Принцип действия трехфазного асинхронного двигателя
Трехфазный асинхронный двигатель, схематично показанный на рис.1—это двухполюсный двигатель с короткозамкнутым ротором.
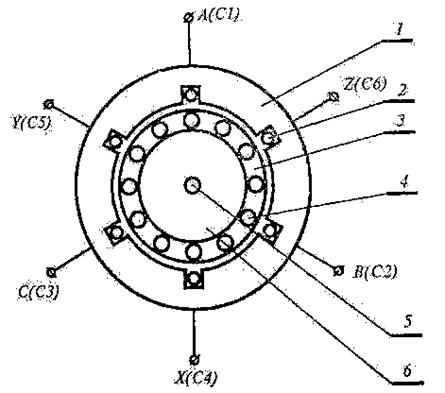
Рис.1. Конструктивная схема трёхфазного асинхронного двигателя с короткозамкнутым ротором: 1—сердечник статора; 2—обмотка статора; 3—короткозамыкающее кольцо обмотки ротора; 4—рабочие стержни работы ротора; 5—вал; 6—сердечник ротора
При подаче трехфазного напряжения на зажимы статорной обмотки в его магнитной системе, как уже отмечалось выше, возникает вращающееся магнитное поле с полюсами No - So, эквивалентное полю постоянного магнита.
Для рассмотрения принципа действия двигателя условно заменим вращающееся магнитное поле статора полем постоянного магнита, который будем вращать по часовой стрелке (рис. 2, а), а коротко- замкнутую обмотку ротора - одним короткозамкнутым витком (рис. 2, б), закрепленным на осях с возможностью вращения.
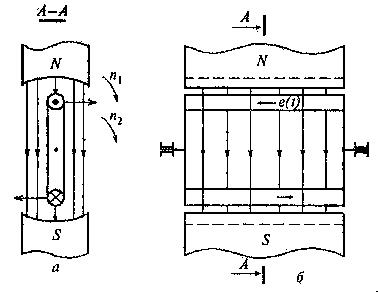
Рис. 2. Условное обозначение асинхронного двигателя для объяснения принципа действия: а - вид спереди; б - вид сбоку
В момент запуска двигателя, когда ротор (изображаемый короткозамкнутым витком) неподвижен, а внешнее магнитное поле начало вращаться, силовые линии этого поля пересекают обмотки ротора и наводят в ней ЭДС, направление которой можно определить, используя правило правой руки.
Напомним его: «Если правую руку расположить так, чтобы силовые линии входили в ладонь, а отогнутый большой палец показывал направление движения проводника относительно магнитного поля, то вытянутые четыре пальца покажут направление наведенной ЭДС».
Обратим внимание на то, что в данном случае относительно движущегося по часовой стрелке магнитного поля проводник (будучи пока неподвижным) как бы перемещается в противоположном направлении. Поэтому, согласно правилу правой руки, в верхней части витка ЭДС будет направлена к нам, а в нижней части нитка - от нас.
Так как ЭДС возникает в замкнутом витке, то под ее действием пойдет электрический ток, практический совпадающий по фазе с ЭДС.
Проводник же с током, находящийся в магнитном поле, будет из него выталкиваться в направлении, определенном правилом левой руки:
«Если расположить левую руку так, чтобы силовые линии входили в ладонь, а четыре вытянутых пальца показывали направление тока в проводнике, то отогнутый большой палец покажет направление выталкивающей силы, действующей на проводник».
Если применить это правило, то окажется, что верхний проводник выталкивается из поля вправо, а нижний — влево, т. е. электромагнитные силы, приложенные к неподвижному ротору, создают пусковой момент, стремящийся повернуть ротор в направлении движения магнитного поля.
Когда электромагнитный момент, действующий на неподвижный ротор, превышает тормозной момент на валу, ротор получает ускоренное движение в направлении вращения магнитного поля двигателя.
По мере возрастания частоты вращения п1 ротора относительная разность частот я1 - п2 сокращается, вследствие чего уменьшаются величины ЭДС и тока в проводниках ротора, что влечет за собой соответствующее уменьшение вращающего момента.
Процессы изменения ЭДС, тока, момента и частоты вращения ротора прекратятся, как только наступит устойчивое равновесие между электромагнитным моментом, вызывающим вращение ротора, и тормозным моментом (моментом сопротивления), создаваемым производственным механизмом, который приводится в движение электродвигателем. При этом ротор машины будет вращаться с постоянной частотой пь а в короткозамкнутых контурах его обмотки установятся токи, обеспечивающие создание вращающего момента, равного моменту тормозному.
Таким образом, принцип работы асинхронных двигателей основан на взаимодействии вращающегося магнитного поля статора с токами, которые наводятся этим полем в проводниках ротора. Очевидно, что возникновение токов в роторе и создание вращающегося момента возможны лишь при движении проводников ротора относительно магнитного поля машины, т. е. при наличии разности частот вращения магнитного поля статора п1и ротора п2 (п1- п2) должно быть больше 0.
Для примера определим, что же произойдет, если частота вращения ротора п2 сравнится с частотой вращения магнитного поля статора п1 (п1 = п2).
Магнитное поле статора и ротор будут в этом случае неподвижны относительно друг друга. Силовые линии магнитного поля статора не будут пересекать обмотку ротора, следовательно, в ней не будет наводиться ЭДС, не появится ток, не будет и выталкивающей силы.
Ротор несколько притормозится, но как только возникает разность частот вращения п1-п2, вновь в обмотке ротора наведется ЭДС, появится ток и начнут действовать выталкивающая сила и электромагнитный момент.
Таким образом, ротор вращаться с синхронной частотой пх в естественных условиях не может.
Отсюда следует важный вывод о том, что магнитное поле статора и ротор АД вращаются в пространстве в одном направлении, но с разной частотой: частота вращения ротора двигателя п2 всегда меньше частоты вращения п{ магнитного поля статора. С этим связано, кстати, и название машины: асинхронный двигатель.
При анализе работы асинхронных машин пользуются безразмерным параметром S, называемым скольжением и определяемым разностью частот вращения магнитного поля статора п1 и ротора п2 выраженной в относительных единицах (отнесенной к п1): S=(n1-n2)/n1.
Это выражение часто записывают следующим образом: п2 = п1(I- S).
В соответствии с этим соотношением зависимость частоты вращения ротора п2 от скольжения при заданной п] графически выражается прямой, построенной в двух граничных режимах при запуске двигателя п2 = 0, т. е. скольжение S = 1, а при п2 =п1, (так называемый идеальный холостой ход) S=0 (рис.3). Следовательно, режим двигателя характеризуется скольжением, изменяющимся от 1 до 0.
Номинальное же скольжение Sн современных машин общепромышленного исполнения Sн = 1-3 %. Например, при п1 = 3000 об/мин и S = 1 % ротор будет вращаться с частотой, всего на 30 об/мин меньше, чем п1 (п2 = 2970 об/мин).
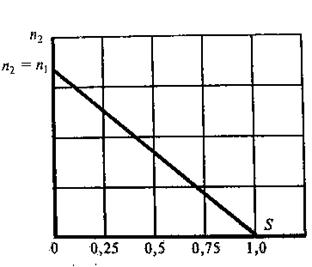
Рис.3 График зависимости частоты вращения ротора трехфазного асинхронного двигателя от скольжения
Дата добавления: 2015-06-10; просмотров: 3860;