки возбуждения, когда сигнал управления еще не подан.
Причина технологического самохода – возникновение слабого эллиптического поля за счет некачественного изготовления двигателя, за счет наличия: замыканий между листами стали пакета статора; короткозамкнутых витков в обмотке; неодинаковой магнитной проводимости машины в различных радиальных направлениях; неравностенности полых роторов и т. п.
Для устранения технологического самохода необходимо качественное изготовление двигателей: тщательная изоляция обмоток, листов стали; сборка пакетов стали веером и т. п.
Дата добавления: 2015-06-12; просмотров: 1047;