Датчики
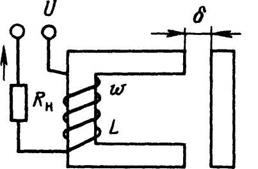
Ряд систем регулиро вания перемещений или усилий основан на при менении индуктивных датчиков, действие которых определяется зависимостью индуктивности катушки от магнитного сопротивления сер дечника. Например, индуктивность преобразо вателя перемещения (рисунок 1.1) определяется выражением
L = WSµ0/2δ (1.1)
где,S-площадь сечения магнитопровода; δ-за зор в магнитопроводе; µ0-магнитная постоян ная зазора;
W-число витков катушки.
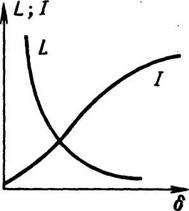
При изменении зазора δ (под действием уси лия X) или площади сечения магнитопровода S (при перемещении подвижной пластины вверх или вниз) изменяется индуктивность, а следовательно,и ток в нагрузке Rн
I = U/√ Rн2+(ωL)2 (1.2)
где, U-напряжение источика питания;
ω = 2πf, f-частота тока.
Большое распространение получили диф ференциальные индуктивные датчики с двумя дросселями (рисунок 1.5). Они обладают более ли нейной характеристикой и требуют меньших уси лий для перемещения подвижной пластины. В трансформаторных датчиках измеряемое перемещение X изменяет коэффициент индуктив ной связи между двумя обмотками-первичной, питаемой напряжением переменного тока U, и вторичной, с которой снимается сигнал UBbIХ. На рисунок 1.4 показана схема П-образного трансфор маторного датчика.
|
|
Рисунок 1.4.Преобразователь смещения.
 |
Рисунок 1.5. Диф ференциальный индуктивный датчик с двумя дросселями.
Выходное напряжение такого датчика можно вычислить по формуле
Uвых=W2U1/W1 (1.3)
где U1=UZ1(Z1+Z2) и Z1=ωL≈ωµ0WS/2δ
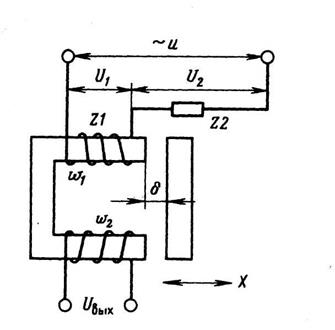
Рисунок 1.6 П-образный трансфор маторный датчик.
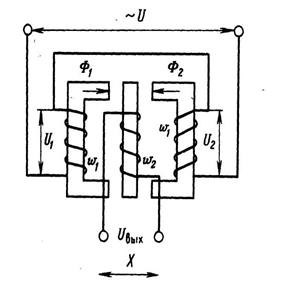
Рисунок 1.7. Дифференциальный трансформаторный датчик.
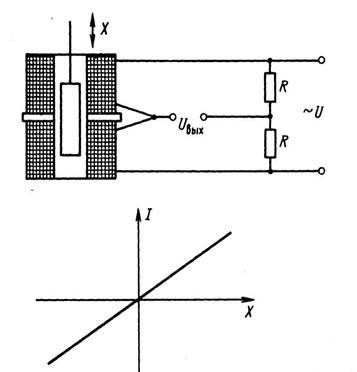
Рисунок 1.9 Характеристика прос того соленоидного датчика и его включение в мостовую цепь измерения.
Схема дифференциального трансформатор ного датчика приведена на рисунке 1.
На рисунке 1.8 приведена схема трансформа торного датчика соленоидного типа, у которого магнитная связь между первичной и двумя вто ричными обмотками осуществляется перемеща ющимся ферритовым сердечником.На рисунок 1.9 показаны характеристика прос того соленоидного датчика и его включение в мостовую цепь измерения.
К индуктивным датчикам относятся и магнитострикционные датчики, в основу которых положена зависимость магнитной проницае мости некоторых материалов (железомарганцевого сплава и др.) от упругих деформаций. На рис. 8 приведена схема измерения усилия X магнитострикционным датчиком. При воздейст вии давления на магнитопровод изменяется его магнитная проницаемость µ и, следовательно, магнитное сопротивление участка магнитопро-вода. В результате изменяются индуктивность катушки и выходное напряжение.
Дата добавления: 2015-06-01; просмотров: 1015;