ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ №20
1. Какая схема обозначена на рисунке. Как изменится выходной сигнал по фазе и амплитуде. Чему будет равен коэффициент усиления по напряжению если R1=2 Ом, с сопротивление обратной связи RОС = 20 Ом.

 Неинвертирующий усилитель на ОУНеинвертирующий усилитель изображен на (рис. 1.11).
Неинвертирующий усилитель на ОУНеинвертирующий усилитель изображен на (рис. 1.11).
Рис. 1.11
Данная схема позволяет использовать в качестве неинвертирующего усилителя ОУ, схема обладает высоким полным входным сопротивлением, причем коэффициент усиления всей схемы по напряжению может быть жестко задан с помощью сопротивлений R1 и Rос.В данной схеме входной сигнал подается на неинвертирующий вход ОУ.
Усилитель содержит последовательную отрицательную обратную связь по напряжению, создаваемую на резисторе Rос и поданную на инвертирующий вход.
Полное входное сопротивление всей схемы оказывается высоким, так как единственным путем для тока между входом и землей является высокое полное входное сопротивление ОУ.
Сопротивления R1 и Rос образуют делитель напряжения с очень малой нагрузкой, так как ток, необходимый для управления усилителем, очень мал ( Iсм >> 0 ).
Поэтому через R1 и Rос течет одинаковый ток и напряжение, приложенное к инвертирующему входу, равно:
Uвх.инв = UвыхR1/R1+Rос Так как IR1 = IRос , Rвх 
 , имеем
, имеем
IR1 = UR1/R1 , IRос = URос/Rос , Uвх.инв = Uвх + Uq, поэтому
IR1 = (Uвх + Uq)/R1 , IRx = (Uвых - (Uвх + Uq)) / Rос Следовательно:
(Uвх + Uq) / R1 = (Uвых - (Uвх + Uq)) / Rос Так как
Uвых = KUq и Uq = Uвых / K, то если K  , Uq >>0, можно написать
, Uq >>0, можно написать
Uвх / R1 = (Uвых - Uвх) / Rос
Найдем отсюда коэффициент усиления схемы Uвых / Uвх , который называют коэффициентом усиления с замкнутой ОС (Kос), или коэффициентом усиления замкнутого усилителя, т.е.
UвхRос = R1Uвых - R1Uвх Uвх(Rос + R1) = R1Uвых (Rос + R1) / R1 = Uвых / Uвх = Кос
Кос = Rос / R1 +1 , когда К>>Кос.
Сопротивления R1 + Rос следует выбирать так, чтобы общий ток нагрузки с учетом этого сопротивления не превышал максимального выходного тока усиления.
КОУ=1+  1+20/2=11
1+20/2=11
Фаза не изменится, амплитуда будет больше в 11 раз?
2. Динамическое управление триггерами. Обозначение динамических входов на принципиальных схемах.
Все триггеры делятся на две большие группы: асинхронные и синхронные. В асинхронных триггерах изменение их внутреннего состояния определяется только сигналами, поступающими на так называемые информационные входы. Примером асинхронного триггера является рассмотренный R-S триггер.
Во многих случаях более удобны синхронные триггеры. В таких триггерах состояние изменяется в зависимости от сигналов имеющихся на информационных входах, но только при условии подачи синхронизирующего сигнала на дополнительный управляющий вход. Такой управляющий вход часто называют тактовым. Тактовым называют и сигнал, который на этот вход подается. Введение тактирования не изменяет таблицу истинности и характеристическое уравнение триггера. Эти уравнения и таблицы одинаковы как для синхронных, так и для асинхронных триггеров.
Различают три разновидности синхронных триггеров:
— триггеры со статическим управлением записью;
— триггеры с динамическим управлением записью;
— двухступенчатые триггеры.
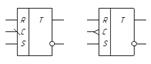
При динамическом управлении записью, эта запись возможна только очень короткое время вблизи переднего или заднего фронта тактирующего импульса. Сама длительность импульса здесь роли не играет. На схемах триггеры с динамическим управлением записью изображают следующим образом:
а) триггер с динамическим управлением записью по переднему фронту;
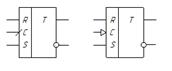
б) триггер с динамическим управлением записью по заднему фронту;
Рассмотренные ранее способы подачи входных сигналов характеризуются тем, что их активными уровнями являются статические состояния, т.е. сами уровни напряжения логического нуля или логической единицы. Такая форма управления цифровым устройством называется статической. Для тактируемых устройств эта форма управления в большинстве случаев является неудобной, поскольку в течение всего времени действия импульса сигнала синхронизации, устройство будет реагировать на любые изменения входных информационных сигналов. Таким образом, необходимо, чтобы информационные сигналы оставались неизменными на протяжении действия импульса синхронизации. Это значительно усложняет схему устройства, а в некоторых случаях и вовсе является не решаемой задачей, поскольку информационные сигналы могут носить характер случайной последовательности импульсов. Для устранения указанного недостатка используется принцип динамического управления. Согласно этому принципу, активным считается не статический уровень напряжения логической единицы или логического нуля, а процесс перехода из одного уровня в другой. Этот процесс представляет собой передний или задний фронт тактирующего импульса и, следовательно, характеризуется малым временным промежутком. Поэтому задача синхронизации значительно упрощается и представляет собой фиксацию входных информационных сигналов в строго определенный момент подачи или снятия импульса синхронизации. На рис. 5.13 показаны условные обозначения входов микросхем с динамическим управлением. В качестве сигнала выбран управляющий сигнал синхронизации С.
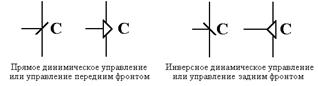
Рис. 5.13. Обозначение входов динамического управления.
Дата добавления: 2015-04-07; просмотров: 1108;